Vous aimerez peut-être aussi
- Chapitre III - Automatique DiscrèteDocument14 pagesChapitre III - Automatique DiscrèteDouaa GhazouaniPas encore d'évaluation
- Série TD N2Document8 pagesSérie TD N2Wã Lïd Sãådät100% (1)
- Chap4 SaeDocument18 pagesChap4 Saesami BoumendjelPas encore d'évaluation
- ChapFinal AsservissmentDocument9 pagesChapFinal AsservissmentChris ShulzPas encore d'évaluation
- partiel_asservissement-2019Document2 pagespartiel_asservissement-2019MelissaPas encore d'évaluation
- TD5 - Correction Des Systèmes Asservis ÉchantillonnésDocument8 pagesTD5 - Correction Des Systèmes Asservis ÉchantillonnésZakaria ZianePas encore d'évaluation
- Etude de Systèmes ÉchantillonnéesDocument9 pagesEtude de Systèmes Échantillonnéessouaf.hedilPas encore d'évaluation
- Chap IV 1Document20 pagesChap IV 1SeVILLA8DzPas encore d'évaluation
- Support Tp1 DV PDFDocument4 pagesSupport Tp1 DV PDFMohamed Vadel MOHAMEDENPas encore d'évaluation
- Chapitre 2 SEDocument9 pagesChapitre 2 SEBadr HamedPas encore d'évaluation
- Exo With Solution Touba s2Document10 pagesExo With Solution Touba s2studyromaissaPas encore d'évaluation
- TD1 CLS2023Document3 pagesTD1 CLS2023Abdelhak MahanePas encore d'évaluation
- Chap 4 Analyses Temporelles Et Frequentielles Des Système FondamentauxDocument15 pagesChap 4 Analyses Temporelles Et Frequentielles Des Système FondamentauxKoum SouloumPas encore d'évaluation
- Exercice 1: Usto-Mb Faculté Génie Électrique Département D'électrotechnique Systèmes Asservis Fiche TD 2Document3 pagesExercice 1: Usto-Mb Faculté Génie Électrique Département D'électrotechnique Systèmes Asservis Fiche TD 2mehdi benouna100% (1)
- TP3 SaleDocument7 pagesTP3 Salenajwa saidaniPas encore d'évaluation
- RattrapageDocument1 pageRattrapagealimaPas encore d'évaluation
- Qqs Notes Sur Placement PolesDocument6 pagesQqs Notes Sur Placement PolesFerhat BOUAMARAPas encore d'évaluation
- EMD2 AsservDocument2 pagesEMD2 AsservalimaPas encore d'évaluation
- Chapitre5 StabiliteDocument7 pagesChapitre5 StabiliteAbdoulrazakPas encore d'évaluation
- PassivitéDocument23 pagesPassivitéMoussa NiatiPas encore d'évaluation
- TD3 ARN v1Document8 pagesTD3 ARN v1mariem ezzinePas encore d'évaluation
- TP2 SALC1 CORREGéDocument17 pagesTP2 SALC1 CORREGéSohaib SaidatPas encore d'évaluation
- Série Rég GM - GIDocument5 pagesSérie Rég GM - GINisrine DaoukiPas encore d'évaluation
- TD CNDocument25 pagesTD CNHasnae Segaoui100% (1)
- Automatique, Informatique Et Informatique Industielle0001Document16 pagesAutomatique, Informatique Et Informatique Industielle0001Ilyass Hani100% (1)
- Td2 Master SanDocument3 pagesTd2 Master SanMahrez DerdoumPas encore d'évaluation
- M1e3a 432 TP4 2022Document9 pagesM1e3a 432 TP4 2022Zineb BouzianePas encore d'évaluation
- Regulation Et Asservissement 1Document4 pagesRegulation Et Asservissement 1TECHNOLOGIES MODERNES DU CAMEROUNPas encore d'évaluation
- Exam CorrDocument12 pagesExam CorrMaria SeltanaPas encore d'évaluation
- TD - 3 NumeriqueDocument2 pagesTD - 3 NumeriqueMouloudPas encore d'évaluation
- Stabilité D'un Système AsserviDocument5 pagesStabilité D'un Système Asservibadro1980Pas encore d'évaluation
- Chapitre 3+TD3Document13 pagesChapitre 3+TD3saidPas encore d'évaluation
- Cours Automatique Discrete Automatique Cours 09 02 10Document29 pagesCours Automatique Discrete Automatique Cours 09 02 10lololeboPas encore d'évaluation
