Vous aimerez peut-être aussi
- DS3. 1 - EQUILIBREUSE DE ROUE Le Schéma Cinématique D'une Équilibreuse de Roue de Véhicule Est Donné Ci-Dessous. X, y ZDocument14 pagesDS3. 1 - EQUILIBREUSE DE ROUE Le Schéma Cinématique D'une Équilibreuse de Roue de Véhicule Est Donné Ci-Dessous. X, y ZMecprtAna100% (1)
- TD Statique - Skip de Lavage CorrigéDocument2 pagesTD Statique - Skip de Lavage CorrigéThierry MarvynPas encore d'évaluation
- Cours Sur Les StructuresDocument29 pagesCours Sur Les Structuresapi-302372012Pas encore d'évaluation
- Le Barycentre Dans Le Plan Cours 1Document7 pagesLe Barycentre Dans Le Plan Cours 1thomsen azizPas encore d'évaluation
- DS N°3 - Banc D'épreuve Hydraulique (Corrigé) PDFDocument8 pagesDS N°3 - Banc D'épreuve Hydraulique (Corrigé) PDFElmehdi ElmessaoudiPas encore d'évaluation
- Bouzouraa Chaouki: Exercices Corrigés ProbabilitésDocument20 pagesBouzouraa Chaouki: Exercices Corrigés Probabilitéssis yphePas encore d'évaluation
- Systeme Soumis A 3 Forces ProfDocument2 pagesSysteme Soumis A 3 Forces ProfFOFANAPas encore d'évaluation
- Archi1an Physique-BarycentresDocument7 pagesArchi1an Physique-BarycentresYa CinePas encore d'évaluation
- Mecanique 1BTSDocument30 pagesMecanique 1BTSKonan Wilfried100% (1)
- Fo3 Lire La Representation Graphique D'une FonctionDocument1 pageFo3 Lire La Representation Graphique D'une FonctionBergui JamalPas encore d'évaluation
- 7 Cours Du Moment de ForceDocument5 pages7 Cours Du Moment de Forcephytanja100% (1)
- CNC MP Physique 2 2011c2Document15 pagesCNC MP Physique 2 2011c2Mounir LahraichiPas encore d'évaluation
- Statique - Exercices Divers ELEVEDocument2 pagesStatique - Exercices Divers ELEVEOussama ZagharPas encore d'évaluation
- 2s BarycentreDocument2 pages2s BarycentreIsmaila MbodjPas encore d'évaluation
- Annexe 05 - Calcul VectorielDocument4 pagesAnnexe 05 - Calcul Vectorielameg15Pas encore d'évaluation
- Solide en Rotation CoursDocument4 pagesSolide en Rotation CoursMehdi BnmssdPas encore d'évaluation
- M2103 - TD3 - CinématiqueDocument4 pagesM2103 - TD3 - CinématiqueClément DuvalPas encore d'évaluation
- LOI DE LAPLACE - Validé PDFDocument5 pagesLOI DE LAPLACE - Validé PDFJizreel DiabatéPas encore d'évaluation
- FormulesDocument5 pagesFormuleshajarPas encore d'évaluation
- LTDE Série D'exercice Corrigé Cisaillement 02-28-2024Document5 pagesLTDE Série D'exercice Corrigé Cisaillement 02-28-2024Thierry MarvynPas encore d'évaluation
- TD2 CorrectionDocument4 pagesTD2 CorrectionAmayas BerdousPas encore d'évaluation
- Fonction Affine 2Document12 pagesFonction Affine 2ait hssainPas encore d'évaluation
- Ex Livre Corriges Produit ScalaireDocument8 pagesEx Livre Corriges Produit Scalairejean dfdszxPas encore d'évaluation
- CI4 TD33-Centrifugeuse PDFDocument1 pageCI4 TD33-Centrifugeuse PDFOthmane TouilPas encore d'évaluation
- Le Produit Scalaire en Seconde SDocument31 pagesLe Produit Scalaire en Seconde SPapa Moussa N GueyePas encore d'évaluation
- Exo 8 Batteur A HouleDocument4 pagesExo 8 Batteur A HouleDABAKH LDEEBOYPas encore d'évaluation
- Géometrie de MassesDocument4 pagesGéometrie de MasseskajtiPas encore d'évaluation
- TD28 CorrectionDocument8 pagesTD28 CorrectionWasfi ZakariaPas encore d'évaluation
