Vous aimerez peut-être aussi
- Exercice - Dispositif de Levage Et Basculement - CorrigDocument6 pagesExercice - Dispositif de Levage Et Basculement - CorrigKarina Kapour80% (5)
- TP Robotique licEEADocument3 pagesTP Robotique licEEASi Mohamed RahiliPas encore d'évaluation
- Exo BoucherotMonophase 06Document1 pageExo BoucherotMonophase 06AsmrHani Zaza100% (1)
- MCC DynamiqueDocument8 pagesMCC Dynamiquebadretest100% (1)
- CH25Document5 pagesCH25Mohamed Saad BajjouPas encore d'évaluation
- Problèmes Avec La Transmission Automatique Audi SDocument4 pagesProblèmes Avec La Transmission Automatique Audi SRatin RakotoarisonPas encore d'évaluation
- Re ch2 PDFDocument20 pagesRe ch2 PDFيونس سليميPas encore d'évaluation
- Coursconvertisseursstatiques 1Document55 pagesCoursconvertisseursstatiques 1Amouin David WilfriedPas encore d'évaluation
- TP08 OnduleursDocument6 pagesTP08 OnduleursayoubPas encore d'évaluation
- TP Etk Ge 20 21Document17 pagesTP Etk Ge 20 21Ayman AssilaPas encore d'évaluation
- Tsti Ex04Document2 pagesTsti Ex04pPas encore d'évaluation
- 2-CAN CorrDocument8 pages2-CAN CorrSamire Maghafri100% (1)
- TD1-Réseaux MonophasésDocument5 pagesTD1-Réseaux Monophasésmalika elorfPas encore d'évaluation
- Université Djillali Liabès de Sidi Bel-Abbès Faculté de Génie Electrique Département D'electrotechnique Master 1: Machines ElectriquesDocument6 pagesUniversité Djillali Liabès de Sidi Bel-Abbès Faculté de Génie Electrique Département D'electrotechnique Master 1: Machines Electriquesabdeldjabbar14Pas encore d'évaluation
- TD OnduleursDocument3 pagesTD OnduleursAhmed LachematPas encore d'évaluation
- Chapitre N°1 Production Des Signaux SinusoidauxDocument11 pagesChapitre N°1 Production Des Signaux SinusoidauxAHMED HANAFIPas encore d'évaluation
- Pages de Livre-PHYSIQMINALE - SDocument5 pagesPages de Livre-PHYSIQMINALE - SHamza DickoPas encore d'évaluation
- EleDocument25 pagesEleRebahi FaresPas encore d'évaluation
- CH 3 Redressement Non CommandéDocument14 pagesCH 3 Redressement Non Commandécharletb toubiaPas encore d'évaluation
- Differents Strategies de Modulation PDFDocument27 pagesDifferents Strategies de Modulation PDFAbdelmalik BendaikhaPas encore d'évaluation
- Devoir Libre (19-12-2018)Document4 pagesDevoir Libre (19-12-2018)Riham abPas encore d'évaluation
- Thierry LEQUEU Travaux Dirigés MC-ET3 IUT de Tours - 2 Année Département GEIIDocument12 pagesThierry LEQUEU Travaux Dirigés MC-ET3 IUT de Tours - 2 Année Département GEIIIssam Boujnane100% (1)
- 09 Resume TGET Machine SynchroneDocument1 page09 Resume TGET Machine SynchroneTarak BenslimanePas encore d'évaluation
- Polycopie TPs Circuits & Signaux GE1 ESTADocument21 pagesPolycopie TPs Circuits & Signaux GE1 ESTASimo FidoudiPas encore d'évaluation
- Chap. 1 TTL CMOSDocument15 pagesChap. 1 TTL CMOSGhazi DayehPas encore d'évaluation
- TD1 Met303Document2 pagesTD1 Met303Luka MadridPas encore d'évaluation
- Technologie Des Circuits Integres I Intr PDFDocument6 pagesTechnologie Des Circuits Integres I Intr PDFaliPas encore d'évaluation
- Laplace InverseDocument2 pagesLaplace Inversehmdaoui anass100% (1)
- Mini Projet Électronique Analogique Et NumériqueDocument8 pagesMini Projet Électronique Analogique Et NumériqueNADA MOUCHAYIAPas encore d'évaluation
