Vous aimerez peut-être aussi
- Fiabilité, maintenance prédictive et vibration des machinesD'EverandFiabilité, maintenance prédictive et vibration des machinesPas encore d'évaluation
- D5-1 Classification Des Machines Tournantes PDFDocument12 pagesD5-1 Classification Des Machines Tournantes PDFhamraoui chahrazedPas encore d'évaluation
- 2FI 16-17 ExamenDocument4 pages2FI 16-17 ExamenEl GhafraouiPas encore d'évaluation
- Parking Automatique Grafcet EEPROM Du 16F84 Interruptions Du 16F84 Programmation Du P.L.D CorrigéDocument19 pagesParking Automatique Grafcet EEPROM Du 16F84 Interruptions Du 16F84 Programmation Du P.L.D CorrigéLeonardo Cameroun SARLPas encore d'évaluation
- Technologie UNITE DE BOUCHAGE DES BOUTEILLES DE LAIT - 2ème Sciences (2011-2012) MR Walid (Full Permission)Document5 pagesTechnologie UNITE DE BOUCHAGE DES BOUTEILLES DE LAIT - 2ème Sciences (2011-2012) MR Walid (Full Permission)Kamel TayahiPas encore d'évaluation
- Analyse Fonctionnelle AscenseurDocument6 pagesAnalyse Fonctionnelle AscenseursalawaPas encore d'évaluation
- Cours Maintenance Industrielle Partie 1Document23 pagesCours Maintenance Industrielle Partie 1Yessine OmranePas encore d'évaluation
- Grafcet APIDocument83 pagesGrafcet APIrabha ou benaceurPas encore d'évaluation
- AMDEC Et Analyse DysfonctionnelleDocument6 pagesAMDEC Et Analyse DysfonctionnelleMouna LaïfaPas encore d'évaluation
- TARIERE ELECTRIQUE: Analyse FonctionnelleDocument34 pagesTARIERE ELECTRIQUE: Analyse FonctionnellengouoPas encore d'évaluation
- Monte ChargeDocument9 pagesMonte ChargeSaid BennayaPas encore d'évaluation
- API ExamenDocument4 pagesAPI Examenchakroun ahmedPas encore d'évaluation
- 1-Commande D'un Afficheur Et Un PortaileDocument15 pages1-Commande D'un Afficheur Et Un PortaileBarchan Yâ SînPas encore d'évaluation
- Cours AsserDocument62 pagesCours AsserYousif AliPas encore d'évaluation
- AYAT Nabil SE DevoirDocument4 pagesAYAT Nabil SE DevoirayatPas encore d'évaluation
- Chapitre 3Document11 pagesChapitre 3Rayan BenachourPas encore d'évaluation
- Perceuse Automatique: Présenté ParDocument7 pagesPerceuse Automatique: Présenté ParMohamed Amine ZouhriPas encore d'évaluation
- 4 Etude de Cas Systemes HydroliqueDocument23 pages4 Etude de Cas Systemes Hydroliquesalma_herriPas encore d'évaluation
- Documentation EcostruxureDocument330 pagesDocumentation EcostruxureMoctar TallePas encore d'évaluation
- MOT-APST Exercices Part1Document2 pagesMOT-APST Exercices Part1ahmed lakhlifiPas encore d'évaluation
- AutomatiqueDocument14 pagesAutomatiqueyasine100% (1)
- TP 3 Corps Dun Porte - OutiDocument5 pagesTP 3 Corps Dun Porte - Outiayman zianiPas encore d'évaluation
- Analyse FonctionnelleDocument4 pagesAnalyse FonctionnelleCharaf Leo100% (1)
- Série 1 Processus Industriels GRAFCETDocument4 pagesSérie 1 Processus Industriels GRAFCETCherdouh RabahPas encore d'évaluation
- ECE 2004-Corrige PDFDocument6 pagesECE 2004-Corrige PDFbaydiPas encore d'évaluation
- EXA AutoDocument6 pagesEXA Autoقرين لطفيPas encore d'évaluation
- 05 - La Disponibilité Des Systèmes RéparablesDocument9 pages05 - La Disponibilité Des Systèmes RéparablesAnime forever 2016Pas encore d'évaluation
- Exercice 3 Cor RigDocument3 pagesExercice 3 Cor RigtataPas encore d'évaluation
- Grafcet Intro V2 FRDocument50 pagesGrafcet Intro V2 FRJasminPas encore d'évaluation