- Transformateurs Monophasés Correction Des Exercices III, IV Et VDocument7 pagesTransformateurs Monophasés Correction Des Exercices III, IV Et VBoutairPas encore d'évaluation
- MecaChap5 (Statique) ExoSupDocument36 pagesMecaChap5 (Statique) ExoSupYassine MyatPas encore d'évaluation
- Unknown PDFDocument5 pagesUnknown PDFAyman BenamerPas encore d'évaluation
- GM DS4-2015 CorrigeDocument5 pagesGM DS4-2015 Corrigeahmed TVPas encore d'évaluation
- Cours - Math - Trigonométrie Et Mesure de Grandeurs - 2ème Sciences (2020-2021) MR Ayadi Mondher PDFDocument4 pagesCours - Math - Trigonométrie Et Mesure de Grandeurs - 2ème Sciences (2020-2021) MR Ayadi Mondher PDFjomma selmiPas encore d'évaluation
- Apsim 18 DynamiqueDocument4 pagesApsim 18 DynamiqueKarima HamdanPas encore d'évaluation
- Schema Cinematique Pompe ManuelleDocument1 pageSchema Cinematique Pompe ManuelleAbdel ElouaerPas encore d'évaluation
- Élève L'amplificateur OperationnelDocument3 pagesÉlève L'amplificateur OperationnelFélix KouassiPas encore d'évaluation
- TDsDocument28 pagesTDsDécouvrir votre mondePas encore d'évaluation
- Si MP 2022Document16 pagesSi MP 2022NguyenPas encore d'évaluation
- Examen1 Optique Géométrique SMP2 SMC2 2021Document4 pagesExamen1 Optique Géométrique SMP2 SMC2 2021Bambe KodjarePas encore d'évaluation
- Cinématique GraphiqueDocument4 pagesCinématique GraphiqueDABAKH LDEEBOYPas encore d'évaluation
- Examen Statique Des Solides 2013Document7 pagesExamen Statique Des Solides 2013vinc giniPas encore d'évaluation
- Champ Magnetique Seerie - 114935Document2 pagesChamp Magnetique Seerie - 114935Amine AlaoUii AlaouiPas encore d'évaluation
- Cours Cinétique Et Dynamique CPI - 1 - CompressedDocument14 pagesCours Cinétique Et Dynamique CPI - 1 - CompressedHasna ZahirPas encore d'évaluation
- CNC 1987 MP PhysiqueDocument5 pagesCNC 1987 MP Physiqueanass grini100% (1)
- Devoir de Synthèse N°1 - Sciences Physiques - 3ème Math (2016-2017) MR TRIGUI LOTFIDocument4 pagesDevoir de Synthèse N°1 - Sciences Physiques - 3ème Math (2016-2017) MR TRIGUI LOTFIaliPas encore d'évaluation
- Equilibre D'un Solide Susceptible de Tourner Autour D'un Axe FixeDocument2 pagesEquilibre D'un Solide Susceptible de Tourner Autour D'un Axe FixeOmar ait taleb ali100% (1)
- Cours PC TRC Francais (WWW - Pc1.ma)Document50 pagesCours PC TRC Francais (WWW - Pc1.ma)Abdo IdrissiPas encore d'évaluation
- MinesSup2002 Specifique CorrigeDocument10 pagesMinesSup2002 Specifique CorrigeRed riotPas encore d'évaluation
- Série 3 2020-2021Document2 pagesSérie 3 2020-2021Siwar AbbesPas encore d'évaluation
- TC Maths Leçon 02 BarycentreDocument14 pagesTC Maths Leçon 02 Barycentreleandre konanPas encore d'évaluation
- Devoir de Synthèse N°2 - Math - Bac Sciences Exp (2011-2012) MR Maatallah - pdf1Document2 pagesDevoir de Synthèse N°2 - Math - Bac Sciences Exp (2011-2012) MR Maatallah - pdf1Mohamed SaidiPas encore d'évaluation
- Fonction AffineDocument3 pagesFonction AffineCamara laye100% (1)
- CN Fao IiDocument112 pagesCN Fao IiPouhe CyrillePas encore d'évaluation
- 4.Sc - Resume Fonction-Reciproque FNDocument1 page4.Sc - Resume Fonction-Reciproque FNHA Ppy0% (1)
