Académique Documents
Professionnel Documents
Culture Documents
Modelisation Des Mecanismes PDF
Modelisation Des Mecanismes PDF
Transféré par
pinamarkTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Modelisation Des Mecanismes PDF
Modelisation Des Mecanismes PDF
Transféré par
pinamarkDroits d'auteur :
Formats disponibles
Spé
ATS COURS
MODELISATION
DES
MECANISMES
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 1/38
Spé
ATS COURS
SOMMAIRE
MODELISATION DES MECANISMES ................................................................................................................................................................... 4
Introduction : ................................................................................................................................................................ 4
1. Modélisation d'un mécanisme existant : .............................................................................................................. 4
a. Modélisation des pièces mécaniques : .................................................................................................. 5
b. Classes d'équivalences : ......................................................................................................................... 5
c. Modélisation des contacts : ................................................................................................................... 7
2. Etude des liaisons :............................................................................................................................................... 7
a. Liaisons simples ou élémentaires .......................................................................................................... 7
b. Liaisons composées : ............................................................................................................................. 8
c. Torseur cinématique :............................................................................................................................ 8
d. Torseur transmissible par une liaison parfaite : .................................................................................... 9
e. Liaison parfaite : .................................................................................................................................... 9
3. Torseurs associés aux liaisons classiques : .......................................................................................................... 11
a. Réciprocité du torseur d'action mécanique transmissible et du torseur cinématique : ..................... 12
b. Forme particulière des torseurs cinématiques : .................................................................................. 14
4. Liaisons obtenues par l'ajout de composants : ................................................................................................... 16
a. Les coussinets : .................................................................................................................................... 16
b. Les roulements à billes, à rouleaux ou à aiguilles : .............................................................................. 16
c. Les butées à billes et à rouleaux : ........................................................................................................ 16
d. Les douilles à billes ou à rouleaux : ..................................................................................................... 16
e. Les vis à billes :..................................................................................................................................... 16
f. Les guidages à billes ou à rouleaux sur rails : ...................................................................................... 17
g. Les rotules lisses : ................................................................................................................................ 17
5. Représentations schématiques complémentaires : ............................................................................................ 17
a. Transmission par adhérence : roues à friction. ................................................................................... 17
b. Transmission par obstacles : Engrenages. ........................................................................................... 17
c. Transmission par obstacles : Pignon crémaillère................................................................................. 18
d. Transmission par obstacles : Roue et vis sans fin. ............................................................................... 18
e. Transmissions par lien flexible : pignons-chaîne. ................................................................................ 18
f. Transmissions par lien flexible : poulies-courroie. .............................................................................. 19
6. Schématisation : ................................................................................................................................................ 19
a. Graphe des contacts, des liaisons : ...................................................................................................... 19
b. Graphe de structure ou graphe des liaisons élémentaires : ................................................................ 21
c. Schéma cinématique minimal : ........................................................................................................... 21
d. Méthode pour représenter un schéma cinématique : ........................................................................ 22
7. Relation fondamentale de la théorie des mécanismes : ...................................................................................... 23
a. Mobilité (Principe de Maxwell et Kelvin) : ........................................................................................... 23
b. Relation fondamentale de la théorie des mécanismes : ..................................................................... 23
c. Système hyperstatique : ...................................................................................................................... 26
d. Application à la clé étau :..................................................................................................................... 27
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 2/38
Spé
ATS COURS
8. Chaînes de solides - Structure des mécanismes : ................................................................................................ 27
a. Chaînes ouvertes : ............................................................................................................................... 28
b. Chaîne fermée simple : ........................................................................................................................ 29
c. Chaîne cinématiques complexes : ....................................................................................................... 30
9. Liaisons cinématiquement équivalentes : ........................................................................................................... 31
a. Liaisons en parallèle : .......................................................................................................................... 31
b. Liaison en série : .................................................................................................................................. 35
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 3/38
Spé
ATS COURS
MODELISATION DES MECANISMES
Problématique :
Comment obtenir un modèle du mécanisme représenté sous forme de schéma (image symbolique
simplifiée) permettant différentes études :
Cinématique : - relations entrées-sorties en position et vitesse
- étude des mouvements
Statique : - relations entrées-sorties en efforts
- efforts de liaisons entre solides
- efforts dans les liaisons
Combinés : - Dynamique
- Energétique
Exemple : Nacelle élévatrice
INTRODUCTION :
Nous limiterons notre étude aux ensembles mécaniques constitués d’éléments rigides (solides) qui sont
en contact entre eux (assemblages).
Afin de permettre une bonne approche du mécanisme réel, on associe les pièces mécaniques à des
solides indéformables et, les liens entre elles, à des modèles de liaisons technologiques.
Mécanisme : - Un mécanisme est un agencement de pièces mécaniques reliées entre elles et conçu en vue de
réaliser une fonction déterminée.
- Un mécanisme est généralement conçu pour établir une relation particulière entre des
informations d’entrée qui sont des informations exercées par le milieu extérieur sur le
mécanisme, et des informations de sortie qui sont des informations exercées par le système sur
le milieu extérieur.
1. MODELISATION D'UN MECANISME EXISTANT :
Un mécanisme réel étant toujours très complexe, il est nécessaire, pour le comprendre et l’améliorer,
d’élaborer des modèles, afin de pouvoir lui appliquer les lois de la mathématique ou de la mécanique.
Cette modélisation permet de comprendre de façon fine le fonctionnement réel, d’en voir les limites et
de proposer des modifications sur le modèle afin de l’améliorer.
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 4/38
Spé
ATS COURS
Mécanisme Modélisation Modèle
réel amélioré
Modifications des
Concepts Etude critique du dispositions
simplificateurs modèle constructives
Mécanisme
réel amélioré
Lors de l'étude d'un mécanisme, la modélisation des pièces, des liaisons et des actions mécaniques va
permettre de déterminer les performances de ce mécanisme et son dimensionnement. La modélisation et la
schématisation cinématiques sont des moyens privilégiés pour expliquer le fonctionnement d’un mécanisme et
pour exprimer certaines caractéristiques grâce à un paramétrage adéquat.
a. Modélisation des pièces mécaniques :
Solides parfaits, indéformables ayant une géométrie bien définie.
Cette modélisation exclut naturellement les fluides, ainsi que les pièces qui subissent de grandes
déformations, comme les ressorts ou les courroies de transmission.
b. Classes d'équivalences :
Un mécanisme est un agencement de pièces mécaniques reliées entre elles par des liaisons. Ces pièces
liées entre elles par des assemblages permettent :
- une transmission d’effort avec mouvement c’est le cas des systèmes de transformation de mouvement
(système bielle manivelle, réducteur, came….)
- une transmission d’effort sans mouvement c’est le cas de mécanisme de positionnement (montages
d’usinage…)
Afin de simplifier la représentation du mécanisme et la schématisation qui en résulte, il faut commencer
par regrouper tous les éléments en contact n'ayant aucun mouvement relatif pendant l'usage du mécanisme à
l'exception des pièces déformables. Chaque groupe constitue une classe d'équivalence selon la relation "pas de
mouvement relatif" et sera affecté d'un même repère (celui de la pièce la plus représentative du groupe de par
sa forme ou sa fonction).
L'intitulé "groupe cinématiquement lié" pourra également être utilisé pour définir ces groupes.
En principe on commence par repérer tous les éléments qui sont liés au bâti et qui serviront de référence
pour l’étude du mécanisme.
Application à la clé étau :
La clé étau est un outil très polyvalent. Légère et facile à manier, elle est très appréciée des différents
corps de métiers (mécanicien, carrossier, …). On la caractérise par sa capacité maximale d’ouverture des
mors : 23 mm.
Cet outillage peut intervenir sur de la boulonnerie détériorée ou mal
calibrée grâce à une force de serrage de 6000 N, mais peut servir
également pour maintenir en pression afin de coller, riveter,
souder… Dotée de mors doux (lisse), la clé peut être utilisée
sur une boulonnerie fragile, par exemple en plastique.
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 5/38
Spé
ATS COURS
ሬሬሬԦ
𝑦1
A +
+ + + + +
𝑦Ԧ B E F ሬሬሬԦ
𝑥1
C D
3D
⨀ 𝑥Ԧ
𝑧Ԧ Identifiez les classes d'équivalence qui composent la clé étau :
Numéro d'article Nom de la pièce Quantité
1 Mors 1
2 Chape 1
3 Corps 1
4 Vis à droite 1
5 Poignée 1
6 Vis à gauche 1
7 Ecrou double 1
8 Rivet poignée 2
9 Rivet chape 2
10 Rivet corps 1
Cas particulier des éléments interposés roulants ou glissants : exemple du roulement.
Si on observe la constitution d'un roulement on se rend assez vite compte qu'au
lieu de simplifier le mécanisme on risque plutôt d'en compliquer la compréhension.
En effet, ces composants sont présents en grand nombre dans les mécanismes
et on peut difficilement imaginer d'affecter une classe d'équivalence à chacun des
constituants du roulement (bague intérieure, extérieure, billes, cage et parfois flasques).
Afin d'éviter le phénomène de corrosion sous charge, on monte toujours serrée
la bague qui tourne par rapport à la direction de la charge. Par conséquent la totalité
du roulement sera considéré comme faisant partie de la classe d'équivalence sur laquelle la bague est montée
serrée.
Corrosion sous charge : Quand un roulement est mis en charge, les forces résistantes des billes ont tendance à
freiner la bague qui tourne par rapport à la direction de la charge. S'il existe un jeu entre
cette bague et l'arbre ou le logement correspondant et qu'un mouvement relatif
apparaît, il y a décollement de la couche d'oxydation. Les particules d'oxydes de fer (ou
d'aluminium dans le cas de carter en alu) très abrasives viennent user l'arbre d'où
destruction rapide par prise de jeu.
