Vous aimerez peut-être aussi
- TD 4 (Ex & Sol)Document18 pagesTD 4 (Ex & Sol)aymen sayoud50% (2)
- TD N°4 Représentation Des SLCI FT Schémas Blocs SLCI Asservis 1 PDFDocument4 pagesTD N°4 Représentation Des SLCI FT Schémas Blocs SLCI Asservis 1 PDFseye abdou aziz50% (2)
- TD Asservissement ÉchantillonnésDocument7 pagesTD Asservissement ÉchantillonnésTamokoue75% (4)
- Série TD N2Document8 pagesSérie TD N2Wã Lïd Sãådät100% (1)
- Exercices Systèmes ÉchantillonnésDocument2 pagesExercices Systèmes ÉchantillonnésAsmaa Alaoui100% (3)
- TD 3 (Ex & Sol)Document15 pagesTD 3 (Ex & Sol)Lina Snow92% (24)
- Onduleurs Et Variation de Vitesse PSIMDocument9 pagesOnduleurs Et Variation de Vitesse PSIMdarknight100% (1)
- Identification Et Mise en Évidence Des Formations Hydrogéologiques de La Wilaya de KhenchelaDocument133 pagesIdentification Et Mise en Évidence Des Formations Hydrogéologiques de La Wilaya de KhenchelaKHELIFA100% (3)
- TD CNDocument25 pagesTD CNHasnae Segaoui100% (1)
- Série Rég GM - GIDocument5 pagesSérie Rég GM - GINisrine DaoukiPas encore d'évaluation
- TD Système Ordre 1 PDFDocument5 pagesTD Système Ordre 1 PDFJribi TalelPas encore d'évaluation
- 144 Tdautomatique Tsi SpeDocument4 pages144 Tdautomatique Tsi SpeYoussef SadikPas encore d'évaluation
- TD Automatique 1A JMD 2011Document20 pagesTD Automatique 1A JMD 2011Hajri MohamedPas encore d'évaluation
- TD Automatique 1A 2016 JMD 2Document20 pagesTD Automatique 1A 2016 JMD 2Adil ChentoufPas encore d'évaluation
- TD Automatique 1A 2016 JMDDocument20 pagesTD Automatique 1A 2016 JMDFaïssolath Achirou100% (1)
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- TD Auto Asservissement Echantillonne L3EMDocument3 pagesTD Auto Asservissement Echantillonne L3EMSanhouidi StephanePas encore d'évaluation
- TD Automatique INSADocument7 pagesTD Automatique INSASalah Eddine EL AbbadiPas encore d'évaluation
- TD N°2 PDFDocument2 pagesTD N°2 PDFAbdou VerrattiPas encore d'évaluation
- TD Automatique ÉchantillonnéeDocument2 pagesTD Automatique ÉchantillonnéeAli MansouriPas encore d'évaluation
- Série TD N°2Document2 pagesSérie TD N°2Wã Lïd SãådätPas encore d'évaluation
- TD02Document3 pagesTD02zaynPas encore d'évaluation
- TD1 (Ex & Sol)Document18 pagesTD1 (Ex & Sol)Younes Raache75% (4)
- TD Automatique NumériqueDocument5 pagesTD Automatique NumériquedhdhPas encore d'évaluation
- Sujets TD AutomatiqueDocument51 pagesSujets TD Automatiquekarim belaliaPas encore d'évaluation
- Examen Examen de Rattrapage de Regulation Et Asservissement s4 2016 2015 PDFDocument1 pageExamen Examen de Rattrapage de Regulation Et Asservissement s4 2016 2015 PDFÂÿâčhê Îsmâïl100% (1)
- Etude Du Système Du Second Ordre: Exercice 1Document2 pagesEtude Du Système Du Second Ordre: Exercice 1sarah wiwiPas encore d'évaluation
- Poly TD-Regul NumDocument12 pagesPoly TD-Regul NumIslam BensediraPas encore d'évaluation
- Commade Des Système Linéaires TD1Document2 pagesCommade Des Système Linéaires TD1Grine Salah Eddine100% (1)
- 1a Automatique Tds OldDocument59 pages1a Automatique Tds OldredaPas encore d'évaluation
- Compte Rendu Tp02 MisDocument14 pagesCompte Rendu Tp02 Mismi doPas encore d'évaluation
- Correction - TD Automatique NumériqueDocument19 pagesCorrection - TD Automatique Numériquedhdh100% (2)
- TD 8 - CorrecteursDocument2 pagesTD 8 - CorrecteursRayane HmzPas encore d'évaluation
- Correction TD N°1 Systèmes ÉchantillonnésDocument4 pagesCorrection TD N°1 Systèmes Échantillonnésba 3uPas encore d'évaluation
- 2020 - 2021 - Examen Représentation D'état - V - 05-06-2021Document2 pages2020 - 2021 - Examen Représentation D'état - V - 05-06-2021KooraNow HD67% (3)
- Document Réponse TP2 PID - Num 2022 - 2023Document10 pagesDocument Réponse TP2 PID - Num 2022 - 2023Zerrouk AthmanPas encore d'évaluation
