Vous aimerez peut-être aussi
- Fascicule de Physique TS - 1Document233 pagesFascicule de Physique TS - 1It's Abbyy100% (3)
- GISEMENTDocument4 pagesGISEMENTTouré AbdoulPas encore d'évaluation
- Exercices Corrigés PC Tle DDocument140 pagesExercices Corrigés PC Tle DRaogo Laurent Ouedraogo83% (12)
- M. FAYE-TD Cinematique Du PointDocument3 pagesM. FAYE-TD Cinematique Du PointDabo100% (1)
- Geometrie Pour Dao2 PDFDocument161 pagesGeometrie Pour Dao2 PDFlekouf43100% (1)
- Série D'exercices N°5 - Physique - Mouvement Rectiligne Sinusoidal - 3ème Informatique (2017-2018) MR Hedfi KhemaisDocument2 pagesSérie D'exercices N°5 - Physique - Mouvement Rectiligne Sinusoidal - 3ème Informatique (2017-2018) MR Hedfi KhemaisMahmoud Essahbi Sahbi Daghsni92% (24)
- Didacticiel Papier - Sphinx Iq 2 PDFDocument442 pagesDidacticiel Papier - Sphinx Iq 2 PDFAthenaDona100% (1)
- TP Conduction CompletDocument10 pagesTP Conduction Complethamza layachi75% (4)
- Série D'exercices N°12 - Physique Mouvement Sinusoïdal - 3ème Toutes Sections (2012-2013) MR Ben Amor Jameleddine PDFDocument2 pagesSérie D'exercices N°12 - Physique Mouvement Sinusoïdal - 3ème Toutes Sections (2012-2013) MR Ben Amor Jameleddine PDFouzin2387% (23)
- Api RestDocument8 pagesApi RestfogoPas encore d'évaluation
- Chapitre 1 - Eléments de Physique NucléaireDocument69 pagesChapitre 1 - Eléments de Physique NucléaireMohamed El Hadi Redjaimia100% (1)
- TF06 P09 MedianDocument4 pagesTF06 P09 MedianAyt Moha BrahimPas encore d'évaluation
- Série D'exercices N°1 - Sciences Physiques Cinématique de Translation 1 - 3ème Sciences Exp (2010-2011) MR Boussada AtefDocument2 pagesSérie D'exercices N°1 - Sciences Physiques Cinématique de Translation 1 - 3ème Sciences Exp (2010-2011) MR Boussada Atefchahin0764% (11)
- Chapitre 2-2Document15 pagesChapitre 2-2Reda BachnouPas encore d'évaluation
- 612a0b6753b41sujet 2 Cinematique Physique Terminale CDocument2 pages612a0b6753b41sujet 2 Cinematique Physique Terminale CIbrahim BaziPas encore d'évaluation
- Série Cinématique 2023Document7 pagesSérie Cinématique 2023nourelhoudajemai961100% (1)
- Cinematique 1-FusionnéDocument17 pagesCinematique 1-Fusionnébechir sidialyPas encore d'évaluation
- Serie Cinematique Pages3a8Document6 pagesSerie Cinematique Pages3a8khermouslinda55Pas encore d'évaluation
- Serie 11 Cinématique - TranslationDocument4 pagesSerie 11 Cinématique - TranslationSamir LoqmanePas encore d'évaluation
- Serie Cinematique 23Document6 pagesSerie Cinematique 23yousra abdelbaki100% (1)
- Série D'exercices - Cinématique - Ts - SunudaaraDocument5 pagesSérie D'exercices - Cinématique - Ts - SunudaaraJule BaPas encore d'évaluation
- TS2 2023-2024 TD P1 CinématiqueDocument3 pagesTS2 2023-2024 TD P1 Cinématiquekkcbyk8mmgPas encore d'évaluation
- Cinématique: Exercice 1Document2 pagesCinématique: Exercice 1Maman SuperbePas encore d'évaluation
- Eric C10 2mouvement Objet Lancé VidéopointagetableurDocument3 pagesEric C10 2mouvement Objet Lancé Vidéopointagetableurbahijmalak4Pas encore d'évaluation
- Chapitre 12, Les Lois de Newton, Cours, Activités, Exercices D'application, 2BAC BIOF, PR JENKAL RACHIDDocument10 pagesChapitre 12, Les Lois de Newton, Cours, Activités, Exercices D'application, 2BAC BIOF, PR JENKAL RACHIDNour-DineAhrouyPas encore d'évaluation
- Sérice P1.2S.2024Document4 pagesSérice P1.2S.2024diopaminata48.alyPas encore d'évaluation
- Série Mouvement Rectiligne SinusoidalDocument2 pagesSérie Mouvement Rectiligne SinusoidalmanelbelhajlakdarPas encore d'évaluation
- Module 4Document54 pagesModule 4oclgi.oouPas encore d'évaluation
