Vous aimerez peut-être aussi
- TD Api05022019Document10 pagesTD Api05022019Mohamed FathallahPas encore d'évaluation
- TD Supervision CorrigéDocument10 pagesTD Supervision CorrigéSana GassémPas encore d'évaluation
- TD N2 LadderDocument3 pagesTD N2 Ladderghassen Ben hlima100% (1)
- Travaux PratiquesDocument2 pagesTravaux PratiquesFatima Zahra AmalouPas encore d'évaluation
- TP1 Commande Semi Automatique Chariot PDFDocument4 pagesTP1 Commande Semi Automatique Chariot PDFskoooza100% (2)
- TD 2Document1 pageTD 2Ghlissi Nejib0% (1)
- Révision Examen FinalDocument7 pagesRévision Examen Finalasmaahmedhassan12Pas encore d'évaluation
- Christus Vincit Kunc ChoeurDocument1 pageChristus Vincit Kunc ChoeurKrisostomus Nova RahmantoPas encore d'évaluation
- Examen IE5 Janvier 2020 FinalDocument14 pagesExamen IE5 Janvier 2020 FinalDhafer MezghaniPas encore d'évaluation
- Poly TD SAPDocument18 pagesPoly TD SAPOussama BeddaPas encore d'évaluation
- ANALYSE DESCENDANT (Ex)Document4 pagesANALYSE DESCENDANT (Ex)Med FilaliPas encore d'évaluation
- Contrôle #1 Automates Programmables Industriels: Exercice 1Document2 pagesContrôle #1 Automates Programmables Industriels: Exercice 1Mimo Moo100% (1)
- Graf Cet Exercice SDocument15 pagesGraf Cet Exercice SHichem Hamdi50% (2)
- Poly TD API PDFDocument10 pagesPoly TD API PDFKhadija HajadePas encore d'évaluation
- Automatisme - L3-Eai-Elm - Exercices D'introduction Au GrafcetDocument4 pagesAutomatisme - L3-Eai-Elm - Exercices D'introduction Au GrafcetKing CyrusPas encore d'évaluation
- TD3processus Industriel MoodleDocument5 pagesTD3processus Industriel Moodlelamis rezkiPas encore d'évaluation
- TD1 Automatisme - GRAFCETDocument11 pagesTD1 Automatisme - GRAFCETFadila FE100% (2)
- Exercice de Sti Automatisme Bac BlancDocument5 pagesExercice de Sti Automatisme Bac BlancElmokh Lassaad0% (1)
- TD2 Sur Chapitre 2. Le GrafcetDocument7 pagesTD2 Sur Chapitre 2. Le GrafcetMa Jhoul0% (1)
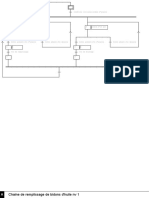
- EX 3 - Chaine de Remplissage de Bidons D'huile NV 1 & NV 2 - FusionnéDocument3 pagesEX 3 - Chaine de Remplissage de Bidons D'huile NV 1 & NV 2 - FusionnéMounaim Matini100% (1)
- TD3 - Automatisme IndustrielDocument7 pagesTD3 - Automatisme IndustrielFifi La MarionnettePas encore d'évaluation
- TP 1Document4 pagesTP 1Houda BourimechPas encore d'évaluation
- Devoir AutomatismeDocument2 pagesDevoir AutomatismekonanPas encore d'évaluation
- TD GRAFCET 3ème ST 2010Document4 pagesTD GRAFCET 3ème ST 2010Charaf LeoPas encore d'évaluation
- Exercice Chariots PDFDocument2 pagesExercice Chariots PDFAhmed Bnzi100% (1)
- td3 APIDocument2 pagestd3 APIعثمان عثمانPas encore d'évaluation
- TD 2 Automates Programmables Industriels 2020 - 2021Document2 pagesTD 2 Automates Programmables Industriels 2020 - 2021adamPas encore d'évaluation
- Exercice 1: Déplacement D'un Wagonnet: Savoir M303 Commande Des Machines Par API Activité: TD TD: GrafcetDocument4 pagesExercice 1: Déplacement D'un Wagonnet: Savoir M303 Commande Des Machines Par API Activité: TD TD: GrafcetAbdelhadi AZPas encore d'évaluation
- GE-T.LANTRI-Automates Programmables Industriels (API) - TP5 - API - L3 - AUTO-L3-S6Document2 pagesGE-T.LANTRI-Automates Programmables Industriels (API) - TP5 - API - L3 - AUTO-L3-S6Rabah Amidi100% (1)
- Exam API Seer-Gecsi 2020-2021Document4 pagesExam API Seer-Gecsi 2020-2021Safae AbdelmounimPas encore d'évaluation
- LadderDocument1 pageLadderMounir Hadrich0% (1)
- Correction Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021Document5 pagesCorrection Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021aliPas encore d'évaluation
- td4 Sur Chapitre 2. Le GrafcetDocument27 pagestd4 Sur Chapitre 2. Le Grafcetعبد الكريم ملوحPas encore d'évaluation