Corrosion sous charge dû à la rotation d'une charge Fr par rapport à une bague :
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 6/38
Spé
ATS COURS
c. Modélisation des contacts :
Les contacts mécaniques entre pièces sont parfaits, sans jeu, les surfaces fonctionnelles sont
géométriquement exactes, sans frottement ni adhérence et sans déformations sous charge.
La modélisation des liaisons est basée sur l'analyse des surfaces de contact entre les groupes
cinématiquement liés.
2. ETUDE DES LIAISONS :
En construction mécanique pour étudier les mouvements d’un mécanisme, on construit des modèles
qui mettent en évidence les relations cinématiques entre ses constituants. C’est pourquoi il est intéressant de
modéliser les liaisons mécaniques, c’est à dire les possibilités de mouvements compatibles avec les surfaces de
contact.
Hypothèses:
La modélisation est faite sous les hypothèses suivantes :
- solides indéformables en mouvement relatif
- surfaces géométriquement parfaites et positionnement géométrique relatif parfait des
surfaces
- contact sans jeu et sans adhérence pour les pièces en mouvement relatif
- liaisons considérées comme permanentes: bilatéralité
Une liaison est bilatérale si elle peut transmettre au même point deux torseurs statiques opposés, liaisons
ponctuelles, linéaire rectiligne, appui plan sont bilatérales.
a. Liaisons simples ou élémentaires
On appelle liaison élémentaire de deux solides S1 et S2, tout contact mécanique de S1 et S2 s’effectuant
suivant deux surfaces parmi les surfaces élémentaires suivantes: surface plane, surface cylindrique, surface
sphérique.
Les différentes combinaisons donnent naissance à 6 liaisons simples.
Surface S1
Surface S2
Contact : Contact : Contact :
Liaison : Liaison : Liaison :
Contact : Contact :
Liaison : Liaison :
Contact :
Liaison :
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 7/38
Spé
ATS COURS
b. Liaisons composées :
On appelle liaison composée, toute liaison entre deux solides S1 et S2 s’effectuant au moyen d’au moins
deux liaisons élémentaires.
Essentiellement à cause des problèmes de fabrication, il est très rare de trouver des liaisons pivot,
glissière, hélicoïdale et sphérique à doigt réalisées de façon élémentaire.
Exemple de combinaisons possibles :
Appui-plan
Pivot
Pivot glissant
Appui-plan
Glissière
Appui-plan
Pivot glissant
Hélicoïdale
Ponctuelle
Sphérique
Sphérique à doigt
Linéaire rectiligne
D'autres combinaisons existent, celles présentées sont parmi les plus répandues.
c. Torseur cinématique :
On appelle torseur cinématique associé à la liaison de S1 et S2, le torseur noté S2 / S1 représentatif de
tout mouvement de S2 par rapport à S1 compatible avec la liaison des solides S1 et S2.
S / S x Vx
.x y .y z .z
S / S 2 1
y
Vy x
V Vx .x Vy .y Vz .z
2 1
A A ,S2 / S1
Vz x ,y ,z
A z
A
Si entre les deux solides n'existe aucune liaison, les six grandeurs ωx, ωy, ωz, Vx, Vy et Vz sont quelconques.
On dit que S2 possède six degrés de liberté par rapport à S1.
Si entre les solides existe une liaison mécanique, celle-ci va imposer "n" relations entre les grandeurs
ωx, ωy, ωz, Vx, Vy et Vz. On dit que S2 possède (6-n) degrés de liberté par rapport à S1.
Les relations les plus simples et les plus fréquentes correspondent à la nullité de certaines grandeurs
cinématiques ou à des proportionnalités ente ces grandeurs.
Définition : Le nombre de degrés de liberté entre deux solides liés est le nombre de paramètres cinématiques
indépendants à définir pour spécifier le torseur cinématique relatif entre ces deux solides.
Pour plus de simplicité, on appellera ce nombre Nc.
(Tableau des liaisons)
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 8/38
Spé
ATS COURS
d. Torseur transmissible par une liaison parfaite :
On appelle torseur transmissible par une liaison parfaite le torseur des actions de contact exercées par
le solide S1 sur le solide S2 dont la puissance est nulle dans tout mouvement de S2 par rapport à S1 compatible
avec la liaison des solides S1 et S2.
R S S X 12 L 12
X .x Y12 .y Z 12 .z
TS S 1 2
Y12 M12
12
1 2
M Z L .x M12 .y N12 .z
A 12
A A S1 S2 N 12 x ,y ,z
A 12
Définition : Le nombre de degrés de liaison entre deux solides liés est le nombre de paramètres statiques
indépendants à définir pour spécifier le torseur statiques relatif entre ces deux solides.
Pour plus de simplicité, on appellera ce nombre Ns.
e. Liaison parfaite :
On appelle liaison parfaite entre deux solides S1 et S2, toute liaison pour laquelle la puissance des efforts
intérieurs au système S1 S2 est nulle dans tout mouvement de S2 par rapport à S1 compatible avec la liaison.
On appelle puissance développée par les efforts exercés par S1 sur S2 dans le mouvement de S2 par
rapport à S1, le scalaire :
PS 1 S 2 A TS 1 S 2 A S 2 / S 1 torseurs exprimés au même point
RS S
S2 / S1
Soit : PS 1 S 2
1 2
RS 1 S 2 .VA ,S 2 / S 1 MA S 1 S 2 . S 2 / S 1
MA S 1 S 2
A V
A A ,S 2 / S 1
La puissance des efforts intérieurs au système S1 S2 est nulle lorsque le facteur de frottement des
surfaces en contact est nul.
Exemple du stylo à bille :
Modèle équivalent
S2 S2
S1 S1
𝑧Ԧ 𝑧Ԧ
ሬሬሬሬሬሬሬሬሬሬሬሬԦ
𝑉𝐴,𝑆2 Τ𝑆1 ሬሬሬሬሬሬሬሬሬሬሬሬԦ
𝑉𝐴,𝑆2 Τ𝑆1
𝑦Ԧ 𝑦Ԧ
A A
O 𝑥Ԧ O 𝑥Ԧ
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 9/38
Spé
ATS COURS
On donne le torseur statique de la liaison ponctuelle de normale (𝐴, 𝑧Ԧ) avec frottement (f coefficient de
frottement, la liaison est donc non parfaite) :
−𝑓. 𝑍12 0
{𝑇𝑆1→𝑆2 } = { 0 0} définir le torseur cinématique de la liaison puis définir les inconnues cinématiques
𝑍12 0 𝐴,𝑅
correspondants au problème.
Calculer la puissance développée par la liaison, à quoi correspond-elle ?
A quelle condition cette puissance est nulle ?
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 10/38
Spé
ATS COURS
3. TORSEURS ASSOCIES AUX LIAISONS CLASSIQUES :
LIAISON MOUVEMENTS POSSIBLES TORSEUR TORSEUR REPRESENTATION PLANE REPRESENTATION EN FORME
CINEMATIQUE TRANSMISSIBLE PERSPECTIVE PARTICULIERE
TX = 0
TY = 0
RX = 0
RY = 0
S / S
2 1
TS S
1 2
conservée en :
TZ = 0 RZ = 0
Rotations = 0
Translations = 0
A x ,y ,z A x ,y ,z
ENCASTREMENT D.d.l. = 0
TX = RX = S / S
2 1
TS S
1 2
conservée en :
TY = RY =
TZ = RZ =
Rotations =
Translations = A x ,y ,z A x ,y ,z
PIVOT
D.d.l. = Nc = Ns =
TX = RX = S / S
2 1
TS S
1 2
conservée en :
TY = RY =
TZ = RZ =
Rotations =
Translations = A x ,y ,z A x ,y ,z
GLISSIERE
D.d.l. = Nc = Ns =
TX = RX = S / S
2 1
TS S
1 2
conservée en :
TY = RY =
TZ = RZ =
Rotations =
Translations = A x ,y ,z A x ,y ,z
HELICOIDALE
D.d.l. = Nc = Ns =
TX = RX = conservée en :
TY = RY = S / S
2 1
TS S
1 2
TZ = RZ =
Rotations =
PIVOT-GLISSANT Translations = A x ,y ,z A x ,y ,z
D.d.l. = Nc = Ns =
TX = RX = S / S
2 1
TS S
1 2
conservée en :
TY = RY =
TZ = RZ =
Rotations =
Translations = A x ,y ,z A x ,y ,z
SPHERIQUE A DOIGT
D.d.l. = Nc = Ns =
TX = RX = S / S
2 1
TS S
1 2
conservée en :
TY = RY =
TZ = RZ =
Rotations =
Translations = A x ,y ,z A x ,y ,z
APPUI-PLAN
D.d.l. = Nc = Ns =
TX = RX = S / S
2 1
TS S
1 2
conservée en :
TY = RY =
TZ = RZ =
Rotations =
Translations = A x ,y ,z A x ,y ,z
SPHERIQUE
D.d.l. = Nc = Ns =
TX = RX = S / S1 TS S
1 2
conservée en :
TY = RY = 2
TZ = RZ =
Rotations =
Translations = A x,y,z A x ,y ,z
LINEAIRE RECTILIGNE
D.d.l. = Nc = Ns =
TX = RX = S / S
2 1
TS S
1 2
conservée en :
TY = RY =
TZ = RZ =
Rotations =
Translations = A x ,y ,z A x ,y ,z
LINEAIRE-ANNULAIRE
D.d.l. = Nc = Ns
TX = RX = S / S
2 1
TS S
1 2
conservée en :
TY = RY =
TZ = RZ =
Rotations =
Translations = A x ,y ,z A x ,y ,z
PONCTUELLE
D.d.l. = Nc = Ns =
Navigation : Torseur statique
Liaison hélicoïdale
Forme particulière
Liaisons avec composant
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 11/38
Spé
ATS COURS
a. Réciprocité du torseur d'action mécanique transmissible et du torseur cinématique :
Lorsqu’une liaison est parfaite, nous avons vu qu’il n’y a pas de phénomène de frottement entre les
surfaces de liaison; ceci implique notamment que la puissance développée par les actions mécaniques de liaison
est nulle et donc que le comoment des torseurs TS1 S2 et S2 / S1 est nul.