- TSP1SP2Ch6T5 TP12 Parabole PDFDocument3 pagesTSP1SP2Ch6T5 TP12 Parabole PDFUsiKuM2hdyPas encore d'évaluation
- MouvementDocument3 pagesMouvementben mamiaPas encore d'évaluation
- PhysI TD2Document1 pagePhysI TD2Onja Adriam Anheo LahatraPas encore d'évaluation
- Phys 1052 - Fil. Physique - Groupe 2Document54 pagesPhys 1052 - Fil. Physique - Groupe 2Juste Enkack100% (1)
- Série N°1 Cinématique de Translation 1 2010 2011 (Boussada Atef)Document2 pagesSérie N°1 Cinématique de Translation 1 2010 2011 (Boussada Atef)Malek Berrgueb100% (1)
- Exos Cinématique v2Document2 pagesExos Cinématique v2hafsa radouaniPas encore d'évaluation
- TD N°2 EnsDocument1 pageTD N°2 EnsFred AlexPas encore d'évaluation
- TP N°9: Etude Du Mouvement de Rotation D'Un Solide Autour D'Un Axe FixeDocument3 pagesTP N°9: Etude Du Mouvement de Rotation D'Un Solide Autour D'Un Axe FixeOUSSAMA BOUTRIAPas encore d'évaluation
- TD1 Serie 1 Cinematique Du PointDocument2 pagesTD1 Serie 1 Cinematique Du Pointsambe.elPas encore d'évaluation
- 2024KE Physique Chimie TD 2021-2024Document17 pages2024KE Physique Chimie TD 2021-2024Elie KapouPas encore d'évaluation
- Orga KE Physique Chimie TD 2021-2023Document14 pagesOrga KE Physique Chimie TD 2021-2023Elie KapouPas encore d'évaluation
- TD N°1 EnsDocument2 pagesTD N°1 EnsFred AlexPas encore d'évaluation
- Serie 1 Cinematique TS1 2017 - 2018Document4 pagesSerie 1 Cinematique TS1 2017 - 2018PFE83% (6)
- Serie 2 CinematiqueDocument4 pagesSerie 2 CinematiqueWiem Menaa100% (3)
- Travaux Diriges de Mecanique - Medecine - PharmacieDocument8 pagesTravaux Diriges de Mecanique - Medecine - Pharmacieadjidavibruno7Pas encore d'évaluation
- 1597@0@11409 3xrGppJKamA Chapitre 10 - Cinématique Du PointDocument43 pages1597@0@11409 3xrGppJKamA Chapitre 10 - Cinématique Du PointanarelkhouryPas encore d'évaluation
- DTL1 05 - 06Document2 pagesDTL1 05 - 06Sellé GueyePas encore d'évaluation
- PH TP12a Oscill Horizontal CorrectDocument4 pagesPH TP12a Oscill Horizontal CorrectfatihamPas encore d'évaluation
- TD Physique Serie n2Document5 pagesTD Physique Serie n2Speed Speed100% (1)
- PC 2nd C - P1 Le MouvementDocument13 pagesPC 2nd C - P1 Le MouvementPina Spk100% (1)
- Cours Cinématique WebDocument4 pagesCours Cinématique WebSoufiane Chebbi ChebbiPas encore d'évaluation
- TD 02 Meca Point ING ST JeanDocument7 pagesTD 02 Meca Point ING ST JeanMiguel AngePas encore d'évaluation
- NYA - XXI - Chap 1.3Document8 pagesNYA - XXI - Chap 1.3Mitch TobinPas encore d'évaluation
- TD Cinématique - 2023-2024 - V1Document6 pagesTD Cinématique - 2023-2024 - V1kiko016livePas encore d'évaluation
- 211266416série N7Document2 pages211266416série N7Мохамед Ель ФахімPas encore d'évaluation
- Devoir de Mecanique Du Point Parcours Srit 14-15Document6 pagesDevoir de Mecanique Du Point Parcours Srit 14-15PLK 225Pas encore d'évaluation
- Cinematique Du PointDocument7 pagesCinematique Du PointKangah Louis KouassiPas encore d'évaluation
- Physique - 3° TH SC M - MVT Rectiligne - Serie D'exercicesDocument3 pagesPhysique - 3° TH SC M - MVT Rectiligne - Serie D'exercicesMohamed100% (1)
- TP N°1 - Vitesse Et AccélérationDocument6 pagesTP N°1 - Vitesse Et AccélérationNou-thy SiongPas encore d'évaluation
- 1 Gene Et GR CinematiquesDocument3 pages1 Gene Et GR CinematiquesHama DonPas encore d'évaluation
- 1 - Chapitre Nâ°5 - Mouvements - Version 2023Document5 pages1 - Chapitre Nâ°5 - Mouvements - Version 2023Bae GRANDERPas encore d'évaluation
- SinusoidalDocument2 pagesSinusoidalHiba Ep Ezou50% (2)
- Série MR SINU WEBDocument2 pagesSérie MR SINU WEBDaboPas encore d'évaluation