- Exercices Automatique 2016Document19 pagesExercices Automatique 2016AbdElKrim100% (3)
- Chapitre2 Fonction de Transfert Et Asservissement Echantillonne-2020Document12 pagesChapitre2 Fonction de Transfert Et Asservissement Echantillonne-2020I C H I G OPas encore d'évaluation
- Correction-TD - Système Du Second Ordre - AII3Document8 pagesCorrection-TD - Système Du Second Ordre - AII32TowPas encore d'évaluation
- Asservi SerieDocument34 pagesAsservi SerieNoussaPas encore d'évaluation
- Examen Principal SALC 3EMA - Novembre2017Document5 pagesExamen Principal SALC 3EMA - Novembre2017djamilPas encore d'évaluation
- TD Comav 2020Document12 pagesTD Comav 2020Oussama LazebPas encore d'évaluation
- Support de Cours SAE PDFDocument82 pagesSupport de Cours SAE PDFIbrahim El Khalil Yettar50% (2)
- Correction Des Systèmes Asservis Linéaires ContinusDocument13 pagesCorrection Des Systèmes Asservis Linéaires ContinusCeh DjamelPas encore d'évaluation
- TP 4 Matlab-SimulinkDocument6 pagesTP 4 Matlab-SimulinkBelhamidi Mohammed HoussamePas encore d'évaluation
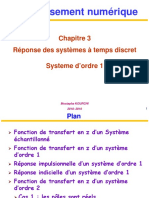
- Asservissement Numérique: Réponse Des Systèmes À Temps Discret Systeme D'ordre 1 Chapitre 3Document20 pagesAsservissement Numérique: Réponse Des Systèmes À Temps Discret Systeme D'ordre 1 Chapitre 3Radouan RadwanPas encore d'évaluation
- Exercice 1 Un Hacheur Alimente Depuis UneDocument3 pagesExercice 1 Un Hacheur Alimente Depuis Unejmimil100% (1)
- Systeme Asservie (Asservissement)Document18 pagesSysteme Asservie (Asservissement)Ikram Ikram100% (1)
- Exam Machine ElectriqueDocument4 pagesExam Machine ElectriqueAYMEN BOUJEMELPas encore d'évaluation
- Série 1Document6 pagesSérie 1DiopPas encore d'évaluation
- Compte Rendu - TP3 SADJI Ramy 181831064076Document5 pagesCompte Rendu - TP3 SADJI Ramy 181831064076Ramy SdjPas encore d'évaluation
- EMD2 AsservDocument2 pagesEMD2 AsservalimaPas encore d'évaluation
- TDN°1Document4 pagesTDN°1samad marPas encore d'évaluation
- TD NumDocument2 pagesTD NumLeroy Lionel SonfackPas encore d'évaluation
- Chapitre 2 Fonction Detransfert Et Asservissement Echantillonne-Zidani FatihaDocument18 pagesChapitre 2 Fonction Detransfert Et Asservissement Echantillonne-Zidani FatihaOumaymaPas encore d'évaluation
- Série 1Document2 pagesSérie 1Ahbar abdellahPas encore d'évaluation
- Exercice de Revision BisDocument2 pagesExercice de Revision BisMohamed SalamaPas encore d'évaluation
- TD CNSDocument3 pagesTD CNSHim Ibrah100% (1)
- TD Regul PDFDocument11 pagesTD Regul PDFSouhaib LoudaPas encore d'évaluation
- ch1 Cours Fiabilite Et Maintenance Des Systèmes ElectroniquesDocument5 pagesch1 Cours Fiabilite Et Maintenance Des Systèmes ElectroniquesMahrez DerdoumPas encore d'évaluation
- Cours 2 RDCMDocument8 pagesCours 2 RDCMMahrez DerdoumPas encore d'évaluation
- Rapport de BiocapteurDocument5 pagesRapport de BiocapteurMahrez DerdoumPas encore d'évaluation
- Cours 3 RDCMDocument4 pagesCours 3 RDCMMahrez DerdoumPas encore d'évaluation
- Emd Elt 2009Document10 pagesEmd Elt 2009Mahrez DerdoumPas encore d'évaluation
- Cours 2 - Partie1Document24 pagesCours 2 - Partie1Mahrez DerdoumPas encore d'évaluation
- TD04 Exo7 10Document16 pagesTD04 Exo7 10Mahrez DerdoumPas encore d'évaluation
- C4a - Poly - Instrustions DiversesDocument4 pagesC4a - Poly - Instrustions DiversesMahrez DerdoumPas encore d'évaluation
- C5a-Poly - Instructions ChainesDocument2 pagesC5a-Poly - Instructions ChainesMahrez DerdoumPas encore d'évaluation
- Notions de CEMDocument21 pagesNotions de CEMMahrez DerdoumPas encore d'évaluation
- Systeme A Up TP1Document3 pagesSysteme A Up TP1Mahrez DerdoumPas encore d'évaluation
- Chapitre 6Document7 pagesChapitre 6Mahrez Derdoum100% (1)