(Comoment = produit scalaire de deux torseurs)
R S1 S2
S2 / S1
TS S
S / S
M V
1 2 2 1
A A S1 S2 A A ,S2 / S1
Exprimons la puissance développée par les actions mécaniques transmissibles de la liaison S2 S1 :
RS1S2 .VA,S2 / S1 MAS1S2 .S2 / S1 0 soit :
0 X 12.Vx2 / 1 Y12.Vy2 / 1 Z 12.Vz2 / 1 L 12.x2 / 1 M12.y2 / 1 N12.z2 / 1 (a)
Comme les inconnues de liaison NS et les degrés de liberté de cette liaison NC sont indépendants, il
résulte de l’équation (a) que chacun des six monômes du premier membre doit être nul.
D’autre part, on observe que les deux termes qui composent un monôme ne peuvent pas être nuls
simultanément. En effet considérons le monôme X 12.Vx2 / 1 . Si X12 0 cela signifie que la résultante
RS1 S2 a une composante non nulle sur A, x et donc que le degré de liberté en translation suivant x n’existe
pas: par conséquent Vx2 /1 0 .
Réciproquement, si Vx2 /1 0 alors le degré de liberté en translation suivant x existe et compte tenu
du fait que la liaison est parfaite, il ne peut y avoir d’effort transmis suivant x , par conséquent X 12 0 .
Conclusion: il y a dans l’équation (a) un terme nul par monôme. Les deux torseurs TS1 S2 et S2 / S1
sont réciproques et NS + NC = 6.
Exemple 1 : Liaison pivot d'axe 𝒙
ሬԦ :
Nous avions trouvé la forme particulière en A A x du torseur cinématique :
S / S x 0
S / S 2 1
0
0 Nc = 1
V
2 1
A A ,S2 / S1 0
0 x ,y ,z
A
Exprimons au même point A et dans la même base x , y , z le torseur d'action mécanique transmissible
et ce de façon que le comoment de ces deux torseurs soit nul.
R S S 12
X 0
TS1 S2 1
2
Y12 M12 Ns =5
A
M
2
x ,y ,z
A S S
Z 12 N12
1
A
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 12/38
Spé
ATS COURS
Exemple 2 : Liaison rotule (ou sphérique) de centre A :
La forme particulière en A du torseur cinématique s'écrit :
S2 / S1
S2 / S1
Nc =
VA ,S / S
A x ,y ,z
A 2 1
Exprimons au même point A et dans la même base x , y , z le torseur d'action mécanique transmissible
et ce de façon que le comoment de ces deux torseurs soit nul.
R S1 S2
TS1 S2
Ns =
M A S S
A x ,y ,z
A 1 2
2
Retour sur les torseurs associés aux liaisons (Tableau des liaisons)
Retour sur la liaison hélicoïdale :
1
x Vx
On a défini le torseur cinématique de cette liaison par : S2 / S1 0
0
0 0 x ,y ,z
A
Quelle est la relation entre ωx et Vx ? Posons-nous la question en déplacement (on déroule l'hélice) :
Relation en x et θ :
x translation
θ rotation
On applique le théorème de Thalès :
x p p
donc x
.R 2R 2
Relation que l'on dérive par rapport au temps qui
p
x
nous donne la relation entre ωx et Vx :
dx p d p
soit Vx x
θ.R
dt 2 dt 2
2π.R
p
x x
2
Le torseur cinématique s'écrit donc : S2 / S1
0 0 p le pas de l'hélice. NC = 1
0 0
A x ,y ,z
X L
Qu'en est-il du torseur des efforts transmissibles : TS1 S2 Y M
Z N
A x ,y ,z
Pour une liaison parfaite, la puissance des efforts intérieurs est nulle : PS 2 / S1 S 2 / S1 TS1 S 2 0
Soit : PS2 / S1 R.VA ,S2 / S1 MA .S2 / S1
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 13/38
Spé
ATS COURS
p
X 2 X
Le torseur des efforts transmissibles s'écrit donc : TS 1 S 2
Y M
NS = 5
Z N
x ,y ,z
A
Retour sur les torseurs associés aux liaisons (Tableau des liaisons)
b. Forme particulière des torseurs cinématiques :
La forme particulière d’un torseur cinématique ou autre, est définie à partir des zéros des coordonnées
de ce torseur en un point, exprimées dans .
y
Considérons le torseur cinématique de la liaison pivot d’axe A, x .
S / S x 0
S / S 2 1
0 0
• x
V
2 1
A A ,S2 / S1 0 0 x ,y ,z A, z
A
Forme particulière d'une pivot d'axe x
En quels autres points de l’espace, ce torseur peut-il s’exprimer sous cette forme, c’est à dire avec ces
cinq zéros à cette place ?
Soit B(xB, yB, zB) un point, s’il existe, qui répond à cette question. Ecrivons le torseur S2 / S1 en B sachant
que BA xB .x yB .y zB .z .
Champ des vecteurs vitesse : VB,S2 / S1 VA ,S2 / S1 BA S2 / S1
VB,S2 / S1 (xB .x yB .y zB .z) x .x yB .x .z zB .x .y
S / S x 0
au point B s’écrit : S / S
Le torseur S2 / S1
2 1
0 z B .x
2 1
V 0
B B ,S 2 / S 1
B
y B .x x ,y ,z
Pour que la forme particulière de S2 / S1 soit conservée en B, il faut et il suffit que :
z B .x 0 et y B .x 0 x donc il faut que zB = 0 et yB = 0
Donc le point B à A, x .
Conclusion :
La forme particulière du torseur cinématique d’une liaison pivot d’axe A, x est conservée pour tout point B
A, x .
La recherche de la conservation de la forme particulière du torseur S2 / S1 peut se conduire de la même
façon pour les torseurs cinématiques ou statiques de toutes les liaisons.
Remarque : L’étude d’un système mécanique nécessite le choix d’un repère général dans lequel on peut
situer toutes les liaisons.
On lie par ailleurs à chaque liaison un repère local que l’on appelle également repère idéal.
L’origine A du repère idéal est le centre géométrique de la liaison. La notion de centre
géométrique désigne en fait un lieu des centres admissibles.
Ex : pour une liaison pivot d’axe A, y , ce lieu est la droite Ay
Dans ce repère local ou repère idéal, les torseurs d’efforts et cinématiques admettent leur forme
canonique. Ils ont un nombre de composantes non nulles minimal, c’est ce qui fait l’intérêt de ce choix pour le
calcul.
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 14/38
Spé
ATS COURS
x
Exemple : Liaison ponctuelle de normale A, x :
•
Considérons le torseur cinématique de la liaison ponctuelle de normale A, x y A, z
➢ Déterminer le lieu des points B ou la forme particulière du torseur cinématique est conservée.
Retour sur les torseurs associés aux liaisons (Tableau des liaisons)
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 15/38
Spé
ATS COURS
4. LIAISONS OBTENUES PAR L'AJOUT DE COMPOSANTS :
Certaines liaisons dans les mécanismes n’utilisent pas le principe de contact direct entre les deux solides.
Grâce à l’interposition d’éléments glissants ou roulants entre les solides, il est possible d’obtenir des
mouvements relatifs plus performants d’un point de vue énergétique.
a. Les coussinets :
Ils permettent d’obtenir un mouvement relatif entre deux solides modélisable par une liaison pivot ou
pivot glissant.
b. Les roulements à billes, à rouleaux ou à aiguilles :
La modélisation du roulement seul sera développé plus tard, pour le
moment nous considérerons que lorsque les roulements sont au moins au nombre
de deux entre les deux solides qu'ils sont modélisables par une liaison pivot.
Exemple d'éléments roulants :
c. Les butées à billes et à rouleaux :
Elles permettent d’obtenir un mouvement relatif entre deux solides modélisable par une liaison pivot.
d. Les douilles à billes ou à rouleaux :
Elles permettent d’obtenir un mouvement relatif entre deux solides
modélisable par une liaison pivot glissant.
e. Les vis à billes :
Elles permettent d’obtenir un mouvement relatif entre deux solides modélisable par une liaison
hélicoïdale.
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 16/38
Spé
ATS COURS
f. Les guidages à billes ou à rouleaux sur rails :
Ils permettent d’obtenir un mouvement relatif entre deux solides
modélisable par une liaison glissière.
g. Les rotules lisses :
Elles permettent d’obtenir un mouvement relatif entre deux
solides modélisable par une liaison sphérique.
5. REPRESENTATIONS SCHEMATIQUES COMPLEMENTAIRES :
a. Transmission par adhérence : roues à friction.
Schémas normalisés : Principe :
Deux roues cylindriques ou coniques sont en
contact linéique. L’adhérence au contact des deux
roues permet de transmettre le mouvement
d’entrée (roue menante 1) à la roue de sortie (roue
menée 2).
Pour un bon fonctionnement, il faut assurer un
roulement sans glissement en utilisant :
- un couple de matériaux avec un fort coefficient
d’adhérence ;
- un effort presseur entre les deux roues.