- Chap IDocument17 pagesChap IJames Clerk MaxwellPas encore d'évaluation
- Activités Unité1 Phy 1bac SM ET PCDocument4 pagesActivités Unité1 Phy 1bac SM ET PCOthmane Raiss100% (1)
- Mecanique Terminale-1Document33 pagesMecanique Terminale-1bangouraaboubacar004Pas encore d'évaluation
- Chap 1 Cours Les Nombres ReelsDocument10 pagesChap 1 Cours Les Nombres ReelsSaïd AliPas encore d'évaluation
- Henri Fayol Cours 4Document18 pagesHenri Fayol Cours 4Saïd AliPas encore d'évaluation
- Cours Ensembles ENSTPDocument7 pagesCours Ensembles ENSTPSaïd AliPas encore d'évaluation
- Cours LogiqueDocument6 pagesCours LogiqueSBA Nabil ZakariaPas encore d'évaluation
- TP 2 Physique SaidDocument8 pagesTP 2 Physique SaidSaïd AliPas encore d'évaluation
- TP 3 PhysiqueDocument1 pageTP 3 PhysiqueSaïd AliPas encore d'évaluation
- Projet de Recherche D'Ingénieurie HumaineDocument4 pagesProjet de Recherche D'Ingénieurie HumaineSaïd AliPas encore d'évaluation
- UE Cybersécurité-Initiation Metasploit v0.3Document17 pagesUE Cybersécurité-Initiation Metasploit v0.3didierPas encore d'évaluation
- PdM3 Guide Corrige Vrac Repros C4Document2 pagesPdM3 Guide Corrige Vrac Repros C4Eva BteichPas encore d'évaluation
- ChapitreDocument8 pagesChapitreAchour IfrekPas encore d'évaluation
- Howto L3 IntervlanroutingDocument7 pagesHowto L3 IntervlanroutingWilford ToussaintPas encore d'évaluation
- Mémoire de Master-YF-Post Soutenance-20200610Document70 pagesMémoire de Master-YF-Post Soutenance-20200610Yacinthe FAYE100% (1)
- 3 - Modeles de Markov CachesDocument34 pages3 - Modeles de Markov CachesWISSALPas encore d'évaluation
- Corrige TD 8 1920 2Document5 pagesCorrige TD 8 1920 2friends diaryPas encore d'évaluation
- DJE4394Document119 pagesDJE4394danPas encore d'évaluation
- Algèbre 1 V. Def 2017-2018Document141 pagesAlgèbre 1 V. Def 2017-2018Alexis Rosuel100% (1)
- FeuilletageDocument25 pagesFeuilletageLē JøkērPas encore d'évaluation
- DS SDM S1 2015 CorrectionDocument2 pagesDS SDM S1 2015 CorrectiondsiscnPas encore d'évaluation
- Maths X PSI 1998 (Enoncé)Document7 pagesMaths X PSI 1998 (Enoncé)LM --Pas encore d'évaluation
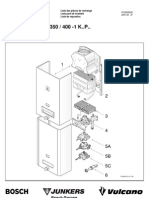
- W - 250 - 275 - 325 - 350 - 400 - 1 K..p..Document28 pagesW - 250 - 275 - 325 - 350 - 400 - 1 K..p..joviadoPas encore d'évaluation
- Cahier de Charge Du ProjetDocument4 pagesCahier de Charge Du ProjetMehdi KhaledPas encore d'évaluation
- 04 JSFT-echangeur-2012 GRESPI Fohanno PDFDocument21 pages04 JSFT-echangeur-2012 GRESPI Fohanno PDFzermiPas encore d'évaluation
- CC 1 Analyse Natalia Borbón TorresDocument3 pagesCC 1 Analyse Natalia Borbón TorresNatalia Borbon TorresPas encore d'évaluation
- Unite 71 Manuel OpératoireDocument110 pagesUnite 71 Manuel OpératoireAbdessalem Bougoffa50% (2)
- Examen de Fin de Formation 2008 Tsri Pratique Variante 9Document5 pagesExamen de Fin de Formation 2008 Tsri Pratique Variante 9FatimaLEPas encore d'évaluation
- Incendie: I-Prévention Et ProtectionDocument4 pagesIncendie: I-Prévention Et Protectionraid bazizPas encore d'évaluation
- Exercices Chapitre 3 FractionsDocument3 pagesExercices Chapitre 3 FractionsTony GRACAPas encore d'évaluation
- NF EN 1431 (Mai 2009)Document19 pagesNF EN 1431 (Mai 2009)Fatima BouhajaPas encore d'évaluation
- ANNONCES ASSISTANTS MATERNELS-Disponibilités Secteur Lyautey Du 12 Juin 2020Document3 pagesANNONCES ASSISTANTS MATERNELS-Disponibilités Secteur Lyautey Du 12 Juin 2020younes amaraPas encore d'évaluation
- Année Prépa Electricité, Deuxième PartieDocument221 pagesAnnée Prépa Electricité, Deuxième PartieAbdelkader Faklani DouPas encore d'évaluation