- TD2 Cinematique Corrige PHY12ab 2014Document13 pagesTD2 Cinematique Corrige PHY12ab 2014MohamedBejjaPas encore d'évaluation
- Similitude Indirecte ExercicesDocument5 pagesSimilitude Indirecte ExercicesAliBenMessaoud50% (2)
- DS1 4Document12 pagesDS1 4badrwadi55Pas encore d'évaluation
- TD N°1 Cinématique Du Solide Dérivation TemporelleDocument3 pagesTD N°1 Cinématique Du Solide Dérivation TemporelleKiki RotoPas encore d'évaluation
- DS Meca 2Document13 pagesDS Meca 2MohamedBenKacemPas encore d'évaluation
- Chap 7 2017 2018Document9 pagesChap 7 2017 2018MohamedBenKacemPas encore d'évaluation
- TD TractionDocument6 pagesTD TractionMohamedBenKacemPas encore d'évaluation
- Serie 5Document6 pagesSerie 5MohamedBenKacemPas encore d'évaluation
- TRACTIONDocument8 pagesTRACTIONMohamedBenKacemPas encore d'évaluation
- Gmao 1Document18 pagesGmao 1MohamedBenKacemPas encore d'évaluation
- Chapitre 5Document8 pagesChapitre 5MohamedBenKacemPas encore d'évaluation
- Devoir de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2010-2011) MR Abdmouleh NabilDocument6 pagesDevoir de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2010-2011) MR Abdmouleh NabilMohamedBenKacemPas encore d'évaluation
- Devoir de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2013-2014) MR Barhoumi EzzedineDocument3 pagesDevoir de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2013-2014) MR Barhoumi EzzedineMohamedBenKacemPas encore d'évaluation
- Devoir de Controle 2Document3 pagesDevoir de Controle 2MohamedBenKacemPas encore d'évaluation
- SécuritéDocument30 pagesSécuritéMohamedBenKacemPas encore d'évaluation
- Devoir de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2013-2014) MR JELLALI ZAHREDDINEDocument4 pagesDevoir de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2013-2014) MR JELLALI ZAHREDDINEMohamedBenKacemPas encore d'évaluation
- Devoir Corrigé de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2014-2015) MR Sdiri AnisDocument9 pagesDevoir Corrigé de Contrôle N°2 - Sciences Physiques - Bac Sciences Exp (2014-2015) MR Sdiri AnisMohamedBenKacemPas encore d'évaluation
- CCMP Sciences-Industrielles 2010 PSIDocument30 pagesCCMP Sciences-Industrielles 2010 PSIMohamedBenKacemPas encore d'évaluation
- CH 3 MethodeDocument13 pagesCH 3 MethodeMohamedBenKacemPas encore d'évaluation
- Système AntipollutionDocument39 pagesSystème AntipollutionMohamedBenKacem50% (2)
- Chapitre 1Document6 pagesChapitre 1MohamedBenKacemPas encore d'évaluation
- Les EmbryagesDocument16 pagesLes EmbryagesMohamedBenKacem100% (1)
- MMC - Chapitre 4 - MansouriDocument61 pagesMMC - Chapitre 4 - MansouriBitti FaskPas encore d'évaluation
- 1-1 RemovedDocument15 pages1-1 RemovedYOU CEFPas encore d'évaluation
- Chap 4 - TABLIERDocument29 pagesChap 4 - TABLIERHhhPas encore d'évaluation
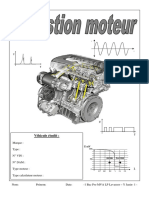
- Systeme Destion-Moteur JaninDocument14 pagesSysteme Destion-Moteur JaninIkeoPas encore d'évaluation
- Poste Automatique de Peinture de Paraboles1Document5 pagesPoste Automatique de Peinture de Paraboles1Badreddine KraiemPas encore d'évaluation
- 7401 g211 Correction EaDocument12 pages7401 g211 Correction Eamihai_1957Pas encore d'évaluation
- These BenallalDocument196 pagesThese BenallalMory NdiayePas encore d'évaluation
