Vous aimerez peut-être aussi
- Grue MobileDocument21 pagesGrue MobileSaidiJalelPas encore d'évaluation
- Epure Darret Des BarresDocument9 pagesEpure Darret Des Barresoumaima el ftouh slassiPas encore d'évaluation
- Chapitre12 Ferraillage Complet D'une PoutreDocument45 pagesChapitre12 Ferraillage Complet D'une PoutreAhmed Skendraoui50% (4)
- 10 Accouplements TemporairesDocument20 pages10 Accouplements Temporaireszouhour brahmi100% (1)
- Chapitre 1 Generalité Sur Les TurbomachinesDocument10 pagesChapitre 1 Generalité Sur Les TurbomachinesRana HnaPas encore d'évaluation
- BAELDocument5 pagesBAELAli AliPas encore d'évaluation
- Accouplements Embrayage ApplicationsDocument5 pagesAccouplements Embrayage ApplicationsdjalikadjouPas encore d'évaluation
- 50498fb55ca38 PDFDocument23 pages50498fb55ca38 PDFAhmedPas encore d'évaluation
- Presentation Verrouillage ContacteurDocument48 pagesPresentation Verrouillage ContacteurZAKAR1180100% (1)
- Changement D'appareils D'appuiDocument26 pagesChangement D'appareils D'appuitidus00_30% (1)
- Extrait Du Livre PDFDocument10 pagesExtrait Du Livre PDFSido BouhalPas encore d'évaluation
- Guidage en Rotation Final CourDocument12 pagesGuidage en Rotation Final CourOmar ChahirPas encore d'évaluation
- Suspension VTTDocument4 pagesSuspension VTTmasteratsii100% (1)
- Porte de Garage Sectionnelle Blanche Motorisee L X H CM X Ep MM Polygrain 1148280 AssemblysheetDocument20 pagesPorte de Garage Sectionnelle Blanche Motorisee L X H CM X Ep MM Polygrain 1148280 Assemblysheetjeremy solerPas encore d'évaluation
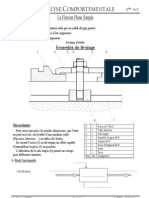
- La Flexion Plane Simple (Cours 3 SCT)Document4 pagesLa Flexion Plane Simple (Cours 3 SCT)MIMFS92% (12)
- TpChaineSolides CorrigéDocument9 pagesTpChaineSolides CorrigéImen HammoudaPas encore d'évaluation
- Helice 1Document20 pagesHelice 1Hicham RachifPas encore d'évaluation
- DS StatiqueDocument2 pagesDS StatiqueAdil Hassani Idrissi100% (1)
- Vdocuments - MX - Bombas de Pedrollo de 05 HP PDFDocument24 pagesVdocuments - MX - Bombas de Pedrollo de 05 HP PDFErickPas encore d'évaluation
- j2 36 2 Epas Dynamique EnnonceDocument5 pagesj2 36 2 Epas Dynamique Ennonceakarne YounessPas encore d'évaluation
- 121 1 Mini Concours Sup EnonceDocument9 pages121 1 Mini Concours Sup EnoncezakPas encore d'évaluation
- Dépose Des Patins - 55-2-21-M95 FR - 1.0.0Document8 pagesDépose Des Patins - 55-2-21-M95 FR - 1.0.0mecatedPas encore d'évaluation
- Ouikassi MP Psi Tsi GMDocument29 pagesOuikassi MP Psi Tsi GMJeyar medPas encore d'évaluation
- TP Ef Axe ContreficheDocument4 pagesTP Ef Axe Contreficheمحمد الأمين شرفاويPas encore d'évaluation
- DM RDM Bras TelescopiqueDocument5 pagesDM RDM Bras TelescopiqueMohamed El HajjamPas encore d'évaluation
- DM05 - Barrière Sympact - SujetDocument6 pagesDM05 - Barrière Sympact - SujetAyman Ebn taouaitPas encore d'évaluation
- 08 Géométrie Des TrainsDocument2 pages08 Géométrie Des TrainsRoman BarcenasPas encore d'évaluation
- Chap4 BA1Document15 pagesChap4 BA1Yassine GhanmiPas encore d'évaluation
- BoureuseDocument11 pagesBoureuseNoureddine SlimaniPas encore d'évaluation
- Flexion Plane SimpleDocument4 pagesFlexion Plane SimpleYous lbPas encore d'évaluation
- F 1332112Document23 pagesF 1332112qaadilPas encore d'évaluation
- (PFS) (TD) Echelle de PompierDocument2 pages(PFS) (TD) Echelle de PompierLoic StevenPas encore d'évaluation
- Grue MobileDocument21 pagesGrue MobilehatemPas encore d'évaluation