- Commande PolynomialeDocument17 pagesCommande Polynomialenihad abidiPas encore d'évaluation
- TP 2 GMDVDocument6 pagesTP 2 GMDVmewguv Ahmed salekPas encore d'évaluation
- Bode NyquistDocument14 pagesBode NyquistYasmine Ben AbdelkrimPas encore d'évaluation
- Cours - StabilitéDocument18 pagesCours - StabilitéAnouar BenlaqlibPas encore d'évaluation
- Série n3 Com NumDocument7 pagesSérie n3 Com NumGHITA OTHMANEPas encore d'évaluation
- TP 2: Analyse Temporelle Des Systemes Lineaires Utilisation SIMULINKDocument3 pagesTP 2: Analyse Temporelle Des Systemes Lineaires Utilisation SIMULINKbouzida ilyesPas encore d'évaluation
- TP Dut-Etk2 2016Document6 pagesTP Dut-Etk2 2016ibrazizi2000Pas encore d'évaluation
- Le Perceptron Multicouche Back PropagationDocument17 pagesLe Perceptron Multicouche Back PropagationFatima AbdiPas encore d'évaluation
- Devoir Survéillé n2Document2 pagesDevoir Survéillé n2EL Mansour BrahimPas encore d'évaluation
- TP1 SmatiiiDocument9 pagesTP1 SmatiiiTAKOUK HoudaPas encore d'évaluation
- Stabilite Et CorrectionDocument3 pagesStabilite Et CorrectionKämÿ LīäPas encore d'évaluation
- Chapitre 3-4Document63 pagesChapitre 3-4Aya BalegiPas encore d'évaluation
- Automatique-Échanti TD 0910Document18 pagesAutomatique-Échanti TD 0910EA BeatszPas encore d'évaluation
- 1/ Objectifs Du TP:: Tabilite Des Systemes AsservisDocument3 pages1/ Objectifs Du TP:: Tabilite Des Systemes Asservisbouzida ilyesPas encore d'évaluation
- Chapitre 4Document9 pagesChapitre 4alimaPas encore d'évaluation
- Mai_2015 (2)Document6 pagesMai_2015 (2)Ali brahim MahamatPas encore d'évaluation
- Résumé Stabilité Syst DiscretsDocument3 pagesRésumé Stabilité Syst DiscretsSàmi BmPas encore d'évaluation
- Examaster 20Document3 pagesExamaster 20sdik aichaPas encore d'évaluation
- Exercice de Revision BisDocument2 pagesExercice de Revision BisMohamed SalamaPas encore d'évaluation
- Chapitre IIDocument7 pagesChapitre IIkima lachgarPas encore d'évaluation
- Compte-Rendu TP3 Section 4 &5Document16 pagesCompte-Rendu TP3 Section 4 &5Roua RourouPas encore d'évaluation
- TDN°1Document4 pagesTDN°1samad marPas encore d'évaluation
- Compte Rendu Tpau3Document23 pagesCompte Rendu Tpau3Mouhamed AmarPas encore d'évaluation
- Cours de Systemes AsservisDocument82 pagesCours de Systemes Asserviselectroblida86% (7)
- Ecop 149 0029Document23 pagesEcop 149 0029Hemza SellamnaPas encore d'évaluation
- Exercice:: S R C SDocument3 pagesExercice:: S R C SHemza SellamnaPas encore d'évaluation
- Conducteur SDocument16 pagesConducteur Srex242Pas encore d'évaluation
- Cours4-Moteur AsynchroneDocument10 pagesCours4-Moteur AsynchroneFakhri Ghrairi100% (1)
- Accompagnement PdagogiqueDocument15 pagesAccompagnement PdagogiqueHemza SellamnaPas encore d'évaluation
- Controle BFDocument29 pagesControle BFkyller21Pas encore d'évaluation
- Bulletin 024 05Document2 pagesBulletin 024 05Hemza SellamnaPas encore d'évaluation
- Co RaDocument88 pagesCo RaZaroui Benamor AliPas encore d'évaluation
- Polycopie D Rached PDFDocument57 pagesPolycopie D Rached PDFهبة الرحمانPas encore d'évaluation
- CP ExercicesDocument14 pagesCP ExercicesHemza SellamnaPas encore d'évaluation
- Travaux Dirigés Régulation Industrielle 18Document15 pagesTravaux Dirigés Régulation Industrielle 18Souhaib Louda100% (1)
- Chapitre 1.4 Thyristor, Triac, GTO: Électronique de Puissance "Composants"Document27 pagesChapitre 1.4 Thyristor, Triac, GTO: Électronique de Puissance "Composants"Hemza SellamnaPas encore d'évaluation