- Chapitre 2 PDFDocument48 pagesChapitre 2 PDFElias El HachemPas encore d'évaluation
- SSP443 - Fr-Le Moteur de 1.2 L Et 77 KW Avec TurbocompresseurDocument36 pagesSSP443 - Fr-Le Moteur de 1.2 L Et 77 KW Avec TurbocompresseurAuto repair diagnostic cars / trucksPas encore d'évaluation
- Audi A3 Sportback Notice Simplifiee Mode EmploiDocument16 pagesAudi A3 Sportback Notice Simplifiee Mode EmploiPhilippe FaurotPas encore d'évaluation
- Rapport de StageDocument12 pagesRapport de Stageoussamaouallal72Pas encore d'évaluation
- OrganigrammeDocument6 pagesOrganigrammemaisaraPas encore d'évaluation
- Asservessemenet de La Vitesse Lineaire 10 PDFDocument28 pagesAsservessemenet de La Vitesse Lineaire 10 PDFImmamHadramy100% (2)
- AG14170Document352 pagesAG14170serge.pungwePas encore d'évaluation
- Notion Sur Le Calcul Des RoulementsDocument15 pagesNotion Sur Le Calcul Des RoulementsDuavPas encore d'évaluation
- Cours EHTP 2011 2012 2ème Partie PDFDocument62 pagesCours EHTP 2011 2012 2ème Partie PDFobouhesyassinePas encore d'évaluation
- Applications Equations LocalesDocument13 pagesApplications Equations Localesmeriemmalika.aibPas encore d'évaluation
- Element de Machine I-1Document12 pagesElement de Machine I-1ulrich borel tchinda melongPas encore d'évaluation
- Renault Moteur Diesel Series MIDS MIVRDocument50 pagesRenault Moteur Diesel Series MIDS MIVRwoulkan67% (3)
- Chaudiere Vapeur VAP-LN Babcock WansonDocument2 pagesChaudiere Vapeur VAP-LN Babcock WansonzakariaPas encore d'évaluation
- Chapitre 1 - Conception MécaniqueDocument20 pagesChapitre 1 - Conception Mécaniqueسيف الدين يعقوبيPas encore d'évaluation
- Exercices Supplementaire CisaillementDocument3 pagesExercices Supplementaire Cisaillementmansour leye100% (4)
- TD N°1 Et 2 Ecoul Surface LibreDocument2 pagesTD N°1 Et 2 Ecoul Surface Librerabhim877Pas encore d'évaluation
- Projet de Béton Précontraint-1Document31 pagesProjet de Béton Précontraint-1Latif SemdePas encore d'évaluation
- Corr - DM Nc2b03 de La ThermochimieDocument2 pagesCorr - DM Nc2b03 de La ThermochimieLoïc MBELE KASTHANEPas encore d'évaluation
- Séminaire CompresseurDocument59 pagesSéminaire Compresseurballa bammounePas encore d'évaluation
- Essais MécaniqueDocument3 pagesEssais MécaniqueBoussalia LatifaPas encore d'évaluation
- La Géométrie Des Trains Roulants - Académie de Nancy-MetzDocument10 pagesLa Géométrie Des Trains Roulants - Académie de Nancy-MetzSAADBPas encore d'évaluation
- FORMATION Complete Ecrit PDFDocument166 pagesFORMATION Complete Ecrit PDFYves-Régis DINGAPas encore d'évaluation
- Corrigé TD - Element Machinebvfds - CFM3Document7 pagesCorrigé TD - Element Machinebvfds - CFM3Nada GhammemPas encore d'évaluation
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- Chevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesD'EverandChevaux de Fer - Locomotives Agricoles et Tracteurs LégendairesPas encore d'évaluation
- Saturne: Les Grands Articles d'UniversalisD'EverandSaturne: Les Grands Articles d'UniversalisPas encore d'évaluation
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013D'EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Pas encore d'évaluation