- دروس هندسة كهربائية للمبتدئين Cours Systeme ÉlectriqueDocument53 pagesدروس هندسة كهربائية للمبتدئين Cours Systeme ÉlectriqueEl ardaoui SalmaPas encore d'évaluation
- LECTRONIQUE DE PUISSANCE - ExercicesDocument11 pagesLECTRONIQUE DE PUISSANCE - ExercicesMarouan EladiPas encore d'évaluation
- Solution Emd Cem Uef21 2012Document3 pagesSolution Emd Cem Uef21 2012bousbia laiche HacenePas encore d'évaluation
- Electrotechnique: Chargé Du Cours M. Ognadon ASSOGBADocument89 pagesElectrotechnique: Chargé Du Cours M. Ognadon ASSOGBAIbrahim 32Pas encore d'évaluation
- Thème: Analyse Et Amélioration de La Qualité de L'énergie ÉlectriqueDocument97 pagesThème: Analyse Et Amélioration de La Qualité de L'énergie Électriquesarray rawdhaPas encore d'évaluation
- GEL-3006 2016 09 Numerique PDFDocument92 pagesGEL-3006 2016 09 Numerique PDFYolandeMenguePas encore d'évaluation
- Cours - MCC - IntroductionDocument8 pagesCours - MCC - IntroductionLa ReinaPas encore d'évaluation
- TD4 TTLDocument9 pagesTD4 TTLbriki ayoubPas encore d'évaluation
- Cours Redressement Comm PDFDocument6 pagesCours Redressement Comm PDFLLDODPas encore d'évaluation
- PARTIE I Rappel Sur Le Moteur À Courant ContinuDocument11 pagesPARTIE I Rappel Sur Le Moteur À Courant ContinuTop LyricsPas encore d'évaluation
- 3-Circuits RLC PDFDocument27 pages3-Circuits RLC PDFlucasPas encore d'évaluation
- Exercices AlternateurDocument13 pagesExercices AlternateurismailPas encore d'évaluation
- Ce Montage Ne Nécessite Pas de Transformateur: Redresseur À Double Alternance en Pont: Montage PD2 Tout ThyristorsDocument3 pagesCe Montage Ne Nécessite Pas de Transformateur: Redresseur À Double Alternance en Pont: Montage PD2 Tout ThyristorsMohamed MohamedPas encore d'évaluation
- L2 en Cours 8 AO Divers ImpDocument5 pagesL2 en Cours 8 AO Divers ImpHHFFHHFHFPas encore d'évaluation
- Tp2 Signal Fatiha HanaeDocument17 pagesTp2 Signal Fatiha HanaeHanae MenounyPas encore d'évaluation
- Harmoniques-Résumé CoursDocument7 pagesHarmoniques-Résumé CoursChanol NoupaPas encore d'évaluation
- Tavaux DirigésDocument2 pagesTavaux DirigésHakimAgüeroPas encore d'évaluation
- Bon TD Bases D'electroniqueDocument18 pagesBon TD Bases D'electroniqueArmand EssPas encore d'évaluation
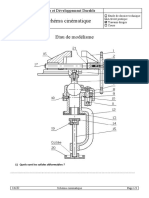
- Étau ModélismeDocument3 pagesÉtau ModélismeAdrien LupinPas encore d'évaluation
- ChapB15 Théorème de ShannonDocument2 pagesChapB15 Théorème de ShannonvarnicePas encore d'évaluation
- Examen SMP S Rattr 2017-Avec-CorrectionDocument5 pagesExamen SMP S Rattr 2017-Avec-CorrectionsimoPas encore d'évaluation
- TD-Alternatif Et PuissanceDocument24 pagesTD-Alternatif Et PuissanceBakr IbrahimiPas encore d'évaluation
- Fiche TD 03 Commade Electrique Master 2Document2 pagesFiche TD 03 Commade Electrique Master 2Motive -TechPas encore d'évaluation
- Chapitre1 Conversion AC DCDocument72 pagesChapitre1 Conversion AC DCÀLì BkPas encore d'évaluation
- These Zaamouche FaresDocument115 pagesThese Zaamouche FaresabfstbmsodPas encore d'évaluation
- CH II-Redresseurs Diodes Et ThyristorsDocument45 pagesCH II-Redresseurs Diodes Et ThyristorsAli Ayad100% (1)
- Eléments Semi-Conducteurs en Électronique de PuissanceDocument21 pagesEléments Semi-Conducteurs en Électronique de Puissancefarid saadPas encore d'évaluation