Utilisation :
Transmissions de faible puissance (petits appareils
portables comme des baladeurs), ou dans des
variateurs de vitesse.
Caractéristiques géométriques :
Les rayons des roues : R1 et R2.
b. Transmission par obstacles : Engrenages.
Schémas normalisés :
Utilisation : Transmissions de faible et forte puissances. Applications : de la montre à la boite de vitesse
automobile.
Caractéristiques géométriques : Les rayons primitifs des roues dentées : R1 et R2.
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 17/38
Spé
ATS COURS
c. Transmission par obstacles : Pignon crémaillère.
Schéma normalisé :
Utilisation : Transmissions de faible et forte puissances. Applications : direction de voiture.
Caractéristiques géométriques : Le rayon primitif de la roue dentée : R.
d. Transmission par obstacles : Roue et vis sans fin.
Schémas normalisés :
Utilisation : Transmission entre arbres à axes non concourants. Irréversibilité possible → sécurité anti-retour
(utile quand le récepteur peut devenir moteur : exemple : appareils de levage). Grand rapport de
réduction (entre 5 et 150).
Inconvénient : L’engrènement se fait avec beaucoup de glissement entre les dentures, donc usure, et rendement
faible (60%). La vis supporte un effort axial important.
Pour déterminer le rapport de transmission, on prendra le nombre de filets pour la vis.
e. Transmissions par lien flexible : pignons-chaîne.
Les liens flexibles sont particulièrement avantageux lorsqu’il s’agit de transmettre un mouvement de
rotation entre deux axes parallèles très distants.
Attention les roues ou poulies tournent dans le même sens (contrairement aux engrenages à contact
extérieur).
Avantages : Transmission de couples très importants. Aucun glissement.
Inconvénients : Bruyant et nécessite une lubrification.
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 18/38
Spé
ATS COURS
f. Transmissions par lien flexible : poulies-courroie.
La transmission de puissance par poulies-courroie se fait par l’intermédiaire de l’adhérence entre la
courroie et les poulies.
Avantages:
Rigidité en torsion assez faible, ceci permet leur utilisation lorsque
les axes des poulies ne sont pas parallèles (possibilité d’utiliser des
galets intermédiaires).
Solution économique.
Fonctionnement silencieux.
Amortissement des à-coups grâce à l'élasticité des courroies.
Inconvénients :
Matériaux des courroies non adaptés à des conditions difficiles
(température élevée par exemple).
Durée de vie limitée.
Nécessite une surveillance périodique en vue du remplacement de
la courroie.
Glissement (sauf pour courroie crantée).
6. SCHEMATISATION :
a. Graphe des contacts, des liaisons :
Le graphe des contacts est un outil descriptif qui permet de faire le bilan des solides et des contacts
entre les solides d’un mécanisme.
Etant donné que les liaisons sont déterminées par les possibilités de mouvements compatibles avec les
surfaces de contact, ces contacts vont donc être modélisés par des liaisons. D'où l'appellation graphe des liaisons.
Les solides sont placés aux sommets du polygone et les liaisons en sont les côtés. Les pièces en liaison
fixe sont regroupées sous un même solide numéroté (classe d'équivalence).
L1-4 4
1
L1-2 L3-4
L2-3
2 3 ..
.
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 19/38
Spé
ATS COURS
Application à la clé étau :
ሬሬሬԦ
𝑦1
A +
+ + + + + 3D
𝑦Ԧ B E F ሬሬሬԦ
𝑥1
C D
⨀ 𝑥Ԧ
𝑧Ԧ
A l'aide des classes d'équivalence déterminées précédemment tracer le graphe des contacts (graphe ou seuls des liens représentants un contact entre les groupes
sont tracés) :
Nous allons à présent étudier les surfaces en contact pour déterminer les liaisons, une fois fait, le graphe précédent deviendra un graphe des liaisons.
Liaisons Surface(s) Composant n°1 Surface(s) Composant n°2 Nature du ou des contacts Définition
ℓ1−3
ℓ1−5
ℓ5−6
ℓ6−7
ℓ7−4
ℓ3−4
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 20/38
Spé
ATS COURS
b. Graphe de structure ou graphe des liaisons élémentaires :
Le graphe de structure met en évidence les liaisons en série ou en parallèle.
L"1-4
1 4
L’1-4
L1-2
L3-4
L2-3
2 3 ..
.
c. Schéma cinématique minimal :
Le schéma cinématique est un outil de représentation fonctionnelle. Il met en évidence l’agencement
des différentes liaisons mécaniques d’un mécanisme.
Le schéma cinématique d'un mécanisme est une représentation géométrique plane ou spatiale du
graphe des liaisons.
Schéma cinématique minimal
Modélisation cinématique d’un
(représentation graphique du
mécanisme
modèle cinématique)
Pour construire ce schéma, on dessine les symboles normalisés des liaisons en respectant les
caractéristiques géométriques relatives des différentes liaisons (parallélisme, orthogonalité, perpendicularité,
coaxialité, contenant et contenu.). Les solides sont représentés par des traits continus qui relient les symboles
normalisés des liaisons.
En fonction des objectifs de l'étude, on pourra définir :
- Un graphe des liaisons et un schéma cinématique dans le cas d'une étude géométrique,
cinématique.
8 21
M
13
Graphe des liaisons Schéma cinématique
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 21/38
Spé
ATS COURS
- Un graphe de structure ou graphe des liaisons et efforts et un schéma d'architecture dans le
cas d'une étude des efforts dans les liaisons, en statique ou dynamique.
Maintien de la liaison
Décomposition de unilatérale
liaisons en série
Décomposition de
liaisons en parallèle
Graphe de structure Schéma d'architecture
d. Méthode pour représenter un schéma cinématique :
1. Choisir une représentation (spatiale ou plane) et l'orientation la plus représentative (si elle n'est pas
imposée).
2. Mettre en place le(s) repère(s) en respectant l'orientation choisie.
3. Placer les centres des liaisons en respectant la géométrie du mécanisme et ses proportions.
4. Représenter en leur centre chaque liaison en respectant son orientation et les contenant-contenu.
5. Relier les classes d'équivalences.
6. Ajouter la symbolique à la classe d'équivalence fixe.
Remarque : Afin d'améliorer la lecture (et la représentation) du schéma cinématique il est fortement
recommandé d'utiliser une couleur par classe d'équivalence.
Application à la clé étau :
Glissière (𝐴, 𝑥Ԧ) 3 Pivot (𝐷, 𝑧Ԧ)
1 6 7 4
Schéma
Pivot (𝐵, 𝑧Ԧ) 5
ሬሬሬԦ
𝑦1
𝑦Ԧ A + ሬሬሬԦ
𝑥1
+ + + + +
B E F
C D
⨀ 𝑥Ԧ
𝑧Ԧ Epinal
Lycée P. Mendès France
Modélisation des Mécanismes - Etudiant.docx 22/38
Spé
ATS COURS
7. RELATION FONDAMENTALE DE LA THEORIE DES MECANISMES :
a. Mobilité (Principe de Maxwell et Kelvin) :
Un solide supposé libre dans l’espace, a par rapport à un repère, 6 mobilités ou 6 degrés de liberté qui
sont : - 3 translations TX, TY, TZ (ces translations sont appelées : longitudinale, transversale,
verticale)
- 3 rotations RX, RY, RZ (roulis, tangage, lacet).
Si l’on supprime, par des liaisons, les 6 degrés de liberté d’une pièce, celle-ci occupe alors une position
bien précise et le repérage de la pièce est dit isostatique.
Nous savons que les 6 degrés de liberté peuvent être définis par les coordonnées d’un point plus trois
angles d’Euler.
Définition : On appelle degré de mobilité d’un mécanisme quelconque, le nombre de paramètres qui
décrivent le mouvement et qui sont indépendants.
Notations : mu = degré de mobilité utile du mécanisme. Il correspond au nombre de paramètres
indépendants servant à définir le mécanisme.
- Pour un mécanisme de positionnement comme par exemple un montage d’usinage, mu = 0
- Pour un mécanisme de transformation de mouvement, mu = 1.
- Pour un mécanisme de transformation de mouvement avec réglage, mu = 2.
mi = mobilités internes ne modifiant pas le fonctionnement du mécanisme.
z
Exemple : Mécanisme de transformation de mouvement :
• Si OA = cte le déplacement de la pièce 3 1 2
A
est fonction de θ uniquement mu = 1 O
• Supposons OA = r réglable le
déplacement de la pièce 3 est fonction de θ y
et r mu = 2
0
3
x
b. Relation fondamentale de la théorie des mécanismes :
Cette relation permet de déterminer si un mécanisme est isostatique ou non mais ne permet pas de
déterminer les actions dans les liaisons.
Remarque : Cette relation peut s’appliquer à une liaison particulière, a une partie de mécanisme ou à
l’ensemble d’un mécanisme que l’on a modélisé.
Notations : p = nombre de pièces sans compter le bâti.
nij = nombre de degré de liaison (nombre de composantes non nulles et indépendantes du
torseur des actions transmissibles de la liaison Lij).
CG = conditions géométriques. Chaque condition géométrique correspond à une translation ou
à une rotation par rapport au bâti ou référentiel.
h = représente le degré d’hyperstatisme du mécanisme.
- Si h = 0 le mécanisme est isostatique
- Si h > 0 le mécanisme est hyperstatique d’ordre h.
