Vous aimerez peut-être aussi
- Diff Structure MOCNDocument72 pagesDiff Structure MOCNdayzen jiffPas encore d'évaluation
- Les Machines CNCDocument10 pagesLes Machines CNCCHAYMAA HAMIDIPas encore d'évaluation
- Fabrication Assistée Par OrdinateurDocument40 pagesFabrication Assistée Par OrdinateurhelmimannaiPas encore d'évaluation
- Fiche Ate Techniques de Genie MecaniqueDocument2 pagesFiche Ate Techniques de Genie MecaniqueMak Ad100% (1)
- Les Machines Outils CNCDocument28 pagesLes Machines Outils CNCHfgjjPas encore d'évaluation
- 03.ProgrammationISO GMTMM2 PDFDocument14 pages03.ProgrammationISO GMTMM2 PDFBentchikou MohPas encore d'évaluation
- Compte Rendu FCNDocument11 pagesCompte Rendu FCNYassinePas encore d'évaluation
- Qu'est-Ce Que NC?: Composants Des Systèmes CN TraditionnelsDocument14 pagesQu'est-Ce Que NC?: Composants Des Systèmes CN Traditionnelsdettlaff xxxPas encore d'évaluation
- Mocn 2 PDFDocument46 pagesMocn 2 PDFBentchikou MohPas encore d'évaluation
- Cours Prog - 2 PDFDocument120 pagesCours Prog - 2 PDFmahergarfa90% (10)
- Machines-Outils A Commande NumeriqueDocument32 pagesMachines-Outils A Commande NumeriqueBangaly FOFANAPas encore d'évaluation
- Éléments D'usinage Et Métrologie Dimensionnelle TCH040: Cours 2Document45 pagesÉléments D'usinage Et Métrologie Dimensionnelle TCH040: Cours 2raouanemezianiPas encore d'évaluation
- Fabrication Industrielle-Chapitre 5Document31 pagesFabrication Industrielle-Chapitre 5iraoui jamal (Ebay)Pas encore d'évaluation
- 5axes CNCDocument120 pages5axes CNCBoutef El HachemiPas encore d'évaluation
- Cours de MOCNDocument71 pagesCours de MOCNHouari Pachika91% (11)
- Programmation Dun Centre Dusinage CNDocument73 pagesProgrammation Dun Centre Dusinage CNSamir2020Pas encore d'évaluation
- CH 4 Gindus Généralités MocnDocument41 pagesCH 4 Gindus Généralités MocnMeryem JanatiPas encore d'évaluation
- 5GMCIP Cours FAO Etudiants PDFDocument75 pages5GMCIP Cours FAO Etudiants PDFtuan viet nguyenPas encore d'évaluation
- Commande Numerique CoursDocument206 pagesCommande Numerique Coursmassilia1320017020100% (5)
- Tlija2012cours FAO - Leçon3 Et 4Document91 pagesTlija2012cours FAO - Leçon3 Et 4Permaflex Route Bekalta TeboulbaPas encore d'évaluation
- Cours MOCN - IIT 2023 CH1 12-02-2023Document16 pagesCours MOCN - IIT 2023 CH1 12-02-2023benchikh lindaPas encore d'évaluation
- MOCN PPT 2020Document72 pagesMOCN PPT 2020redwane ouberri100% (1)
- Cours 1 MEC3530 A2010Document18 pagesCours 1 MEC3530 A2010xevniPas encore d'évaluation
- Brochure Usinage Grande VitesseDocument12 pagesBrochure Usinage Grande VitesseJacine BK100% (1)
- Chapitre I Automatisation Des MODocument16 pagesChapitre I Automatisation Des MOMehdi HassinePas encore d'évaluation
- Cfao 2021-1Document72 pagesCfao 2021-1AmiNEPas encore d'évaluation
- Chapitre 1 Generalites Machines Outils Commande NumeriqueDocument21 pagesChapitre 1 Generalites Machines Outils Commande NumeriqueRayan Benachour75% (4)
- Chapitre 1 Machines Outils Commande NumeriqueDocument14 pagesChapitre 1 Machines Outils Commande NumeriqueMohamed Sahil0% (1)
- CH1-Fabrication Assistée Par OrdinateurDocument37 pagesCH1-Fabrication Assistée Par OrdinateurAbbassi KarimPas encore d'évaluation
- CNC2016 Chapitre 1 Architecture Des MCN PDFDocument101 pagesCNC2016 Chapitre 1 Architecture Des MCN PDFImèn JndoubiPas encore d'évaluation
- Catia v5 Machining Brochure FRDocument8 pagesCatia v5 Machining Brochure FRCharradi ZakariaPas encore d'évaluation
- Cours CNDocument22 pagesCours CNghizlane lydia yahiaPas encore d'évaluation
- Chapitre II - 1Document15 pagesChapitre II - 1KhaLed BenKaPas encore d'évaluation