- TD HacheurDocument2 pagesTD HacheurSoufian JaafarPas encore d'évaluation
- Correction TD2 PDFDocument11 pagesCorrection TD2 PDFSaihi OussemaPas encore d'évaluation
- TD2 - AutomatiqueDocument1 pageTD2 - AutomatiqueSalah Eddine EL AbbadiPas encore d'évaluation
- TD Modelisation MCCDocument6 pagesTD Modelisation MCCcours importantPas encore d'évaluation
- TP HacheurDocument3 pagesTP Hacheursoufin elganiPas encore d'évaluation
- VHDLDocument121 pagesVHDLRafik OudaoudPas encore d'évaluation
- Tp2a Mesures EeaDocument5 pagesTp2a Mesures EeaSi Mohamed RahiliPas encore d'évaluation
- Actionneurs Des Matériaux Piézoélectriques Pour Des Commandes FutursDocument4 pagesActionneurs Des Matériaux Piézoélectriques Pour Des Commandes FutursSi Mohamed RahiliPas encore d'évaluation
- Tp2a Mesures EeaDocument5 pagesTp2a Mesures EeaSi Mohamed RahiliPas encore d'évaluation
- La BoiteDocument88 pagesLa BoiteKarim LeaderPas encore d'évaluation
- Corrigé Rattrapage BAC 2018 Sciences de Lingénieur STM PDFDocument10 pagesCorrigé Rattrapage BAC 2018 Sciences de Lingénieur STM PDFSi Mohamed RahiliPas encore d'évaluation
- RobInd Ch3p3 PDFDocument24 pagesRobInd Ch3p3 PDFSi Mohamed RahiliPas encore d'évaluation
- Exercices RedressementDocument23 pagesExercices Redressementarnaud2990% (10)
- Final 3Document131 pagesFinal 3Moad BenbroukPas encore d'évaluation
- RobInd Ch3p3 PDFDocument24 pagesRobInd Ch3p3 PDFSi Mohamed RahiliPas encore d'évaluation
- Final 3Document131 pagesFinal 3Moad BenbroukPas encore d'évaluation
- Exos RobotiqueDocument39 pagesExos RobotiqueZeyd Zizo50% (2)
- Canneblanche3 2013 FR PDFDocument92 pagesCanneblanche3 2013 FR PDFSi Mohamed RahiliPas encore d'évaluation
- Exos Probas Agreg14 CorrDocument15 pagesExos Probas Agreg14 CorrSi Mohamed RahiliPas encore d'évaluation
- Fiche Ordre12Document10 pagesFiche Ordre12Si Mohamed RahiliPas encore d'évaluation
- Fonc GeneDocument4 pagesFonc GeneSi Mohamed RahiliPas encore d'évaluation
- Exos Probas Agreg14 CorrDocument15 pagesExos Probas Agreg14 CorrSi Mohamed RahiliPas encore d'évaluation
- CV Rahili PDFDocument1 pageCV Rahili PDFSi Mohamed RahiliPas encore d'évaluation
- Ele002 Programmation CDocument248 pagesEle002 Programmation CSi Mohamed RahiliPas encore d'évaluation
- Ele002 Programmation CDocument248 pagesEle002 Programmation CSi Mohamed RahiliPas encore d'évaluation
- CV Rahili PDFDocument1 pageCV Rahili PDFSi Mohamed RahiliPas encore d'évaluation
- Exos Probas Agreg14 CorrDocument15 pagesExos Probas Agreg14 CorrSi Mohamed RahiliPas encore d'évaluation
- Fonc GeneDocument4 pagesFonc GeneSi Mohamed RahiliPas encore d'évaluation
- HoodDocument15 pagesHoodSi Mohamed RahiliPas encore d'évaluation
- Poly Robotique 2007 PDFDocument99 pagesPoly Robotique 2007 PDFWafa BenzaouiPas encore d'évaluation
- CV Rahili PDFDocument1 pageCV Rahili PDFSi Mohamed RahiliPas encore d'évaluation
- Varbio PDFDocument16 pagesVarbio PDFJean Christophe DangladesPas encore d'évaluation
- Regulation 2002Document18 pagesRegulation 2002Si Mohamed RahiliPas encore d'évaluation
- Deutz Katalog Części PDFDocument213 pagesDeutz Katalog Części PDFarturo91Pas encore d'évaluation
