Vous aimerez peut-être aussi
- Sap 8 19 20Document44 pagesSap 8 19 20zineb bouderhemPas encore d'évaluation
- Chap4 SaeDocument18 pagesChap4 Saesami BoumendjelPas encore d'évaluation
- Chapitre 2 SEDocument9 pagesChapitre 2 SEBadr HamedPas encore d'évaluation
- Chapitre IV-Stabilité Et Précision Des Systèmes Linéaires Asservis Critère de Routh PDFDocument5 pagesChapitre IV-Stabilité Et Précision Des Systèmes Linéaires Asservis Critère de Routh PDFHouimli AbdlazizPas encore d'évaluation
- Chapitre 06Document14 pagesChapitre 06El faalah MedaymanPas encore d'évaluation
- Comnum 6 TXT PDFDocument15 pagesComnum 6 TXT PDFKhaled OuniPas encore d'évaluation
- Analyse de La Stabilitã Prãcision Des Systãmes ÃchantillonnÃs - 2022Document14 pagesAnalyse de La Stabilitã Prãcision Des Systãmes ÃchantillonnÃs - 2022Nadia AttabPas encore d'évaluation
- Automatique, Informatique Et Informatique Industielle0001Document16 pagesAutomatique, Informatique Et Informatique Industielle0001Ilyass Hani100% (1)
- TD Régulation EMSI Série 2Document5 pagesTD Régulation EMSI Série 2SalabPas encore d'évaluation
- Asservissement Cours StabilitéDocument8 pagesAsservissement Cours StabilitéMelissaPas encore d'évaluation
- Chapitre 2Document16 pagesChapitre 2Timble GrandenPas encore d'évaluation
- LAT61 - Systemes Asservis Echantillonnes - Chapitre 4 Et TD3Document19 pagesLAT61 - Systemes Asservis Echantillonnes - Chapitre 4 Et TD3Adem TayebPas encore d'évaluation
- 1 - TD13 Cinématique Schémas CinématiquesDocument6 pages1 - TD13 Cinématique Schémas CinématiquesCorentin ProdPas encore d'évaluation
- Chapitre 3Document12 pagesChapitre 3yasmine hmn0% (1)
- Automatique Chap 2 Transformé en ZDocument18 pagesAutomatique Chap 2 Transformé en ZbadrPas encore d'évaluation
- Chapitre 5 - La Vision 3DDocument21 pagesChapitre 5 - La Vision 3DNasreddinePas encore d'évaluation
- Meilleurs CoursExercices - Com td3 435Document2 pagesMeilleurs CoursExercices - Com td3 435Algerian Aissaoui100% (1)
- Chapitre2 Intégration - ComplexeDocument11 pagesChapitre2 Intégration - ComplexeSilner DzPas encore d'évaluation
- Asservissement Numérique: Réponse Des Systèmes À Temps Discret Systeme D'ordre 1 Chapitre 3Document20 pagesAsservissement Numérique: Réponse Des Systèmes À Temps Discret Systeme D'ordre 1 Chapitre 3Radouan RadwanPas encore d'évaluation
- Interro TRM M1 6 Décembre2015Document4 pagesInterro TRM M1 6 Décembre2015Chakib ChPas encore d'évaluation
- Oscillateurs Chap 3Document38 pagesOscillateurs Chap 3Hafsa HakimPas encore d'évaluation
- Chapitre 1 Performances Des Systemes Asservis LineaireDocument10 pagesChapitre 1 Performances Des Systemes Asservis LineaireMed Raslene AlouiPas encore d'évaluation
- Systemes Echantillonnés D'ordre 2Document2 pagesSystemes Echantillonnés D'ordre 2khayyamPas encore d'évaluation
- Repr Esentation Et Analyse Des Syst' Emes Lin Eaires Cours 3 Stabilit e Des Syst' Emes DynamiquesDocument21 pagesRepr Esentation Et Analyse Des Syst' Emes Lin Eaires Cours 3 Stabilit e Des Syst' Emes Dynamiquesbelaliakarim82Pas encore d'évaluation
- TP4 Système Asservis OctaveDocument4 pagesTP4 Système Asservis Octavebenaissa maherPas encore d'évaluation
- Chapitre 2Document8 pagesChapitre 2An IsPas encore d'évaluation
- TP Dut-Etk2 2016Document6 pagesTP Dut-Etk2 2016ibrazizi2000Pas encore d'évaluation
- Chapitre - 4. Stabililit dyanmyque-REDocument10 pagesChapitre - 4. Stabililit dyanmyque-REBationo Antoine De padouePas encore d'évaluation
- Analyse Des PerfomarmancesDocument6 pagesAnalyse Des PerfomarmancesFiras AguirPas encore d'évaluation
- TP 2 GMDVDocument6 pagesTP 2 GMDVmewguv Ahmed salekPas encore d'évaluation