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 23/38
Spé
ATS COURS
Exemple 1 : Guidage en rotation surabondant :
Liaison pivot d’axe O1 ,x + liaison pivot glissant d'axe O2 ,x .
x
p = 1 , nij = 5 + 4 h = 4
1 Ce système est hyperstatique d’ordre 4.
O2
Solutions pour rendre le système isostatique :
- rendre 4 mobilités sans modifier la cinématique
y du système :
Conserver la liaison pivot glissant et remplacer la
O1 pivot par une ponctuelle de normale O1 ,x
- ou introduire des conditions géométriques CG
(démonstration page suivante)
O z
La liaison en O2 doit avoir son axe O2 ,i confondu avec l’axe de la liaison O1 qui est O1 ,x . Pour cela il
faut partant de la position O2 ,i effectuer deux rotations RZ et RY et deux translations TY et TZ pour que O2 ,i soit
confondu avec l’axe O1 ,x .
Etude statique :
1. Isolons l’arbre 1 :
X L
Le torseur des actions extérieures agissant sur l’arbre 1 supposé connu s'écrit : TExt1 Y M
Z N
O x ,y ,z
X 01 0
Le torseur transmissible par la liaison pivot en O1 s’écrit : T01 Y01 M01
Z N
O1 01 01 x ,y ,z
0 0
Le torseur transmissible par la liaison pivot glissant en O2 s’écrit : T01 Y02 M02
Z N
O2 02 02 x ,y ,z
2. L’équilibre de l’arbre 1 se traduit par (d'après le Principe Fondamental de la Statique) :
O1 T01 O1 T01 O1 TExt1 0
(1) X X 01 0
(2) Y Y02 Y01 0
(3) Z Z 02 Z 01 0
(4) L0 1 degré de mobilité = rotation d’axe O1 , x
(5) M M01 M02 0
(6) N N01 N02 0
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 24/38
Spé
ATS COURS
On a 4 équations (2), (3), (5) et (6) pour 8 inconnues système hyperstatique d’ordre 4 !
Rz
Ry
Les conditions géométriques sont données par : O2
y
- les équations (2) et (3) : translations Ty et Tz Ty x
- les équations (5) et (6) : rotations Ry et Rz.
Tz
La liaison en O2 doit avoir son axe confondu avec x
pour cela il faut 4 C.G. : Ry+Rz+Ty+Tz
O1
O
Exemple 2 : Guidage d’un arbre sur 3 paliers de façon à obtenir une liaison pivot :
On se propose de déterminer le degré d'hyperstatisme par une étude statique et de proposer deux types
de solutions pour rendre le système isostatique.
y
B
A
z
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 25/38
Spé
ATS COURS
Interprétation et conclusion :
En extrapolant les conclusions faites sur l'étude d'un solide à un mécanisme complet, on obtient, avec
les notations que l'on vient de voir, la relation fondamentale de la théorie des mécanismes (relation de
Tchebichev) :
➢ Dans le cas où aucune condition géométrique n'est donnée, on utilise la relation simplifiée :
n 6.p cm m h
ij u i
➢ Dans le cas où des conditions géométriques sont définies sur le système :
n CG 6.p m m h
ij u i
c. Système hyperstatique :
Si l’on veut s’assurer qu’un mécanisme est isostatique il ne faut pas se contenter de vérifier que h = 0
pour tout le mécanisme (c’est une condition nécessaire mais pas suffisante). Il faut que h=0 pour toutes les
parties du mécanisme ou sous ensemble ainsi que pour les liaisons complexes du mécanisme.
D’un point de vue mathématique, un mécanisme est hyperstatique si l’on ne peut pas calculer toutes
les inconnues de liaison à partir de l’écriture du Principe Fondamental de la Statique.
Ceci implique qu'en statique il est important de le déterminer avant de faire l'étude du système.
Pour le résoudre il faut imposer ces inconnues hyperstatiques.
D’un point de vue mécanique, on impose souvent à zéro ces inconnues hyperstatiques, ce qui revient à
rajouter des degrés de liberté au mécanisme.
Pour rendre un mécanisme isostatique on peut :
réduire l’amplitude des contacts c’est à dire par exemple passer d’un contact surfacique à un contact
linéique voire ponctuel. (autrement dit remplacer la liaison par une autre ayant plus de mobilités).
Exemple : contact plan (liaison appui-plan, Ns=3) réduit à un contact linéique (linéaire rectiligne, Ns=2)
rajouter des liaisons et donc des pièces. Ceci augmente les jeux potentiels et les possibilités de
déformation des pièces.
Exemple : Le joint d'Oldham sur le Maxpid.
Les Conditions Géométriques permettent de définir les tolérances géométriques sur les surfaces
fonctionnelles afin de conserver le système étudié tel quel. Au niveau de la relation de Tchebichev,
l'hyperstatisme peut se ramener à zéro, mais le système conserve en fait son hyperstatisme !
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 26/38
Spé
ATS COURS
Exemples de conditions géométriques :
Tolérances de
Tolérances de forme Tolérances d'orientation Tolérances de position
battement
Perpendicularité
Concentricité et
Battement total
Parallélisme
Localisation
Cylindricité
Battement
Inclinaison
Circularité
Rectitude
coaxialité
Symétrie
Planéité
simple
En conséquence, l’hyperstatisme, très souvent, coûte cher. A notre époque de compétition industrielle,
il faut être en mesure de choisir à coup sûr les assemblages, les surfaces de liaison en les optimisant. Pour cela
une analyse est indispensable.
d. Application à la clé étau :
Déterminer si le système est isostatique ou non ?
Proposer une solution pour rendre le système isostatique :
8. CHAINES DE SOLIDES - STRUCTURE DES MECANISMES :
Les graphes des liaisons, qui représentent la structure des mécanismes, peuvent se classer en trois
catégories, suivant qu'ils constituent entre les différents solides :
Chaîne ouverte Chaîne fermée Chaîne complexe
Une chaîne de solides 0, 1, 2… Une chaîne de solides 0, 1, 2… Une chaîne de solides 0, 1, 2…
est ouverte si les solides des est fermée si le solide initial est est complexe si elle comporte
extrêmes sont différents. le même que le solide final. plusieurs chaînes ouvertes ou
fermées.
Exemple : le robot :
Le premier solide étant le bâti Exemple : lève-barrière
et le dernier, la pince.
Exemple : plate forme
élévatrice
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 27/38
Spé
ATS COURS
a. Chaînes ouvertes :
x1 , x 2 z 0, z 1, z 2
Une chaîne ouverte est constituée de
solides assemblés en série. 3 C
a
Les chaînes ouvertes
permettent de concevoir une liaison non z 4 z3
réalisable directement.
Elles permettent D B
également de réaliser des x3
liaisons ponctuelles et 2
linéaires en contacts
x4
surfaciques. 4 E
Exemple : Manipulateur
pneumatique.
F
y3 , y 4 A
1
A l'aide de la composition des torseurs cinématiques, déterminer le
torseur cinématique {𝜐2/0 } et déduire la liaison équivalente
𝑂
correspondante :
xO
x1
O
0
y0
y1
Loi entrée-sortie d'une chaîne ouverte :
En général il suffira de connaître l'état des différents paramètres de positions pour trouver cette
relation.
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 28/38
Spé
ATS COURS
b. Chaîne fermée simple :
Une chaîne fermée simple est une chaîne ouverte dont les solides extrêmes ont une liaison.
Exemples: réducteurs à un étage, mécanisme de transformation de mouvement...
Application : attelle de rééducation
41 55
L14-2
53 41
L7-14 L2-16 53
L7-16
46 55
46
L46-53 : Liaison glissière
L53-41 : Liaison pivot
L41-55 : Liaison pivot
L55-46 : Liaison pivot
Calculer le degré d'hyperstatisme du mécanisme :
Proposez une solution pour rendre le mécanisme isostatique :
Loi entrée-sortie d'une chaîne fermée :
Les paramètres des liaisons étant liés les uns aux autres cette loi sera plus difficile à déterminer que
pour une chaîne ouverte.
La méthode la plus répandue est l'utilisation de la fermeture géométrique qui traduit, en s'appuyant sur
la géométrie du mécanisme, une somme vectorielle nulle. Voir cours Cinématique du Solide.
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 29/38
Spé
ATS COURS
c. Chaîne cinématiques complexes :
Une chaîne complexe est un mécanisme dont le graphe des liaisons est constitué de plusieurs chaînes
fermées imbriquées appelées cycles.
Exemples: réducteurs à plusieurs étages, trains épicycloidaux, pompes à pistons axiaux.
Application : Pompe à pistons axiaux
Graphe des liaisons et schéma cinématique pour 1 piston
18
23 1
G A
3
4 5 9
B
D E F
C
Le mécanisme est composé de 7 classes d’équivalence {1}, {18}, {23}, {3}, {4}, {5} et {9} d'où :
n = p+1 avec p = nombre de pièces sans compter le bâti.
Le nombre de cycles indépendants dans un graphe de structure est donné par la relation :
n 1
= nombre de cycles indépendants (correspond au nombre d’études à faire)
= nombre de liaisons
n = nombre de pièces avec le bâti.
Définition d’un cycle: Un cycle est une suite de classes d’équivalence et de liaisons en chaîne fermée telle
qu’on ne rencontre pas deux fois la même classe (sauf bien sur la classe début et la
classe fin qui sont identiques).
C’est un chemin fermé du graphe, ne passant pas deux fois par le même sommet.
La connaissance du nombre cyclomatique est intéressante car elle permet de définir le nombre minimal
de chaînes à étudier pour décrire le mécanisme.
Application : Pompe à pistons axiaux.
Cas avec un piston :
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 30/38
Spé
ATS COURS
Cas avec cinq pistons :
9. LIAISONS CINEMATIQUEMENT EQUIVALENTES :
On appelle liaison cinématiquement équivalente entre deux pièces, la liaison qui se substituerait à
l’ensemble des liaisons réalisées entre ces pièces ou sans pièce intermédiaire.