- m2102 Autom Fascicule TD PDFDocument39 pagesm2102 Autom Fascicule TD PDFEL Mansour BrahimPas encore d'évaluation
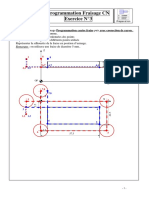
- Exercice N°3 - Programmation Partie Fraisage CN - CorrectionDocument3 pagesExercice N°3 - Programmation Partie Fraisage CN - CorrectionAymen GmarPas encore d'évaluation
- TD GRACET Percage Correction PDFDocument5 pagesTD GRACET Percage Correction PDFMAYSSA AMORPas encore d'évaluation
- Analyse Fonctionnelle:: Energie Électrique Energie MécaniqueDocument22 pagesAnalyse Fonctionnelle:: Energie Électrique Energie MécaniqueÂÿâčhê Îsmâïl0% (1)
- TP Automatique Seq PDFDocument11 pagesTP Automatique Seq PDFKoúp CobainPas encore d'évaluation
- MMOAMPA - 10 - Maintenance Des Circuits Électroniques de Comma PDFDocument143 pagesMMOAMPA - 10 - Maintenance Des Circuits Électroniques de Comma PDFMohammed Moha ChtiouiPas encore d'évaluation
- Exercice6 PLDocument4 pagesExercice6 PLmaitriza09Pas encore d'évaluation
- Rapport de Stage de Oughilass Najib 03-2013Document46 pagesRapport de Stage de Oughilass Najib 03-2013Aberbri AbderrahimPas encore d'évaluation
- Exercice 10 - Traitement de Surface - Cours TechniqueDocument1 pageExercice 10 - Traitement de Surface - Cours Techniquejames morgan0% (1)
- Correction Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021Document5 pagesCorrection Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021aliPas encore d'évaluation
- 1-Butée de CommandeDocument1 page1-Butée de CommandeSouhayle LamrabetPas encore d'évaluation
- Brochage Du Pilote IR2110 Mosfet, Exemples, Applications Et Mode D'emploiDocument7 pagesBrochage Du Pilote IR2110 Mosfet, Exemples, Applications Et Mode D'emploiAyoub RajawiPas encore d'évaluation
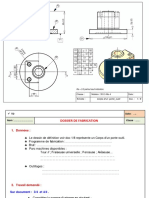
- Flasque AvantDocument7 pagesFlasque AvantBadr HadriPas encore d'évaluation
- Technologie - Les Composants Pneumatiques (1 Ère Partie)Document31 pagesTechnologie - Les Composants Pneumatiques (1 Ère Partie)Nicola VitulliPas encore d'évaluation
- Analyse Quantitative Des DéfaillancesDocument5 pagesAnalyse Quantitative Des DéfaillancesAkram SahliPas encore d'évaluation
- Un Systeme de Tri Et L Assemblage de PieDocument31 pagesUn Systeme de Tri Et L Assemblage de PieAmrouchene Djouher100% (1)
- DS CN CFM Novembre 2018Document4 pagesDS CN CFM Novembre 2018Naoufel FaresPas encore d'évaluation
- Schéma Ladder Chaine Embouteillage-2-3Document2 pagesSchéma Ladder Chaine Embouteillage-2-3Youness Bakache100% (1)
- Machine de Perçage Et Découpage Automatisée: I. Cahier de ChargeDocument3 pagesMachine de Perçage Et Découpage Automatisée: I. Cahier de ChargeSyrine MzoughiPas encore d'évaluation
- UTBM Automates-Programmables 2005 GESCDocument6 pagesUTBM Automates-Programmables 2005 GESCBAMBA Lango Richard100% (1)
- AutomatismeDocument89 pagesAutomatismeAbdelhadi EnnajihPas encore d'évaluation
- Robotique Mini ProjetDocument6 pagesRobotique Mini ProjetChahinez Moates0% (1)
- Série D - Exercices N°9-3Tech-Pic PDFDocument11 pagesSérie D - Exercices N°9-3Tech-Pic PDFlhoussain100% (1)
- TD - Localisation Des DéfaillancesDocument16 pagesTD - Localisation Des Défaillanceskhaled souli100% (1)
- Correction Manuel D'activité 20-39Document20 pagesCorrection Manuel D'activité 20-39Oula F'zPas encore d'évaluation
- TDCorrectionDocument46 pagesTDCorrectionRomaël YenoPas encore d'évaluation