- Grafcet Et Point de VueDocument4 pagesGrafcet Et Point de VueLTIMK100% (1)
- EXAMENAutomatismeDocument1 pageEXAMENAutomatismegringo yeso100% (1)
- TD Grafcet Série3 PDFDocument15 pagesTD Grafcet Série3 PDFSeekn DstroyPas encore d'évaluation
- Cours Grafcet Ts1cira PDFDocument30 pagesCours Grafcet Ts1cira PDFOmar ArfaouiPas encore d'évaluation
- Perc AutoDocument4 pagesPerc Autoyaccine100% (1)
- td4 Grafcet Avec SolutionDocument8 pagestd4 Grafcet Avec SolutionAmina Lazreg100% (1)
- TD1 Grafcet 2023 2024Document12 pagesTD1 Grafcet 2023 2024naimibtissam01Pas encore d'évaluation
- Zelio Sur Douille 35 104Document70 pagesZelio Sur Douille 35 104moplkiPas encore d'évaluation
- Travaux Dirigés D'automates Programmables Industrels LPU GEII 2021-2022Document9 pagesTravaux Dirigés D'automates Programmables Industrels LPU GEII 2021-2022mohamedPas encore d'évaluation
- TD Grafcet Série2Document3 pagesTD Grafcet Série2Wiam MahboubPas encore d'évaluation
- 05exercices GrafcetDocument4 pages05exercices Grafcetnajlae alfathiPas encore d'évaluation
- TD 1 LadderDocument17 pagesTD 1 LadderImad ImadPas encore d'évaluation
- Exercice GRAFCET DUT 2019 Serie 1 PDFDocument4 pagesExercice GRAFCET DUT 2019 Serie 1 PDFAstou FallPas encore d'évaluation
- DT - Système de Production Des Godets de YaourtDocument6 pagesDT - Système de Production Des Godets de YaourtIsmail Ezzine100% (1)
- DC Automatisme 2020 Et CorrigéDocument5 pagesDC Automatisme 2020 Et CorrigéIslemePas encore d'évaluation
- Exo G7Document1 pageExo G7Elmokh LassaadPas encore d'évaluation
- Automatismes Industriels CC 2015 2016Document5 pagesAutomatismes Industriels CC 2015 2016Youssef RagraguiPas encore d'évaluation
- Les Systèmes AutomatisésDocument70 pagesLes Systèmes Automatisésl mPas encore d'évaluation
- TD Trie de Caisses ElevDocument2 pagesTD Trie de Caisses ElevNabilPas encore d'évaluation
- TD 2 Automates Programmables Industriels 2020 - 2021Document2 pagesTD 2 Automates Programmables Industriels 2020 - 2021adamPas encore d'évaluation
- Travaux Dirigés: Systèmes AutomatisésDocument7 pagesTravaux Dirigés: Systèmes AutomatisésAnas YassinePas encore d'évaluation
- Devoir de Contrôle N°1 - Technologie Poste Automatique de Pliage Et de Découpage - 2ème Sciences (2012-2013) MR BAAZAOUI RaoufDocument4 pagesDevoir de Contrôle N°1 - Technologie Poste Automatique de Pliage Et de Découpage - 2ème Sciences (2012-2013) MR BAAZAOUI Raoufchaouachi alarbiPas encore d'évaluation
- CD Goulotte Chateau ChariotDocument6 pagesCD Goulotte Chateau ChariotMaha HaririPas encore d'évaluation
- Pliage Grafcet+LadderDocument7 pagesPliage Grafcet+LadderIlias EmsaPas encore d'évaluation
- Exos GrafcetDocument26 pagesExos GrafcetRuben Yav100% (2)
- Schéma AutoDocument10 pagesSchéma AutoKaneki KenPas encore d'évaluation
- Auto - 1 - 2023 OkDocument8 pagesAuto - 1 - 2023 OkfjosephfabricePas encore d'évaluation
- TD CpiDocument6 pagesTD CpiPatrick Juvet Gnetchejo100% (1)
- Commande de MachinesDocument3 pagesCommande de MachinesJean Claude Agnomo100% (2)
- IntroductionDocument12 pagesIntroductionZak AriaPas encore d'évaluation
- TD2-ANALYSE DES SYSTEMES-Carton ondulé-MK3-IIA3Document14 pagesTD2-ANALYSE DES SYSTEMES-Carton ondulé-MK3-IIA3Albertø Là VïtëssëPas encore d'évaluation
- TD1-Dispositif de SerrageDocument6 pagesTD1-Dispositif de SerrageAlbertø Là VïtëssëPas encore d'évaluation
- 5c88b4bab1b76 - Si Le Grain de BleDocument2 pages5c88b4bab1b76 - Si Le Grain de BleAlbertø Là VïtëssëPas encore d'évaluation
- 11.molecule Adn NEWDocument5 pages11.molecule Adn NEWAlbertø Là VïtëssëPas encore d'évaluation
- CredoDocument3 pagesCredoAlbertø Là VïtëssëPas encore d'évaluation