La liaison équivalente est la liaison qui a le même comportement que cette association de liaisons, c'est-
à-dire qui transmet la même action mécanique et qui autorise le même mouvement.
a. Liaisons en parallèle :
Il est fréquent dans un mécanisme qu’une pièce soit liée à une autre pièce de ce mécanisme par
l’intermédiaire de plusieurs liaisons simples.
Le but de l’étude qui suit est d’examiner l’isostatisme ou l’hyperstatisme ainsi que la mobilité qui vont
résulter de ces liaisons " en parallèle " et de définir, dans ce cas, la structure des torseurs statique et cinématique
résultants.
Exemple : Réducteur
• Schéma cinématique :
8 21
M
13
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 31/38
Spé
ATS COURS
• Etude fonctionnelle :
La fonction du sous-ensemble (arbre intermédiaire 6) est de transmettre la puissance de la roue 3 vers
le pignon 15, de telle façon que la fréquence de rotation 15 soit la même que la fréquence de rotation 3.
La loi d’entrée-sortie du mécanisme s’écrit: 15 = 3
Si le rendement du système est = 1, alors la loi d’entrée-sortie peut également se traduire par l’égalité
des couples: C15 = C3
Le graphe fonctionnel du mécanisme est :
Transmission de
Entrée roue 3 Puissance sans Sortie pignon 15
3 changement de
fréquence
• Etude mécanique :
Classes d’équivalence cinématiques :
{6} = { 1, 3, 5, 6, 2 (bague intérieure), 15, 16 (bague intérieure), 18 }
{13} = { 2 (bague extérieure), 13, 14, 16 (bague extérieure), 18 }
• Graphe des liaisons :
L 6-13
6 13
L6-13 = liaison pivot d’axe O, x
• Schéma cinématique minimal :
y
3 6 15
13
• Torseur cinématique associé à la liaison L6-13 :
x 613 0
6 / 13 0 0
0 0 x ,y ,z
O
• Torseur d’action mécanique transmissible de la liaison L6-13 :
X 136 0
T136 Y136 M136
Z N136 x ,y ,z
O 136
• Equilibre de 6 : ( 6 est supposé en mouvement de rotation en uniforme )
L’arbre 6 est en équilibre sous l’action :
- du torseur d’action mécanique transmissible par la liaison (13- 6) : T136
- d’un torseur d’action mécanique extérieure associé aux forces exercées sur la roue 3 par 8 et sur le
pignon 15 par 23, que nous noterons au point O par : TExt6
Nous pouvons donc écrire, d'après le principe fondamental de la dynamique pour un solide en mouvement de
rotation uniforme :
O T136 O TExt6 0
(1)
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 32/38
Spé
ATS COURS
Modélisation du roulement seul :
Nous avons vu précédemment que, lorsqu'ils étaient par paire, les roulements seraient associés à une
liaison pivot. C'est généralement vrai mais ce modèle ne nous permet de déterminer
avec précision les efforts dans les paliers qui sont utiles aux calculs de durée de vie de
roulement.
Le rotulage : Il existe toujours un jeu, aussi minime soit-il, entre les billes et les bagues.
Ce jeu a pour conséquence de permettre une rotation relative des
bagues, autour des axes perpendiculaires à l'axe principal du roulement.
Ces rotations sont appelées « rotulage ».
Roulement à une rangée de billes Roulement à deux rangées de billes
Le plus souvent le rotulage > 5’ Le plus souvent le rotulage <5'
Roulement à aiguilles ou à rouleaux Roulement à rotule (billes ou rouleaux)
Le plus souvent le rotulage <5' Rotule entre 2 et 4°
Remarques : Si l’angle maximal de rotulage (fourni par le constructeur) est >5’, alors les mouvements de
rotation autour des axes secondaires sont considérés possibles.
De plus, si les bagues du roulement ne sont pas arrêtées transversalement, alors le mouvement
de translation suivant la direction de l’axe principal est possible.
Exemple 1 : Exemple 2 :
Angle de rotulage du roulement <5’ Angle de rotulage du roulement <5’
Les deux bagues sont arrêtées en translation Une de deux bagues n’est pas arrêtée en translation
→ modélisable par une liaison pivot → modélisable par une liaison pivot glissant
Exemple 3 : Exemple 4 :
Angle de rotulage du roulement >5’ Angle de rotulage du roulement >5’
Les deux bagues sont arrêtées en translation Une de deux bagues n’est pas arrêtée en translation
→ modélisable par une liaison sphérique ou rotule → modélisable par une liaison linéaire annulaire
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 33/38
Spé
ATS COURS
• Etude technologique :
La liaison pivot L6-13 d’axe O, x est réalisée par l’intermédiaire de deux roulements à billes. D’après le
montage du dessin d’ensemble et en supposant que les angles de rotulage des roulements 2 et 16 sont suffisants
pour encaisser les déformations de flexion de l’arbre 6, nous pourrons modéliser le guidage en rotation de l’arbre
6 dans le carter 13 par deux liaisons élémentaires.
La liaison LC, réalisée par le roulement 16 dont les deux bagues sont épaulées, est une liaison rotule de
centre B.
La liaison LO, réalisée par le roulement 2 dont la bague intérieure est épaulée et la bague extérieure est
libre, est une liaison linéaire annulaire d’axe O, x .
• Schéma technologique de l'arbre intermédiaire 6 :
y
y
C z
O x
O
B B
OC .x
A A
• Relation entre les torseurs statiques :
Exprimons l’équilibre de 6 :
- 6 est en équilibre sous l’action du torseur d’action mécanique extérieure TExt6
- du torseur d’action mécanique transmissible associé à la liaison LO T'O136
- du torseur d’action mécanique transmissible associé à la liaison LC T"C136 .
L’équilibre de 6 se traduit par:
O TExt 6 O T'O136O T"C136 0 (2)
En identifiant les relations (1) et (2), il vient:
O T136 O T'O136 O T"C136
Cette relation traduit que les composantes d’action mécanique transmissibles entre 13 et 6 sont celles
qui sont transmissibles par les liaisons LO et LC.
Cette relation peut être généralisée et s’appliquer dans le cas ou entre les deux pièces il existe n liaisons
simples en parallèle.
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 34/38
Spé
ATS COURS
• Etude de la compatibilité cinématique :
Le torseur cinématique 6 / 13 associé à la liaison équivalente L6-13 est à priori quelconque et on le
notera en O dans la base x , y , z :
x Vx
6 / 13 y Vy
Vz x ,y ,z
O z
Le torseur cinématique 'O6 / 13 associé à la liaison linéaire annulaire d’axe O, x est :
Ox VOx
'O6 / 13 Oy 0
0 x ,y ,z
O Oz
Le torseur cinématique "C6 / 13 associé à la liaison rotule de centre C est :
Cx 0
"C6 / 13
Cy 0
0 x ,y ,z
C Cz
• Condition de compatibilité cinématique
Pour que la liaison équivalente L6-13 soit compatible avec les liaisons simples en parallèle qui la
composent, il faut que le torseur cinématique de la liaison équivalente, réduit au centre de chaque liaison simple
autorise la même mobilité que cette dernière.
Ceci implique que le torseur cinématique de la liaison équivalente est égal au torseur cinématique de
chaque liaison simple.
O
6 /13 O 'O6 /13O "C6 /13
En réduisant les torseurs en O, on obtient :
x Ox Cx Vx VOx 0
y Oy Cy Vy 0 .Cz Cz 0
z Oz Cz Vz 0 .Cy Cy 0
Le torseur équivalent s'écrit alors :
x 0
6 / 13 0 0 qui est le torseur d'une liaison pivot d'axe O, x
0 0
O x ,y ,z
b. Liaison en série :
Définition: Si une pièce n est liée à un bâti 0 par l’intermédiaire de n-1 pièces placées en série, et si ces n
pièces sont liées 2 à 2 par une liaison simple, alors ces n pièces et ces n liaisons constituent une
chaîne continue ouverte.
L1 L2 L3 Ln-1 Ln
0 1 2 n-1 n
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 35/38
Spé
ATS COURS
z2
z0, z1
Exemple :
y2
S2 L1-0 L2-1
x2
y1
0 1 2
A
x1 S1
L1-0 : liaison pivot d’axe O, z
O
x0 y0 L2-1 : liaison rotule de centre A
S0
• Relation entre les torseurs statiques :
Exprimons l’équilibre de 2 :
Le solide 2 est en équilibre sous l’action du torseur d’action mécanique extérieure TExt 2 et du torseur
d’action mécanique transmissible associé à la liaison L1-2 T12 on peut écrire:
A TExt2 A T12 0
ou A TExt2 A T12 (a)
Exprimons l’équilibre de 1 :
Le solide 1 est en équilibre sous l’action du torseur d’action mécanique transmissible associé à la liaison
L1-2 T21 et du torseur d’action mécanique transmissible associé à la liaison L1-0 T01 , on peut écrire
:
A T21 A T01 0
ou A T21 A T01 (b)
Exprimons l’équilibre de l’ensemble 1+2 :
Le système 1+2 est en équilibre sous l’action du torseur d’action mécanique extérieure TExt12 et du
torseur d’action mécanique transmissible associé à la liaison L1-0 T012 , on peut écrire :
T
A Ext 12
A T012 0 ou A TExt12A T012 (c)
Sachant que A T21 A T12 A TExt2 et T
A Ext 12
A TExt2, les 3 équations a, b et c permettent donc
d’écrire :
A TExt 2 A T21 A T01 A T012 soit :
A TExt2 A T21A T10 A T20
Le torseur d’action mécanique transmissible par la liaison équivalente L2-0 à l’ensemble des liaisons en
série L1 et L2 est égal au torseur d’action extérieure qui s’exerce sur la pièce d’extrémité 2.