- Tour CNCDocument17 pagesTour CNCOussemaPas encore d'évaluation
- Machines-Outils Diap15Document51 pagesMachines-Outils Diap15nada mojahidPas encore d'évaluation
- Cours 11111Document15 pagesCours 11111Lotfi KheggarPas encore d'évaluation
- Formation Des Techniciens Moulerie MocnDocument10 pagesFormation Des Techniciens Moulerie MocnJasser AmamaPas encore d'évaluation
- 4.machines-Outils Partie 1Document25 pages4.machines-Outils Partie 1Billy BignakePas encore d'évaluation
- Cours - Cfao - Benzaama - CopieDocument18 pagesCours - Cfao - Benzaama - Copieanasidy4Pas encore d'évaluation
- Présentation2 MedbossDocument25 pagesPrésentation2 Medbossiheb lansariPas encore d'évaluation
- M05 Usinage PDFDocument188 pagesM05 Usinage PDFMajda El Aouni100% (1)
- Cours CFAO-ESPRIM - 2019-2eme PartieDocument33 pagesCours CFAO-ESPRIM - 2019-2eme Partiejunior NgoyoPas encore d'évaluation
- Fraisage Et Tournage PDFDocument99 pagesFraisage Et Tournage PDFMohamed SahilPas encore d'évaluation
- 591 147-31Document12 pages591 147-31Elmoutawakil_H_7039Pas encore d'évaluation
- TP Tournage S1Document22 pagesTP Tournage S1Naoufel Fares100% (3)
- Catia 4-Page FrenchDocument4 pagesCatia 4-Page FrenchYoussri Ben MoussaPas encore d'évaluation
- MachinesProf TourDocument7 pagesMachinesProf Tourlulu3232Pas encore d'évaluation
- Chapitre 1 Machines Outils Commande NumeriqueDocument14 pagesChapitre 1 Machines Outils Commande NumeriqueRoua KhalifaPas encore d'évaluation
- Méthodologies de ConceptionDocument138 pagesMéthodologies de ConceptionAziz Tu0% (1)
- 1-Production Par CN2!26!03-2020 Ch1Document34 pages1-Production Par CN2!26!03-2020 Ch1jasseramamaPas encore d'évaluation
- Manuel d'apprentissage de la programmation 3D: avec C#5, WPF et Visual Studio 2013D'EverandManuel d'apprentissage de la programmation 3D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantÉvaluation : 5 sur 5 étoiles5/5 (2)
- Projets du Futur : Guide Complet des Méthodes de Conduite InnovantesD'EverandProjets du Futur : Guide Complet des Méthodes de Conduite InnovantesPas encore d'évaluation
- Angular V2 : Maîtrisez le Développement d'Applications Web ModernesD'EverandAngular V2 : Maîtrisez le Développement d'Applications Web ModernesPas encore d'évaluation
- Formation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesD'EverandFormation 3D par la pratique avec C#5 et WPF: Modeliser des moleculesPas encore d'évaluation
- Planification et contrôle de la production et des stocks : techniques et pratiquesD'EverandPlanification et contrôle de la production et des stocks : techniques et pratiquesÉvaluation : 3 sur 5 étoiles3/5 (1)
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013D'EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation
- Chap 024Document66 pagesChap 024Nour FisliPas encore d'évaluation
- Chapitre 2Document27 pagesChapitre 2Nour FisliPas encore d'évaluation
- Chap 023Document36 pagesChap 023Nour FisliPas encore d'évaluation
- Chapitre 1Document24 pagesChapitre 1Nour FisliPas encore d'évaluation
- Chapitre III Systèmes HyperstqueDocument4 pagesChapitre III Systèmes HyperstqueNour FisliPas encore d'évaluation
- Chapitre II Chaine CinématiqueDocument12 pagesChapitre II Chaine CinématiqueNour FisliPas encore d'évaluation
- Chapitre II Combustion Et CombustiblesDocument19 pagesChapitre II Combustion Et CombustiblesNour FisliPas encore d'évaluation
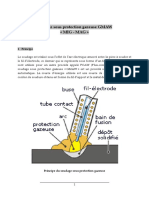
- 4 Soudage Sous Protection GazeuseDocument2 pages4 Soudage Sous Protection GazeuseNour FisliPas encore d'évaluation
- Chap 1 Flexion DéviéeDocument14 pagesChap 1 Flexion DéviéeNour Fisli100% (1)