- PFE1011Document70 pagesPFE1011Hemza SellamnaPas encore d'évaluation
- c05b Moteurs AutresDocument34 pagesc05b Moteurs AutresHemza SellamnaPas encore d'évaluation
- Les Thèmes Du Dalf C1Document28 pagesLes Thèmes Du Dalf C1Ioana Babarus100% (1)
- Item 362 - AesDocument4 pagesItem 362 - AesSofia RhellabPas encore d'évaluation
- Enquête de Fréquentation Culturelle 2015 PDFDocument35 pagesEnquête de Fréquentation Culturelle 2015 PDFilikesummer1234Pas encore d'évaluation
- Cours OrdonnacementDocument17 pagesCours OrdonnacementMed ArefPas encore d'évaluation
- Cours 3 ProthèseDocument4 pagesCours 3 ProthèseDDan2005Pas encore d'évaluation
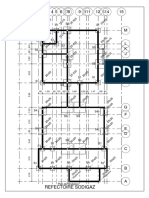
- Structure REFECTOIRE SODIGAZ PDFDocument44 pagesStructure REFECTOIRE SODIGAZ PDFheheheyPas encore d'évaluation
- CPS ClimatisationDocument2 pagesCPS Climatisationilyass tourkiPas encore d'évaluation
- Estem: Eau Dans Le SolDocument27 pagesEstem: Eau Dans Le SolAlli BoukhchPas encore d'évaluation
- Cas IS AmortissementsDocument3 pagesCas IS AmortissementsT. AndersonPas encore d'évaluation
- Catalogue PHOTOFLEX en FrancaisDocument26 pagesCatalogue PHOTOFLEX en FrancaisAllanlitwinPas encore d'évaluation
- Distr ProbaDocument37 pagesDistr ProbaOumaima OughnimaPas encore d'évaluation
- Methode de TravailDocument2 pagesMethode de Travailamal akhoulouPas encore d'évaluation
- Examples Questions Examen AcoustiqueDocument4 pagesExamples Questions Examen AcoustiquePierreFontenellePas encore d'évaluation
- Cours de Gestion de Production 1.2.3 Gmp2 VPDocument30 pagesCours de Gestion de Production 1.2.3 Gmp2 VPMohamed SabrePas encore d'évaluation
- AUguste Blanqui L'Éternité Par Les AstresDocument79 pagesAUguste Blanqui L'Éternité Par Les AstresYvan KalievPas encore d'évaluation
- NF EN 1993-1-7 NA Aout 2008Document4 pagesNF EN 1993-1-7 NA Aout 2008fauvyPas encore d'évaluation
- Is - Corrigé de L - Étude de Cas Ayda (Version 2016)Document5 pagesIs - Corrigé de L - Étude de Cas Ayda (Version 2016)Hicham DaouchPas encore d'évaluation
- Matièreexamen 4 Ème Aet DDocument6 pagesMatièreexamen 4 Ème Aet DToby 17Pas encore d'évaluation
- Hygiène HospitalièreDocument4 pagesHygiène HospitalièreJamal MalouPas encore d'évaluation
- Karim, Ousmane Socé PDFDocument27 pagesKarim, Ousmane Socé PDFL’unique SuperboyPas encore d'évaluation
- S o Mortaiseuse MechesDocument2 pagesS o Mortaiseuse Mechesp bwPas encore d'évaluation
- Jeremie Gouyon Ok-2Document289 pagesJeremie Gouyon Ok-2leucinedijaPas encore d'évaluation
- TIG Ta33 Panneau de Commande FRDocument22 pagesTIG Ta33 Panneau de Commande FRk.a55Pas encore d'évaluation
- Sup'air SellettesDocument1 pageSup'air SellettesStefanoPas encore d'évaluation
- ToyotismeDocument4 pagesToyotismeAbdelkarimPas encore d'évaluation
- Dictionnaire Amoureux Des Dieux Et Des DéessesDocument273 pagesDictionnaire Amoureux Des Dieux Et Des DéessesKone Assane100% (1)
- Page D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningDocument1 pagePage D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningzhcczgfbmwPas encore d'évaluation
- Act2 1Document4 pagesAct2 1nassima ghallabiPas encore d'évaluation
- PDFDocument24 pagesPDFCompétitionPas encore d'évaluation
- Mur Types PDFDocument76 pagesMur Types PDFWafaa ElyaâgoubiPas encore d'évaluation