- C2 - Structure Generale D'un Micro-OrdinateurDocument4 pagesC2 - Structure Generale D'un Micro-OrdinateurMahrez DerdoumPas encore d'évaluation
- Cours RCI - Bus - CAN - 2Document31 pagesCours RCI - Bus - CAN - 2Mahrez DerdoumPas encore d'évaluation
- c3b Bis - Lea, Loop, CMP, JMPDocument19 pagesc3b Bis - Lea, Loop, CMP, JMPMahrez DerdoumPas encore d'évaluation
- Arduino Memoire RobotDocument49 pagesArduino Memoire RobotMahrez Derdoum50% (2)
- Cours RCI - Bus - CAN - 1Document29 pagesCours RCI - Bus - CAN - 1Mahrez DerdoumPas encore d'évaluation
- Dzexams 1as Francais 829281Document3 pagesDzexams 1as Francais 829281Zakia Lechhab-laidaniPas encore d'évaluation
- Book PBCF FR WebDocument70 pagesBook PBCF FR WebMorgane patrick EffoutamePas encore d'évaluation
- Contrat Type ArchitecteDocument19 pagesContrat Type ArchitecteAdel ShatlaPas encore d'évaluation
- EBOOK Melanie Milburne - Le Souffle de La Passion PDFDocument84 pagesEBOOK Melanie Milburne - Le Souffle de La Passion PDFLaali Christy67% (3)
- CAO - FAO À 5 Axes (Partie2)Document295 pagesCAO - FAO À 5 Axes (Partie2)Hanane TounsiPas encore d'évaluation
- MonEtiquetteRetour NA2305191713144 2Document2 pagesMonEtiquetteRetour NA2305191713144 2HADANGUE ChristopherPas encore d'évaluation
- Cours 2Document25 pagesCours 2jpPas encore d'évaluation
- Les Génies de La Science (Vol1) - DarwinDocument98 pagesLes Génies de La Science (Vol1) - Darwinuser scribdPas encore d'évaluation
- Métier de FormationDocument2 pagesMétier de FormationRanto Andriampenitra RasoamanambolaPas encore d'évaluation
- 7a - Note D'information Accueil Au Restaurant Scolaire 2022 2023Document2 pages7a - Note D'information Accueil Au Restaurant Scolaire 2022 2023cpd boualitPas encore d'évaluation
- Bulletin Kine N°25Document32 pagesBulletin Kine N°25Arzhel MideletPas encore d'évaluation
- Approches Theoriques en Analyse de Polit PDFDocument34 pagesApproches Theoriques en Analyse de Polit PDFJean KoffiPas encore d'évaluation
- Guide en 4 Étapes Pour Rejoindre DIGICALL PARTNERDocument1 pageGuide en 4 Étapes Pour Rejoindre DIGICALL PARTNERalaesahbouPas encore d'évaluation
- (PFS) (TD) PalanDocument2 pages(PFS) (TD) PalanHachmiPas encore d'évaluation
- Olimpiada Franceza Model SubiectDocument17 pagesOlimpiada Franceza Model SubiectD.IPas encore d'évaluation
- ES Antragsformular FRDocument2 pagesES Antragsformular FRVincent KirchhofPas encore d'évaluation
- Procedures D'executionDocument30 pagesProcedures D'executionVirane DantonPas encore d'évaluation
- Memo Lean Six SigmaDocument1 pageMemo Lean Six SigmamehdiPas encore d'évaluation
- Voigtlander Vito B-FrenchDocument33 pagesVoigtlander Vito B-FrenchCristina LonardoniPas encore d'évaluation
- Undp CMR Canevas Projet GEF SGP FrançaisDocument13 pagesUndp CMR Canevas Projet GEF SGP Françaisking azPas encore d'évaluation
- EXERCICEDocument5 pagesEXERCICEMarius DimaPas encore d'évaluation
- Le Marketing Social: Un Oxymore Qui A Du Sens ? : Module Interprofessionnel de Santé PubliqueDocument40 pagesLe Marketing Social: Un Oxymore Qui A Du Sens ? : Module Interprofessionnel de Santé PubliqueMeryam MeryPas encore d'évaluation
- 14 Principes de GestionDocument4 pages14 Principes de Gestionayman akroPas encore d'évaluation
- Asturias Leyenda AlbenizDocument7 pagesAsturias Leyenda AlbenizRavodPas encore d'évaluation
- ATOUTS - Difficultes Du GabonDocument1 pageATOUTS - Difficultes Du GabonmbimbodevdasPas encore d'évaluation
- CPS D'achevement Lot 09Document169 pagesCPS D'achevement Lot 09Abdellah MarniPas encore d'évaluation
- 3 - Demarche InvestigationDocument12 pages3 - Demarche InvestigationMataraPas encore d'évaluation
- 59 PDFDocument2 pages59 PDFBastien RabierPas encore d'évaluation
- Autorisation Travail Permis AssociéDocument14 pagesAutorisation Travail Permis AssociéHamid Bouleghab100% (1)