- Serveur WES Installation V2Document14 pagesServeur WES Installation V2Johann LelandaisPas encore d'évaluation
- Jeux D'ombresDocument388 pagesJeux D'ombresArnaud BallPas encore d'évaluation
- Energies RenouvelablesDocument16 pagesEnergies RenouvelablesMohamed WarkzizPas encore d'évaluation
- Liste Fournitures Scolaires CE1 2023 2024 1Document3 pagesListe Fournitures Scolaires CE1 2023 2024 1diagonale ecolePas encore d'évaluation
- Poétique D'aristote (Nouv Éd Rev (... ) Aristote (0384-0322 bpt6k70607gDocument57 pagesPoétique D'aristote (Nouv Éd Rev (... ) Aristote (0384-0322 bpt6k70607gCapela da FilôPas encore d'évaluation
- Studio Mumbai, Bijoy & Priya Jain, ArchitectesDocument12 pagesStudio Mumbai, Bijoy & Priya Jain, Architectesben_65Pas encore d'évaluation
- Busch Instruction Manual KB KC 0040 D FR 0870152114 PDFDocument22 pagesBusch Instruction Manual KB KC 0040 D FR 0870152114 PDFaziz youssfiPas encore d'évaluation
- Embaucher Un Salarie en Elevage VF Maj2016Document16 pagesEmbaucher Un Salarie en Elevage VF Maj2016gyressestellaPas encore d'évaluation
- Epreuv Bac A 2012Document1 pageEpreuv Bac A 2012FOGNO FOTSOPas encore d'évaluation
- La Médecine Des Pharaons. Magie Et Science Médicale Dans L'égypte AncienneDocument27 pagesLa Médecine Des Pharaons. Magie Et Science Médicale Dans L'égypte AncienneGuillermo Benitez100% (3)
- TP ExtractionDocument6 pagesTP ExtractionInes DaoudiPas encore d'évaluation
- Gestion de StockDocument6 pagesGestion de Stockexpert diag autoPas encore d'évaluation
- Cas CliniqueDocument3 pagesCas Cliniquesamyktg44Pas encore d'évaluation
- Oral Français LL4 - Vénus AnadyomèneDocument6 pagesOral Français LL4 - Vénus Anadyomènejulie khavathPas encore d'évaluation
- Mieux Comprendre LDocument5 pagesMieux Comprendre LAchraf CpnPas encore d'évaluation
- Bac 2014 Bac Tech Epreuve Physique Session Controle Correction PDFDocument5 pagesBac 2014 Bac Tech Epreuve Physique Session Controle Correction PDFmomme deyahiPas encore d'évaluation
- Correction TD Alzheimer (Début)Document4 pagesCorrection TD Alzheimer (Début)kettouchePas encore d'évaluation
- Devoir de Contrôle N°3 - SVT - 2ème SC (2006-2007) Mme Habli RajaDocument3 pagesDevoir de Contrôle N°3 - SVT - 2ème SC (2006-2007) Mme Habli RajaChihab GhlalaPas encore d'évaluation
- EVCP OphtalmoDocument31 pagesEVCP OphtalmoBouchoucha SakrPas encore d'évaluation
- Soutenance Projet EI5 - Ruche IntelligenteDocument34 pagesSoutenance Projet EI5 - Ruche IntelligenteTMauginPas encore d'évaluation
- Plan de Visite 2018Document2 pagesPlan de Visite 2018Benoît AgassantPas encore d'évaluation
- Franc 5kl Ch1 Vadushina Rus Bel 2020Document139 pagesFranc 5kl Ch1 Vadushina Rus Bel 2020Мария МисюкPas encore d'évaluation
- 4e Classe, Partie A, Questions de RévisionDocument335 pages4e Classe, Partie A, Questions de RévisionScribdTranslationsPas encore d'évaluation
- 3 CCTP HEM BatimentDocument197 pages3 CCTP HEM BatimentGosson Yenipoho Aboubacar SoroPas encore d'évaluation
- La Technique "S'efface"Document20 pagesLa Technique "S'efface"TRIBYPas encore d'évaluation
- P1AR00 - Captain Jacks Restaurant PiratesDocument28 pagesP1AR00 - Captain Jacks Restaurant PiratesBruce TandirePas encore d'évaluation
- Microbiologie PrédictiveDocument9 pagesMicrobiologie Prédictivevague20000% (1)
- (Géopolitique Mondiale) Wenu Becker - Diplomatie Et Sécurité en RDC de 1960 À 1965-L'Harmattan (2017)Document141 pages(Géopolitique Mondiale) Wenu Becker - Diplomatie Et Sécurité en RDC de 1960 À 1965-L'Harmattan (2017)Matthieu MatiyaboPas encore d'évaluation
- Ilford Fp4 PlusDocument6 pagesIlford Fp4 PlusMatthieu BEGELPas encore d'évaluation