- JNGG 2012 445Document8 pagesJNGG 2012 445Faci AliPas encore d'évaluation
- TD CI - 001b (Scie Sauteuse) Analyse Liaisons - V 2022.0Document8 pagesTD CI - 001b (Scie Sauteuse) Analyse Liaisons - V 2022.0louna yunaPas encore d'évaluation
- C-SERIES WheelbarrowDocument2 pagesC-SERIES WheelbarrowmomtchilPas encore d'évaluation
- Chap4 Leçoc 3 Transformation Bielle Manivelle 4tech-12Document12 pagesChap4 Leçoc 3 Transformation Bielle Manivelle 4tech-12ezzinePas encore d'évaluation
- Project OrthogoDocument15 pagesProject OrthogoAhlem Rmida Ben HmidaPas encore d'évaluation
- Théorie Aéro HydroDocument111 pagesThéorie Aéro Hydroaurl.delpechPas encore d'évaluation
- 1-Liaisons en Parallèles: X Z Z XDocument12 pages1-Liaisons en Parallèles: X Z Z XLarbi Elbakkali100% (1)
- DS3 2Document6 pagesDS3 2ulrich borel tchinda melongPas encore d'évaluation
- Peugeot 206 Manual de Taller8Document1 pagePeugeot 206 Manual de Taller8Sergio Hernandez100% (1)
- 007761041Document1 page007761041elkamous youssefPas encore d'évaluation
- MEC-M2-AUX 1.1 - Ligne D'arbre Et PropulsionDocument20 pagesMEC-M2-AUX 1.1 - Ligne D'arbre Et PropulsionMed Aht100% (1)
- BTS 2005 - StatiqueDocument4 pagesBTS 2005 - Statiquebarg lilPas encore d'évaluation
- Bambisol Balancelle Electro 3159059048581 1Document8 pagesBambisol Balancelle Electro 3159059048581 1Jessica LouisePas encore d'évaluation
- TD Schema Cine Tapis de CourseDocument4 pagesTD Schema Cine Tapis de CourseYoussef Alaoui100% (1)
- Exo 6 Camion PompierDocument2 pagesExo 6 Camion PompierMama Samba SALL100% (1)
- TD5 Table ElevatriceDocument3 pagesTD5 Table Elevatriceyoussef ettaouil2005Pas encore d'évaluation
- DS 2Document10 pagesDS 2Ttabi VeydiPas encore d'évaluation
- 06 PDFDocument2 pages06 PDFjoker63000Pas encore d'évaluation
- Exo 4 Presse A Genouillere Et 4 BarresDocument4 pagesExo 4 Presse A Genouillere Et 4 BarresDABAKH LDEEBOYPas encore d'évaluation
- TD N°3Document6 pagesTD N°3nadaPas encore d'évaluation
- Poulie Et CourroieDocument4 pagesPoulie Et CourroieSkander CristoPas encore d'évaluation
- Flambage Des Fonds 15033919Document22 pagesFlambage Des Fonds 15033919ptonnelPas encore d'évaluation
- Exo 6 Camion PompierDocument2 pagesExo 6 Camion Pompierdamien de sousa50% (2)
- Le Tage 1886Document2 pagesLe Tage 1886Gergő RadócziPas encore d'évaluation
- Mise en Place Carrousel Ossature 2007 - v1.3 - FresDocument30 pagesMise en Place Carrousel Ossature 2007 - v1.3 - FresFelipe Camus100% (1)
- Définition Et Désignation Des CâblesDocument3 pagesDéfinition Et Désignation Des CâblesRomain CosentinoPas encore d'évaluation
- CHEM AppliRDM Thermique Corrigé WarrenDocument2 pagesCHEM AppliRDM Thermique Corrigé WarrenguessousPas encore d'évaluation
- Exam NatranPatran 2020Document1 pageExam NatranPatran 2020Hajar Ben GaraâPas encore d'évaluation
- Extrait Du LivreDocument10 pagesExtrait Du LivreMidouPas encore d'évaluation
- 1-1 - Tracer Le Développé D Un Piquage Gueule de Loup Tracer Le Développé D Un Piquage en V... 36Document10 pages1-1 - Tracer Le Développé D Un Piquage Gueule de Loup Tracer Le Développé D Un Piquage en V... 36Noureddine Ben SalemPas encore d'évaluation
- 06 Trancheur MecaDocument10 pages06 Trancheur MecaYahya AIDARAPas encore d'évaluation
- Calculer Les Longueurs Développées en Pliage - Rocd@cierDocument32 pagesCalculer Les Longueurs Développées en Pliage - Rocd@cierبلال بن عميرهPas encore d'évaluation