- Unicon Modbus Master: Cxe/Av (E), Cxg-24Av (E)Document116 pagesUnicon Modbus Master: Cxe/Av (E), Cxg-24Av (E)Emanuel LucaPas encore d'évaluation
- Eurotherm - Puissance - Technique - Manuels - MC EPower - MC EPower-MU-HA179891-3 PDFDocument262 pagesEurotherm - Puissance - Technique - Manuels - MC EPower - MC EPower-MU-HA179891-3 PDFKechaouPas encore d'évaluation
- Manuel Marantec Comfort 250Document38 pagesManuel Marantec Comfort 250ArnaudBouffartPas encore d'évaluation
- Am PremiumDocument89 pagesAm PremiumAh MedPas encore d'évaluation
- DRS-BB Manuel Technique FRDocument71 pagesDRS-BB Manuel Technique FRsmail jacobPas encore d'évaluation
- Pfe GM 0500 PDFDocument82 pagesPfe GM 0500 PDFAbdessattar AbdouPas encore d'évaluation
- Les BecDocument8 pagesLes BecAbdessattar AbdouPas encore d'évaluation
- Vehelec Vehhybrid PDFDocument84 pagesVehelec Vehhybrid PDFAbdessattar AbdouPas encore d'évaluation
- BTS MI Analyse Fonctionnelle Et Structurelle 2008Document30 pagesBTS MI Analyse Fonctionnelle Et Structurelle 2008Abdessattar AbdouPas encore d'évaluation
- BiblioDocument15 pagesBiblioAbdessattar AbdouPas encore d'évaluation
- Mode - Operatoire M - Schäfer - 1000 - FR - 2013 PDFDocument59 pagesMode - Operatoire M - Schäfer - 1000 - FR - 2013 PDFAbdessattar Abdou100% (1)
- Press 2Document39 pagesPress 2Abdessattar AbdouPas encore d'évaluation
- Final PDFDocument109 pagesFinal PDFAbdessattar AbdouPas encore d'évaluation
- Systeme Frein Doc AR (FR) LKDocument9 pagesSysteme Frein Doc AR (FR) LKAbdessattar AbdouPas encore d'évaluation
- Les BecDocument8 pagesLes BecAbdessattar AbdouPas encore d'évaluation
- Emploi Du Temps Charguia Pôle GCEMDocument34 pagesEmploi Du Temps Charguia Pôle GCEMAbdessattar AbdouPas encore d'évaluation
- Assistance Au FreinageDocument5 pagesAssistance Au FreinageAbdessattar AbdouPas encore d'évaluation
- Catalogue ChaineDocument201 pagesCatalogue ChaineAbdessattar AbdouPas encore d'évaluation
- Tutorial FAODocument25 pagesTutorial FAOAbdessattar AbdouPas encore d'évaluation
- Exercice: Vérificateur de Pesée: LABIDI TasnimDocument1 pageExercice: Vérificateur de Pesée: LABIDI TasnimAbdessattar Abdou67% (3)
- Tutorial FAODocument25 pagesTutorial FAOAbdessattar AbdouPas encore d'évaluation
- TD4 TableauxDocument3 pagesTD4 TableauxAbdessattar Abdou100% (4)
- TD1 Algo CDocument1 pageTD1 Algo CAbdessattar AbdouPas encore d'évaluation
- Matériaux CompositsDocument37 pagesMatériaux CompositsAbdessattar AbdouPas encore d'évaluation
- Assis FreinDocument5 pagesAssis FreinAbdessattar AbdouPas encore d'évaluation
- Systeme Frein Doc AR (FR) LKDocument9 pagesSysteme Frein Doc AR (FR) LKAbdessattar AbdouPas encore d'évaluation
- Systeme Frein Doc AR (FR) LKDocument9 pagesSysteme Frein Doc AR (FR) LKAbdessattar AbdouPas encore d'évaluation
- SticapDocument22 pagesSticapAbdessattar Abdou100% (2)
- Chap4 PDFDocument82 pagesChap4 PDFYassineModrichPas encore d'évaluation
- ProgccDocument17 pagesProgccAbdessattar AbdouPas encore d'évaluation
- Lexique Matlab PDFDocument2 pagesLexique Matlab PDFmourad2msilaPas encore d'évaluation
- Travaux Dirigees de Resistance Des Materiaux Corrige PDFDocument71 pagesTravaux Dirigees de Resistance Des Materiaux Corrige PDFGenie MecaPas encore d'évaluation
- TP AutomatikDocument11 pagesTP AutomatikAbdessattar AbdouPas encore d'évaluation