- Psaume 145 Aelf2015 Chante o Mon Ame FonsalasDocument1 pagePsaume 145 Aelf2015 Chante o Mon Ame FonsalasAlbertø Là VïtëssëPas encore d'évaluation
- CV 167-C Est Mon Joyeux Service A4Document1 pageCV 167-C Est Mon Joyeux Service A4Albertø Là VïtëssëPas encore d'évaluation
- Père Je Te Bénis. ParolesDocument1 pagePère Je Te Bénis. ParolesAlbertø Là VïtëssëPas encore d'évaluation
- Je ChercheDocument1 pageJe ChercheAlbertø Là VïtëssëPas encore d'évaluation
- CV 006-A Dieu Soit La Gloire A4Document2 pagesCV 006-A Dieu Soit La Gloire A4MngPas encore d'évaluation
- CV 166-Qu Il Fait Bon A Ton Service A4Document1 pageCV 166-Qu Il Fait Bon A Ton Service A4Albertø Là VïtëssëPas encore d'évaluation
- Annee C Temps Du Careme 2e Dimanche Psaume 26Document1 pageAnnee C Temps Du Careme 2e Dimanche Psaume 26Albertø Là VïtëssëPas encore d'évaluation
- Formation HaasDocument542 pagesFormation HaasMohamed AmeurPas encore d'évaluation
- Apl ApDocument195 pagesApl ApAristide SetondjiPas encore d'évaluation
- Chapitre III Interruptions 4x1Document11 pagesChapitre III Interruptions 4x1사라SaraPas encore d'évaluation
- Ab 000Document75 pagesAb 000bejaouiPas encore d'évaluation
- 3LMD - Chap1 Introduction Systèmes D'exploitation Des OrdinateursDocument4 pages3LMD - Chap1 Introduction Systèmes D'exploitation Des OrdinateursChu BatnaPas encore d'évaluation
- 4 Micro ProcesseurDocument39 pages4 Micro ProcesseurCharafeddine ELBAHJAPas encore d'évaluation
- Réalisé Par Daouda KitalDocument7 pagesRéalisé Par Daouda KitalDaouda KitalPas encore d'évaluation
- Cours SasDocument105 pagesCours SasMariemPas encore d'évaluation
- Les Systèmes EmbarquésDocument17 pagesLes Systèmes EmbarquésWalid AmriPas encore d'évaluation
- Série 3si ItérativeDocument8 pagesSérie 3si ItérativeMohamed Ali RabahPas encore d'évaluation
- Polycopié Systèmes D'exploitation 1 Partie 1 (Cours) : April 2019Document53 pagesPolycopié Systèmes D'exploitation 1 Partie 1 (Cours) : April 2019Fatima LaichePas encore d'évaluation
- Coursinformatique Id3356Document15 pagesCoursinformatique Id3356Braiek FaresPas encore d'évaluation
- Programmation Assembleur 2019 DR Didier BASSOLEDocument99 pagesProgrammation Assembleur 2019 DR Didier BASSOLEFernand OuedraogoPas encore d'évaluation
- Cours Algorithme Partie1Document43 pagesCours Algorithme Partie1Assidé Christian Djedouboum100% (1)
- Codage Farmer PLC Pour Les Instructions de Réglage F4Document17 pagesCodage Farmer PLC Pour Les Instructions de Réglage F4Samir SamsamPas encore d'évaluation
- Synthese Seq23Document2 pagesSynthese Seq23JardPas encore d'évaluation
- Architecture de L'ordinateur CoursDocument52 pagesArchitecture de L'ordinateur CoursImane lachgarPas encore d'évaluation
- Chapitre 3 AODocument37 pagesChapitre 3 AOÑį HăđPas encore d'évaluation
- LP 1Document37 pagesLP 1Wenday PadéPas encore d'évaluation
- 1 - Introduction À L'informatiqueDocument19 pages1 - Introduction À L'informatiqueOthman ShonePas encore d'évaluation
- Exam 2017Document2 pagesExam 2017Mohamed Hmamouch100% (2)
- CourseDocument119 pagesCourseEmnaa HasnewiPas encore d'évaluation
- Wa0006.Document125 pagesWa0006.hajarsaoudislPas encore d'évaluation
- F006086 PDFDocument435 pagesF006086 PDFgaetantaffo100% (2)
- Architecture Des Ordinateurs PDFDocument73 pagesArchitecture Des Ordinateurs PDFYaya FallPas encore d'évaluation
- Série D'exercicesDocument4 pagesSérie D'exercicesnesrine nina100% (1)
- Tout en UN Des Questions d'ASSEMBLEURDocument10 pagesTout en UN Des Questions d'ASSEMBLEURBahae SlimPas encore d'évaluation
- Manuel de TP Pascal 1er LMD ST ROUBADocument77 pagesManuel de TP Pascal 1er LMD ST ROUBAallabinsfpPas encore d'évaluation
- TD Mips 2020-2021Document5 pagesTD Mips 2020-2021Nadim HafsiPas encore d'évaluation