- Comment Calculer La Force de Flexion de Votre Presse Plieuse - HARSLE MACHINEDocument8 pagesComment Calculer La Force de Flexion de Votre Presse Plieuse - HARSLE MACHINEبلال بن عميرهPas encore d'évaluation
- 2138 Ni 99060035Document5 pages2138 Ni 99060035بلال بن عميرهPas encore d'évaluation
- PropulsionDocument21 pagesPropulsionبلال بن عميرهPas encore d'évaluation
- GCAlgerie.com(451)Document94 pagesGCAlgerie.com(451)بلال بن عميرهPas encore d'évaluation
- Tel Fritsch Analysette3Document6 pagesTel Fritsch Analysette3بلال بن عميرهPas encore d'évaluation
- 2010 BEPA E3 Agroéquip FR Réu AntDocument11 pages2010 BEPA E3 Agroéquip FR Réu Antبلال بن عميرهPas encore d'évaluation
- Chap6 - Coupe Et Optimisation PDFDocument55 pagesChap6 - Coupe Et Optimisation PDFبلال بن عميرهPas encore d'évaluation
- GARIN 2012 ArchivageDocument308 pagesGARIN 2012 Archivageبلال بن عميرهPas encore d'évaluation
- Ms GM Guenad PDFDocument80 pagesMs GM Guenad PDFAbd RazakPas encore d'évaluation
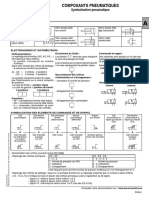
- Composants Pneumatiques: Symbolisation PneumatiqueDocument2 pagesComposants Pneumatiques: Symbolisation PneumatiqueZbreh SkeeperPas encore d'évaluation
- CHAPITRE II - COURS MOTEURS THERMIQUES 1 - de MR Adama - 2023-2024Document39 pagesCHAPITRE II - COURS MOTEURS THERMIQUES 1 - de MR Adama - 2023-2024assounaekrabenPas encore d'évaluation
- Data Panne Renault Clio 2 15cc DcidocDocument19 pagesData Panne Renault Clio 2 15cc DcidoctoufikPas encore d'évaluation
- Moteurs ThermiquesDocument16 pagesMoteurs ThermiquesMehdiaPas encore d'évaluation
- Turbine À GazDocument7 pagesTurbine À GazilyasPas encore d'évaluation
- Manitou MRT 3255 - MRT-X 3255 (FR)Document4 pagesManitou MRT 3255 - MRT-X 3255 (FR)ManitouPas encore d'évaluation
- CameDocument7 pagesCamemasteratsiiPas encore d'évaluation
- Mécanique AutomobileDocument2 pagesMécanique AutomobileRihabChommakhPas encore d'évaluation
- Cours Courroies Chaines eDocument2 pagesCours Courroies Chaines egeupierPas encore d'évaluation
- Lifton Neuson Wacker 2001 Dumper Parts BOOKDocument81 pagesLifton Neuson Wacker 2001 Dumper Parts BOOKMichael BochoridisPas encore d'évaluation
- Report CDL 07-08-2023 BOMAG BW 200 SeriesDocument23 pagesReport CDL 07-08-2023 BOMAG BW 200 SeriesAurélien JAMPIERREPas encore d'évaluation
- These Du ChaudDocument186 pagesThese Du ChaudhenriPas encore d'évaluation
- Boîte de Vitesses Mécanique C530.6: CaractéristiquesDocument5 pagesBoîte de Vitesses Mécanique C530.6: Caractéristiquestoni13021302Pas encore d'évaluation
- Exposée ArduinoDocument15 pagesExposée ArduinoIheb Hamed100% (1)
- Dev Synthèse n3 2022 K.HDocument6 pagesDev Synthèse n3 2022 K.Hacademy chahdPas encore d'évaluation
- Serp2737 23 01 AllDocument1 380 pagesSerp2737 23 01 AllDaniel Mendoza100% (2)
- 822D L822D 1.1FR 0418 Hi ResDocument6 pages822D L822D 1.1FR 0418 Hi Restystar_21Pas encore d'évaluation
- Descriptif Technique Pelle Hydraulique Pelle en Manutention Poids enDocument10 pagesDescriptif Technique Pelle Hydraulique Pelle en Manutention Poids enLiebherrPas encore d'évaluation
- RAPPORT D1ter NGARI NDJINDJILADocument2 pagesRAPPORT D1ter NGARI NDJINDJILAharriss ngariPas encore d'évaluation
- Liaison GlissiereDocument19 pagesLiaison GlissiereBilly BignakePas encore d'évaluation
- Yamaha 2014 Fz8-AbsDocument5 pagesYamaha 2014 Fz8-Absapi-240096302Pas encore d'évaluation
- 20150054-SC10-Schéma de Principe HVAC-EcoleDocument1 page20150054-SC10-Schéma de Principe HVAC-EcoleTroi LauraPas encore d'évaluation