- Notions Mecanique Des Fluides. " Riadh BEN HAMOUDA "Document140 pagesNotions Mecanique Des Fluides. " Riadh BEN HAMOUDA "Salma Brb83% (6)
- Chapitre 1 - INTRODUCTION A LA PROGRAMMATIONDocument21 pagesChapitre 1 - INTRODUCTION A LA PROGRAMMATIONaliousadiadiedhiou395Pas encore d'évaluation
- Recherche OpérationnelleDocument41 pagesRecherche Opérationnelleben haydarPas encore d'évaluation
- Glpi RedDocument23 pagesGlpi Redredouane854Pas encore d'évaluation
- Réseaux InformatiquesDocument15 pagesRéseaux InformatiquesOthmane MadaniPas encore d'évaluation
- DelphiDocument40 pagesDelphiloesouleymanePas encore d'évaluation
- 2.PresentationMerise Cuorbe SoleilDocument14 pages2.PresentationMerise Cuorbe SoleilEnzo NiniPas encore d'évaluation
- Arduino - Programme InformatiqueDocument20 pagesArduino - Programme InformatiqueVîctôřîâ BrâhîmîPas encore d'évaluation
- Mesures Électriques PDFDocument11 pagesMesures Électriques PDFTriki Bilel67% (3)
- Apple 6 1Document2 pagesApple 6 1flockypro93Pas encore d'évaluation
- GW300 GW300: Guide de L'utilisateurDocument226 pagesGW300 GW300: Guide de L'utilisateurZanou ZinePas encore d'évaluation
- GuideDocument29 pagesGuideABDESSAMAD CHAHBIPas encore d'évaluation
- Mapping Uml Java FRDocument24 pagesMapping Uml Java FRChinh RoxPas encore d'évaluation
- Chapitre 3 Securisation Des Transactions Commerciales 10082022Document28 pagesChapitre 3 Securisation Des Transactions Commerciales 10082022alpha ASVPPas encore d'évaluation
- TD1 UmlDocument2 pagesTD1 UmlDanMarou IsmenePas encore d'évaluation
- ExercicesDocument9 pagesExercicesNabil SattePas encore d'évaluation
- Formation Complete V1.0Document28 pagesFormation Complete V1.0ChahinePas encore d'évaluation
- Netflow Nov 2011.ppsxDocument62 pagesNetflow Nov 2011.ppsxIbtissam OujeddouPas encore d'évaluation
- s1 - Stat1var - Cours - Rev 2019Document16 pagess1 - Stat1var - Cours - Rev 2019api-203629011Pas encore d'évaluation
- 010 - Developpement Et Déploiement D'application Gestion Ecole (Université de Faranah) PDFDocument1 page010 - Developpement Et Déploiement D'application Gestion Ecole (Université de Faranah) PDFAlpha MariamPas encore d'évaluation
- 0.7 - Introduction À L'analyse Du RéseauDocument17 pages0.7 - Introduction À L'analyse Du RéseauOnebagPas encore d'évaluation
- Formation Adobe Indesign CS4Document2 pagesFormation Adobe Indesign CS4MathieuVicotPas encore d'évaluation
- DOE Mini Projet 2Document12 pagesDOE Mini Projet 2Mohamed BoualiPas encore d'évaluation
- Recherche OpérationnelleDocument17 pagesRecherche OpérationnelleFouad Elhajji100% (1)
- MagretV8 Installation MagretDocument26 pagesMagretV8 Installation Magretmaxximiliano71Pas encore d'évaluation
- Chapitre 1 Rappels Sur La Modélisation UMLDocument90 pagesChapitre 1 Rappels Sur La Modélisation UMLZahia LoualiaPas encore d'évaluation
- Litera Hanitriniala LDocument101 pagesLitera Hanitriniala LIlyass AbdellaouiPas encore d'évaluation
- Rapport Metaheuristiques Optimisation CombinatoireDocument37 pagesRapport Metaheuristiques Optimisation CombinatoireAhmed Ben Rehayem100% (1)
- Examen de Compétences en Microsoft WordDocument4 pagesExamen de Compétences en Microsoft WordNACIBA KACIMIPas encore d'évaluation
- tp1 JDBC DaoDocument16 pagestp1 JDBC DaoWrida Chermiti Ep Hajji100% (1)
- StageM2 LSTM2020Document2 pagesStageM2 LSTM2020Richard Laurent LamahPas encore d'évaluation