- TD Auto Asservissement Echantillonne L3EMDocument3 pagesTD Auto Asservissement Echantillonne L3EMSanhouidi StephanePas encore d'évaluation
- Devoir Auto2 19-20Document5 pagesDevoir Auto2 19-20Houda BourimechPas encore d'évaluation
- Chapitre III - Automatique DiscrèteDocument14 pagesChapitre III - Automatique DiscrèteDouaa GhazouaniPas encore d'évaluation
- Chap2 ESE04 2021Document9 pagesChap2 ESE04 2021Hemza SellamnaPas encore d'évaluation
- 3-Performances Des Systèmes Linéaires ÉchantillonnésDocument4 pages3-Performances Des Systèmes Linéaires ÉchantillonnésLahdheri ChadiPas encore d'évaluation
- Bac D2019 SNDocument2 pagesBac D2019 SNHassen JinyorPas encore d'évaluation
- TP4 RLCDocument3 pagesTP4 RLCCircuit couple0% (1)
- MCD RobotSpheriqueDocument3 pagesMCD RobotSpheriquePhantom TontonPas encore d'évaluation
- TD 1 MA 2020 VFaDocument8 pagesTD 1 MA 2020 VFaMohamed FoudalPas encore d'évaluation
- Corrigé Partie C TD4Document10 pagesCorrigé Partie C TD4Aziz Ben AbedlwahedPas encore d'évaluation
- Mon Cours Étudiant A&r - Commande NumériqueDocument50 pagesMon Cours Étudiant A&r - Commande NumériqueMouhamed DioufPas encore d'évaluation
- Chapitre 5 - Synthèse Des Filtre RIIDocument18 pagesChapitre 5 - Synthèse Des Filtre RIIimane takhiPas encore d'évaluation
- (E) DiscretisationDocument8 pages(E) Discretisationyassine78Pas encore d'évaluation
- Helicoptere 3Document1 pageHelicoptere 3أبو كعب علاء الدينPas encore d'évaluation
- Slides RSTv2Document52 pagesSlides RSTv2Norian GuerninePas encore d'évaluation
- Stabilité D'un Systéme AsservisDocument7 pagesStabilité D'un Systéme AsservisAser DaoPas encore d'évaluation
- ExoDocument29 pagesExoMahj AyouPas encore d'évaluation
- Chapitre Viii. Presentation de Quelques Correcteurs StandardDocument14 pagesChapitre Viii. Presentation de Quelques Correcteurs StandardAli BelabedPas encore d'évaluation
- Chapitre II - Transformée en ZDocument18 pagesChapitre II - Transformée en ZAli BelabedPas encore d'évaluation
- S10 RSFDocument9 pagesS10 RSFVictor B.Pas encore d'évaluation
- Chapitre II Math4Document9 pagesChapitre II Math4Abdelatif KarbiPas encore d'évaluation
- Chapitre 1 AutoDocument8 pagesChapitre 1 AutoMn IslemPas encore d'évaluation
- TP-02-Syst-Lin-ass S4 Auto.Document4 pagesTP-02-Syst-Lin-ass S4 Auto.Djameleddine BougrinePas encore d'évaluation
- Partiel Asservissement-2019Document2 pagesPartiel Asservissement-2019MelissaPas encore d'évaluation
- Chapitre 4 Analyse Synthese Systemes Asservis Lineaires Methode Lieu de PolesDocument14 pagesChapitre 4 Analyse Synthese Systemes Asservis Lineaires Methode Lieu de PolesMed Raslene AlouiPas encore d'évaluation
- Compatibilité ElectromagnétiqueDocument5 pagesCompatibilité ElectromagnétiqueSawat SiwarPas encore d'évaluation
- DS 19-20 1ing Ge-ArcDocument2 pagesDS 19-20 1ing Ge-Arcfakhri menjliPas encore d'évaluation
- TP N°3Document7 pagesTP N°3ddPas encore d'évaluation
- Cours 07Document8 pagesCours 07BalalaŇaŖîfPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Chap3f TPDocument10 pagesChap3f TPChris ShulzPas encore d'évaluation
- Chap4f CESPDocument7 pagesChap4f CESPChris ShulzPas encore d'évaluation
- ChapFinal AsservissmentDocument9 pagesChapFinal AsservissmentChris ShulzPas encore d'évaluation
- Solution TDDocument4 pagesSolution TDChris ShulzPas encore d'évaluation
- Td4 - Précision - 2022Document2 pagesTd4 - Précision - 2022Chris ShulzPas encore d'évaluation
- Chap4 PrécisionDocument3 pagesChap4 PrécisionChris ShulzPas encore d'évaluation
- Chap1 - Introduction SANDocument8 pagesChap1 - Introduction SANChris ShulzPas encore d'évaluation
- Transformée de ZDocument20 pagesTransformée de ZChris ShulzPas encore d'évaluation
- La Transformée de Z - TZDocument26 pagesLa Transformée de Z - TZChris ShulzPas encore d'évaluation