- Support de Cours Mécanique Des FluidesDocument26 pagesSupport de Cours Mécanique Des FluidesKhalil Ben SghaierPas encore d'évaluation
- Jacques Faure - Biomécanique Orthodontique - EDP SCIENCES (2011) PDFDocument132 pagesJacques Faure - Biomécanique Orthodontique - EDP SCIENCES (2011) PDFMahmoud HassounPas encore d'évaluation
- Spécifications Relatives À La Protection IncendieDocument10 pagesSpécifications Relatives À La Protection IncendieABELWALIDPas encore d'évaluation
- D2 GC2 SH Cop PfiDocument12 pagesD2 GC2 SH Cop PfiIleana RuvalcabaPas encore d'évaluation
- Mémoire Complet .PDF VentilationDocument95 pagesMémoire Complet .PDF VentilationBELGHANEM YoucefPas encore d'évaluation
- Poinçonnement Des Planchers-Dalles Avec Colonnes Superposées Fortement SollicitéesDocument446 pagesPoinçonnement Des Planchers-Dalles Avec Colonnes Superposées Fortement SollicitéesNetzoo FlixPas encore d'évaluation
- P - 4 Reservoir 500 Sureleve Zmra-Plan D'ensemble-100-CDocument1 pageP - 4 Reservoir 500 Sureleve Zmra-Plan D'ensemble-100-COumaima ArzikiPas encore d'évaluation
- Brochure TP MDFDocument13 pagesBrochure TP MDFrafik saPas encore d'évaluation
- FAST IntialeDocument1 pageFAST IntialeFatma BenbrahimPas encore d'évaluation
- 111ac-PF BW-ep8 SSNBDocument4 pages111ac-PF BW-ep8 SSNBmiquabo72Pas encore d'évaluation
- Corrigé - Série de TD 01Document13 pagesCorrigé - Série de TD 01ibtihal RNPas encore d'évaluation
- Le Rodage de SoupapesDocument6 pagesLe Rodage de SoupapesdonsallusPas encore d'évaluation
- Presentation 0cimentationDocument199 pagesPresentation 0cimentationberroui100% (1)
- Fiche Graissage Yamaha - XV 125 S Virago (1997 À 2000)Document1 pageFiche Graissage Yamaha - XV 125 S Virago (1997 À 2000)costePas encore d'évaluation
- Tabelele Cu Profile IPE, HEA, HEB, HEM PDFDocument18 pagesTabelele Cu Profile IPE, HEA, HEB, HEM PDFHerdean RemusPas encore d'évaluation
- Sismique Reflexion Et Refraction: Les Principes de BaseDocument47 pagesSismique Reflexion Et Refraction: Les Principes de Basedjeddi mabrouk86% (7)
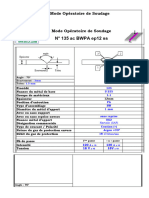
- 1035H03C2S PDFDocument8 pages1035H03C2S PDFMohamedPas encore d'évaluation
- Note de CalculDocument22 pagesNote de CalculsalimodzPas encore d'évaluation
- Chapitre I Rappels Et GénéralitésDocument17 pagesChapitre I Rappels Et GénéralitésFarinas KessouarPas encore d'évaluation
- TorsionDocument13 pagesTorsionMohammed Mammar KouadriPas encore d'évaluation
- Le Contrôle Visuel DDocument5 pagesLe Contrôle Visuel DMounir FrijaPas encore d'évaluation
- 3768 PropAmplifier 139-155 NG004Document12 pages3768 PropAmplifier 139-155 NG004WAPPPas encore d'évaluation
- Chapitre 5. Organes, Accessoires Et RobineterieDocument8 pagesChapitre 5. Organes, Accessoires Et RobineterieJe suis Je suisPas encore d'évaluation
- CH 4 Actions Mécanique de La CoupeDocument14 pagesCH 4 Actions Mécanique de La Coupearslane mustaphaPas encore d'évaluation
- CSA S16-01.27RTremblay050505 PDFDocument60 pagesCSA S16-01.27RTremblay050505 PDFLucas HoodPas encore d'évaluation
- Conception PS Des Batiments, IsBA TPDocument128 pagesConception PS Des Batiments, IsBA TPYuri BenchkriPas encore d'évaluation
- Diagramme Reel de Traction PDFDocument3 pagesDiagramme Reel de Traction PDFDeghboudj SamirPas encore d'évaluation