Plus simplement on peut dire que si une composante d’un torseur statique d’une liaison Li est nulle, la
composante correspondante du torseur statique de la liaison équivalente est nulle.
Les composantes d’action mécanique transmissibles entre 0 et 2 sont donc celles qui sont transmissibles
simultanément par les liaisons L1 et L2.
Nous obtenons donc pour notre exemple :
X 10 L 10 X 21 0 X 20 0
T10 Y10 M10
et T21 Y21
0 soit : T20 Y20 0
Z Z 0
A 10
0 x ,y ,z Z
A 21
0
x A 20 x 0 ,y 0 ,z0
0 0 0 0 ,y 0 ,z0
Qui est le torseur d'une liaison rotule de centre A.
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 36/38
Spé
ATS COURS
• Etude de la compatibilité cinématique :
z2 L1-0 L2-1
z0, z1
0 1 2
y2
x2 S2
y1 L0-2
A
x1 S1
x Vx
On note : 2 / 0 y
O
Vy le torseur associée à la liaison
Vz x
x0 y0
A z 0 ,y 0 ,z0
équivalente L2-0
S0
La loi de composition des torseurs cinématiques des mouvements relatifs permis par chacune des
liaisons simples permet d’écrire:
A
2 / 0 A 2 / 1 A 1 / 0
Liaison L1-0 : pivot d’axe O, z 0 ou O, z1
0 0
1 / 0 0 0
le point de réduction (O,z0 )
z10 0
O z0
Liaison L2-1 : rotule de centre A.
x 21 0
2 / 0 y21
0
0
z21
A x ,y ,z
0 0 0
Les équations algébriques tirées de la composition des torseurs cinématiques sont au nombre de six. Il
y a quatre inconnues cinématiques indépendantes. ( x21 , y21 , z21 et z10 ).
x 0 x 21 Vx 0 0
y 0 y 21 Vy 0 0
z z 10 z 21 Vz 0 0
x 0
donc : 2 / 0 y 0
0 x
A z 0 ,y 0 ,z0
On retrouve le torseur d'une liaison rotule de centre A.
La mobilité cinématique utile mcu de la liaison équivalente est égale à 3 car il n’existe que 3 inconnues
cinématiques indépendantes dans l’expression de 2 / 0 , ce sont x, y, z.
• Mobilité cinématique mc de la chaîne ouverte
Définition: La mobilité cinématique mc de la chaîne continue ouverte est égale au nombre total d’inconnues
cinématiques Nc relatif à l’ensemble des liaisons simples de la chaîne.
mc Nc
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 37/38
Spé
ATS COURS
Pour le système que nous étudions:
mc = Nc = NcL1 + NcL2 = 3 + 1
Mobilité cinématique interne mci s’obtient par la relation
mc mcu mci
donc mci = mc - mcu = 4 - 3 = 1
Les mobilités internes mci d’une chaîne continue ouverte sont les degrés de liberté qui existent entre les
différentes pièces de la chaîne lorsque la pièce d’extrémité n est immobilisée par rapport au bâti 0.
Dans l’exemple qui nous concerne, la mobilité interne correspond à la rotation z10 .
En effet on avait: z z10 z21 supposons z 0 z10 z21
Application : Pompe hydraulique à piston axiaux.
➢ Déterminer la liaison équivalente L3-5.
➢ Déterminer les différentes mobilités :
Lycée P. Mendès France Epinal
Modélisation des Mécanismes - Etudiant.docx 38/38
Vous aimerez peut-être aussi
- 00 Exercices Diagrammes Bete A Cornes Et Pieuvre 1Document3 pages00 Exercices Diagrammes Bete A Cornes Et Pieuvre 1matozo60% (10)
- Cinématique Graphique Application - Commande Soupape Simple Et Avec CulbuteurDocument5 pagesCinématique Graphique Application - Commande Soupape Simple Et Avec CulbuteurbrunoduprePas encore d'évaluation
- 3 1 4 Schema Cinematique PDFDocument1 page3 1 4 Schema Cinematique PDFismailmebarkiPas encore d'évaluation
- CI8-TP Liaisons Schema Cine Portail - SetDocument4 pagesCI8-TP Liaisons Schema Cine Portail - SetSoufiane Daif0% (2)
- Exo2 - Composition Des MouvementsDocument6 pagesExo2 - Composition Des MouvementsToufikJalalEddinePas encore d'évaluation
- Table CoulissanteDocument1 pageTable Coulissantematozo100% (1)
- Exercice VérinDocument2 pagesExercice Vérinmatozo100% (4)
- TD EmbrayageDocument3 pagesTD Embrayagematozo83% (12)
- Dessin D'ens MotoréducteurDocument2 pagesDessin D'ens Motoréducteurmatozo75% (4)
- Troubles de L'articulation en Orthophonie, LangageDocument221 pagesTroubles de L'articulation en Orthophonie, LangageStella Papadopoulou80% (5)
- Marc Bonfils - CoursDocument167 pagesMarc Bonfils - CoursLauren ReynoldsPas encore d'évaluation
- Cisco ECNMDocument6 pagesCisco ECNMAnonymous k2SY4zdI3Pas encore d'évaluation
- Modelisation Des Mecanismes1Document23 pagesModelisation Des Mecanismes1Kamel BousninaPas encore d'évaluation
- Modelisation Des Liaisons MecaniquesDocument5 pagesModelisation Des Liaisons MecaniquesayatextPas encore d'évaluation
- DS2 PDFDocument8 pagesDS2 PDFAbdelilah Elmesbahi100% (1)
- Modélisation Cinématique Des MécanismesDocument8 pagesModélisation Cinématique Des MécanismesmounirgemPas encore d'évaluation
- TD 2 Liaisons Schéma CinématiqueDocument6 pagesTD 2 Liaisons Schéma CinématiqueNadhir MehellouPas encore d'évaluation
- Cours Theorie Des Mecanismes PDFDocument12 pagesCours Theorie Des Mecanismes PDFmaraghni_hassine7592100% (2)
- Corrigé TD 10 - Comportement Cinématique Des SystèmesDocument5 pagesCorrigé TD 10 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- FormualireDocument5 pagesFormualireAdil Hassani IdrissiPas encore d'évaluation
- TD 4 Loi Entrée Sortie Par Fermeture CinématiqueDocument2 pagesTD 4 Loi Entrée Sortie Par Fermeture CinématiqueAb DouPas encore d'évaluation
- TD Cinematique 9Document5 pagesTD Cinematique 9Jed MansouriPas encore d'évaluation
- Série Des Exercices Pour Les Chaines Des SolidesDocument6 pagesSérie Des Exercices Pour Les Chaines Des SolidesleePas encore d'évaluation
- CI4 TD64 C Table-BasculanteDocument3 pagesCI4 TD64 C Table-BasculanteAbdelali Yacoubi33% (3)
- DS1 StatiqueDocument5 pagesDS1 StatiqueYassinePas encore d'évaluation
- Réducteur À Arbre CreuxDocument10 pagesRéducteur À Arbre CreuxBouker Mohamed100% (1)
- Schéma CinématiqueDocument1 pageSchéma Cinématiquelephilo57Pas encore d'évaluation
- Schéma CinématiqueDocument23 pagesSchéma CinématiqueRuroni100% (1)
- TD 20 - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocument6 pagesTD 20 - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationibrahim rabbajPas encore d'évaluation
- Conception Touret À Meuler PDFDocument2 pagesConception Touret À Meuler PDFMohamed SaidiPas encore d'évaluation
- Festo ActionneurDocument42 pagesFesto ActionneurdidoPas encore d'évaluation
- Cours de Transmission de Puissance - 1 GMP3 - 14-12-19Document11 pagesCours de Transmission de Puissance - 1 GMP3 - 14-12-19michelPas encore d'évaluation
- Sciences de L'ingénieurDocument2 pagesSciences de L'ingénieurGuy YgalPas encore d'évaluation
- Max PIDDocument19 pagesMax PIDmarinmikaelPas encore d'évaluation
- Cours DC3 - M2 - Modéliser Et Schématiser Le Comportement Cinématique PDFDocument17 pagesCours DC3 - M2 - Modéliser Et Schématiser Le Comportement Cinématique PDFMOHSSINE KOUSSPas encore d'évaluation
- DS Micromoteur - Compresseur Clim CORRDocument1 pageDS Micromoteur - Compresseur Clim CORRAdil Hassani IdrissiPas encore d'évaluation
- 1-Le Schéma Cinématique Des MécanismesDocument8 pages1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyPas encore d'évaluation
- Cours 10Document4 pagesCours 10BalalaŇaŖîfPas encore d'évaluation
- Exercices Mécanique GénéraleDocument295 pagesExercices Mécanique GénéraleAmira Zarglayoun100% (6)
- Sujet Partie1 PDFDocument6 pagesSujet Partie1 PDFDODOHICHAMPas encore d'évaluation
- Décrire Un Système Par Une Chaîne Fonctionnelle: Exercice 1: Prothèse Transtubiale ActiveDocument8 pagesDécrire Un Système Par Une Chaîne Fonctionnelle: Exercice 1: Prothèse Transtubiale Activebijhou mcPas encore d'évaluation
- CI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxDocument6 pagesCI03 TD09 Sujet - Modéliser Le Comportement Cinématique Des Trains ÉpicycloïdauxIsmail El MoufakirPas encore d'évaluation
- 3-Schématisaton Et Analyse Cinématique PDFDocument15 pages3-Schématisaton Et Analyse Cinématique PDFhamzaPas encore d'évaluation
- TD Serre JointDocument2 pagesTD Serre JointKamel BousninaPas encore d'évaluation