- TD3 Asservissment StabilitéDocument2 pagesTD3 Asservissment StabilitéChris ShulzPas encore d'évaluation
- Chapitre 4 Cour C++Document28 pagesChapitre 4 Cour C++Chris ShulzPas encore d'évaluation
- Chapitre 3 Cour C++Document38 pagesChapitre 3 Cour C++Chris ShulzPas encore d'évaluation
- Chapitre 2 Cour C+++Document53 pagesChapitre 2 Cour C+++Chris ShulzPas encore d'évaluation
- Chapitre 1 C++Document20 pagesChapitre 1 C++Chris Shulz0% (1)
- Défis Et Sortilèges 1-Caïthness 'ÉlémentalisteDocument269 pagesDéfis Et Sortilèges 1-Caïthness 'ÉlémentalisteWolfen Dugondor100% (1)
- Lectropol5 Unite de ControleDocument80 pagesLectropol5 Unite de ControleFabien CazesPas encore d'évaluation
- La Communication Non-Violente (Nathalie Achard (Achard, Nathalie) )Document174 pagesLa Communication Non-Violente (Nathalie Achard (Achard, Nathalie) )Yuri AbittanPas encore d'évaluation
- Cours de Route 1 Et 2Document126 pagesCours de Route 1 Et 2Charles N'DAPas encore d'évaluation
- Poste HT MTDocument51 pagesPoste HT MTSoufian Jaafar80% (5)
- Roches MétamorphiquesDocument17 pagesRoches MétamorphiquesZed David NseyePas encore d'évaluation
- Cejm RevisionDocument3 pagesCejm Revisionmélinda girayPas encore d'évaluation
- TD L1 Analyse1A 22-23 Ok-1Document3 pagesTD L1 Analyse1A 22-23 Ok-1Messi TourePas encore d'évaluation
- CH 09 PonceauxDocument36 pagesCH 09 PonceauxMa7bes100% (2)
- Transformateur HTBDocument2 pagesTransformateur HTBsoualmia Med El AminePas encore d'évaluation
- Rapport BrundtlandDocument4 pagesRapport BrundtlandMoez0% (1)
- Chap 4 Modelisation Des Actions MecaniquesDocument8 pagesChap 4 Modelisation Des Actions MecaniquesMohamed NdiayePas encore d'évaluation
- 2002LIMO0026Document175 pages2002LIMO0026Ayoub LaouinatePas encore d'évaluation
- Bon de Commande JFDocument1 pageBon de Commande JFassoamfyPas encore d'évaluation
- Totso ReneDocument6 pagesTotso ReneMejri Mouhamed AliPas encore d'évaluation
- Carte de Simulation D'eprom 2764, 27128 Et 27256Document7 pagesCarte de Simulation D'eprom 2764, 27128 Et 27256MedPas encore d'évaluation
- Economie Denergie Dans Leclairage PublicDocument84 pagesEconomie Denergie Dans Leclairage PublicmariaPas encore d'évaluation
- Fiche N°5 AGREGATS ET RATIOSDocument3 pagesFiche N°5 AGREGATS ET RATIOSOusmane MaigaPas encore d'évaluation
- CHEC Pres Mixte 11 2pagesDocument55 pagesCHEC Pres Mixte 11 2pagesnvmhumgPas encore d'évaluation
- Cours Marketing2Document119 pagesCours Marketing2samisimoPas encore d'évaluation
- Qu'est-Ce Qu'une Initiation ÉnergétiqueDocument1 pageQu'est-Ce Qu'une Initiation Énergétiquencriqui100% (1)
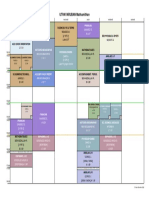
- Emploi Du Temps Annuel de UTHAYARUBAN Mathumithan - 2022-2023Document1 pageEmploi Du Temps Annuel de UTHAYARUBAN Mathumithan - 2022-2023SnaboPas encore d'évaluation
- Ethique de SpinozaDocument327 pagesEthique de Spinozagarcia100% (1)
- Catalogo Postes PDFDocument120 pagesCatalogo Postes PDFkloic1980Pas encore d'évaluation
- Gestion - Paie-Aspnet-CsharpDocument122 pagesGestion - Paie-Aspnet-CsharpAbdo Taoufik0% (1)
- Corrigé Page 19Document7 pagesCorrigé Page 19nesli hanePas encore d'évaluation
- Theorie HallDocument5 pagesTheorie HallAndy BelkaPas encore d'évaluation
- Sociologie de La Douleur Et Des Blessures Sportives Corporelles PDFDocument6 pagesSociologie de La Douleur Et Des Blessures Sportives Corporelles PDFIvánPas encore d'évaluation
- OUTIL 4 Test Drivers Messages ContraignantsDocument4 pagesOUTIL 4 Test Drivers Messages ContraignantsIceberg Training & ConsultingPas encore d'évaluation
- Partie 1 Demarche Qualité Groupe 3Document65 pagesPartie 1 Demarche Qualité Groupe 3Khaled LajmiPas encore d'évaluation