- TD Construction Mécanique 2Document7 pagesTD Construction Mécanique 2Wendingoundi NikiemaPas encore d'évaluation
- Ipeit Ex1 2012Document3 pagesIpeit Ex1 2012JaamesPas encore d'évaluation
- Chaines Cinematiques - Prof PDFDocument7 pagesChaines Cinematiques - Prof PDFGenie Meca0% (1)
- Chapitre1 - Liaisons MécaniquesDocument9 pagesChapitre1 - Liaisons MécaniquesZakaria BaidPas encore d'évaluation
- GM Activ 3scTDocument288 pagesGM Activ 3scTabderahmenbenammar29Pas encore d'évaluation
- Transmission de PuissanceDocument19 pagesTransmission de Puissancesayr0sPas encore d'évaluation
- Chaines de Solides - Comportement CinématiqueDocument8 pagesChaines de Solides - Comportement CinématiqueAbdelali YacoubiPas encore d'évaluation
- ENONCE TP Statique CRIC FILAIRE MECA3D V2012 PDFDocument4 pagesENONCE TP Statique CRIC FILAIRE MECA3D V2012 PDFSCORSAM1Pas encore d'évaluation
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzPas encore d'évaluation
- Les Liaisons Non Permanentes (ASSEMBLAGES) CH 04 1er Année GPLDocument14 pagesLes Liaisons Non Permanentes (ASSEMBLAGES) CH 04 1er Année GPLTom BriderPas encore d'évaluation
- TD 18 - Lois Entrée-Sortie en Position Et en VitesseDocument6 pagesTD 18 - Lois Entrée-Sortie en Position Et en Vitessebhs channelPas encore d'évaluation
- RDM BTS AF Traction CompressionDocument4 pagesRDM BTS AF Traction CompressionJean-Pierre Peffier0% (1)
- Cinématique Du SolideDocument20 pagesCinématique Du Solidemaraghni_hassine7592100% (1)
- TD Conception2 - RévisionDocument6 pagesTD Conception2 - RévisionBokou KhalfaPas encore d'évaluation
- TD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDocument4 pagesTD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDrisse Achar60% (5)
- TPE Arbres de TransmissionDocument4 pagesTPE Arbres de TransmissionÉliePas encore d'évaluation
- TD 16 - Liaisons - Schéma CinématiqueDocument4 pagesTD 16 - Liaisons - Schéma Cinématiquebhs channelPas encore d'évaluation
- Transmission de Puissance Avec Transformation de MouvementDocument19 pagesTransmission de Puissance Avec Transformation de MouvementPhil ČhrýstaĺPas encore d'évaluation
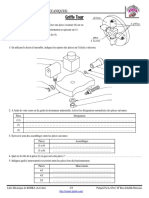
- Griffe de Tour PDFDocument3 pagesGriffe de Tour PDFAdramé AdraméPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- Exercice Transmission HydrauliqueDocument1 pageExercice Transmission Hydrauliquematozo50% (2)
- Exercice Pompe HydrauliqueDocument2 pagesExercice Pompe HydrauliquematozoPas encore d'évaluation
- Mini Projet Transmission HydrauliqueDocument1 pageMini Projet Transmission HydrauliquematozoPas encore d'évaluation
- Receuille D'exeercices de Transmission HydrauliqueDocument10 pagesReceuille D'exeercices de Transmission Hydrauliquematozo100% (1)
- Exercice Transmission HydrauliqueDocument1 pageExercice Transmission Hydrauliquematozo50% (2)
- Examen de TACDocument4 pagesExamen de TACmatozoPas encore d'évaluation
- ProgrammeDocument4 pagesProgrammematozoPas encore d'évaluation
- APPLICATIONDocument1 pageAPPLICATIONmatozo100% (1)
- Devoir RattrapageDocument1 pageDevoir RattrapagematozoPas encore d'évaluation
- Chap. 0 - OPT 1Document16 pagesChap. 0 - OPT 1matozoPas encore d'évaluation
- Abaque Limite D'endurenceDocument1 pageAbaque Limite D'endurencematozoPas encore d'évaluation
- Exercice Chaine 2Document1 pageExercice Chaine 2matozoPas encore d'évaluation
- Alésage PDFDocument12 pagesAlésage PDFmatozoPas encore d'évaluation
- Créativité Et Innovation en Projet Technique PDFDocument28 pagesCréativité Et Innovation en Projet Technique PDFmatozoPas encore d'évaluation
- Barriere AutomatiqueDocument3 pagesBarriere AutomatiquematozoPas encore d'évaluation
- Examen Final 2017 2ème SessionDocument1 pageExamen Final 2017 2ème Sessionmatozo0% (1)
- TechnoDocument1 pageTechnomatozoPas encore d'évaluation
- Cours CM1 2014 2015Document172 pagesCours CM1 2014 2015matozo100% (3)
- Accouplement GénéralitésDocument4 pagesAccouplement Généralitésmatozo100% (1)
- Rapport StageDocument3 pagesRapport StagematozoPas encore d'évaluation
- Usinage Par AbrasionDocument1 pageUsinage Par AbrasionmatozoPas encore d'évaluation
- Chap3 Cinematique Du Solide OkDocument16 pagesChap3 Cinematique Du Solide OkmatozoPas encore d'évaluation
- Bilan Thermique Simplifié-1Document26 pagesBilan Thermique Simplifié-1Hamza SafiPas encore d'évaluation
- BusinessDocument15 pagesBusinessKawtar HachimyPas encore d'évaluation
- Aperam L Acier Inoxydable Et La Corrosion FR PDFDocument6 pagesAperam L Acier Inoxydable Et La Corrosion FR PDFgharsallah mounaPas encore d'évaluation
- Chap3 Formalisme FADocument45 pagesChap3 Formalisme FAChaima BelhediPas encore d'évaluation
- Water Still French Spanish ManualDocument9 pagesWater Still French Spanish ManualGabby Salomé100% (2)
- Guide Deshumidification 2012Document24 pagesGuide Deshumidification 2012ibtissam aqPas encore d'évaluation
- MR 96267Document203 pagesMR 96267Yahya Ben WalidPas encore d'évaluation
- PJ 26 Rapport de Vérification Des Installations ÉlectriquesDocument64 pagesPJ 26 Rapport de Vérification Des Installations ÉlectriquesenagnonPas encore d'évaluation
- SMP 3 PDFDocument60 pagesSMP 3 PDFsoufyane el ouahabiPas encore d'évaluation
- International Business Machines CorporationDocument2 pagesInternational Business Machines CorporationalzahradakirPas encore d'évaluation
- SES 6 at 40Document9 pagesSES 6 at 40Jorge Luis SalazarPas encore d'évaluation
- Behringer Xenyx 1202fx Mode D Emploi FR 61428Document14 pagesBehringer Xenyx 1202fx Mode D Emploi FR 61428PierrePas encore d'évaluation
- 14-Guide Sur La Securite Dans Les Chantiers de BâtimentDocument22 pages14-Guide Sur La Securite Dans Les Chantiers de BâtimentBENSAAOUD0% (1)
- Pmtic Creation Excel CalculerDocument10 pagesPmtic Creation Excel CalculerSimbé ElankourPas encore d'évaluation
- La Puissance Electrique Exercices Non Corriges 4Document1 pageLa Puissance Electrique Exercices Non Corriges 4batoul ridaPas encore d'évaluation
- Internet Par Satellites 1Document2 pagesInternet Par Satellites 1AdouaneNassimPas encore d'évaluation
- Rapport de Stage À La BMCE Bank (Centre D'affaire Fès) : Ecoles Des Hautes Etudes 2 Année Commerciale Commerce HECDocument28 pagesRapport de Stage À La BMCE Bank (Centre D'affaire Fès) : Ecoles Des Hautes Etudes 2 Année Commerciale Commerce HECchristianmakossoPas encore d'évaluation
- GUEBLI - IMED EDDINE - Automatique.. - Automatique Et Informatique IndustrielleDocument51 pagesGUEBLI - IMED EDDINE - Automatique.. - Automatique Et Informatique IndustrielleSafaa BenPas encore d'évaluation
- 1-Foisennement de SableDocument7 pages1-Foisennement de SableHamza HalhouliPas encore d'évaluation
- Synthèse Bibliographique: Le Modèle Numérique de Terrain de Haute Résolution, Ses Erreurs Et Leur PropagationDocument15 pagesSynthèse Bibliographique: Le Modèle Numérique de Terrain de Haute Résolution, Ses Erreurs Et Leur PropagationJimmy ANDRIATSIMIALINAPas encore d'évaluation
- Partie 1 - Organe DéprimogèneDocument34 pagesPartie 1 - Organe DéprimogèneDAHRAOUI Mohamed Riad100% (7)
- Antenne Relais Document D Information Du Ministere Mars 2013 PDFDocument4 pagesAntenne Relais Document D Information Du Ministere Mars 2013 PDFNestor GrahPas encore d'évaluation
- Devis d202400001 Rox Toiture de L EstDocument1 pageDevis d202400001 Rox Toiture de L EstSamy HaddadouPas encore d'évaluation
- Cours de Route 2006 PDFDocument82 pagesCours de Route 2006 PDFBouraida El YamouniPas encore d'évaluation
- TD TmoemDocument12 pagesTD TmoemAhmed GhribiPas encore d'évaluation
- Lettre, Carte Postale, MelDocument7 pagesLettre, Carte Postale, Melmarta2g277Pas encore d'évaluation
- Fiche Technique HSA 2010 10Document6 pagesFiche Technique HSA 2010 10Bastien GuilbonPas encore d'évaluation