Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Dessin TechniqueDocument30 pagesDessin TechniqueOssama Mengade100% (11)
- Géographie MathématiqueDocument510 pagesGéographie MathématiquePancake76Pas encore d'évaluation
- TP Topographie Par HAMLAOUI SDocument56 pagesTP Topographie Par HAMLAOUI SSarkin Zed50% (2)
- Cours M.M.C. Chapitre IDocument8 pagesCours M.M.C. Chapitre IAbdoo SæmPas encore d'évaluation
- Oraux X-ENS Poly LLG MathsDocument13 pagesOraux X-ENS Poly LLG MathsBaptiste ARNAUDO100% (1)
- Roue de Maxwell Compte Rendu Du TP de MeDocument12 pagesRoue de Maxwell Compte Rendu Du TP de Meayoub zaroualPas encore d'évaluation
- TD6 - ÉnoncéDocument3 pagesTD6 - ÉnoncéSiGros MorellePas encore d'évaluation
- Ex4 LieDocument2 pagesEx4 LieSTEEVE LEVYPas encore d'évaluation
- Exo Geo DiffDocument16 pagesExo Geo DiffGEOFFROY AIHOUPas encore d'évaluation
- CCP2017 - MP1 Exercice 1Document3 pagesCCP2017 - MP1 Exercice 1لا إلٰه إلّا اللهPas encore d'évaluation
- Examen 2021 - ÉnoncéDocument2 pagesExamen 2021 - ÉnoncéSiGros MorellePas encore d'évaluation
- ds7b EVDocument24 pagesds7b EVothmane alaouiPas encore d'évaluation
- Ecg2 TD6Document6 pagesEcg2 TD6motivation31102001Pas encore d'évaluation
- Endomorphismes SymDocument6 pagesEndomorphismes SymDavid DupontPas encore d'évaluation
- AlgebreBilinL3Fiche32011 12Document3 pagesAlgebreBilinL3Fiche32011 12mohamed ismael toure mohamed ismaelPas encore d'évaluation
- E. Int Egrales Curvilignes Et de SurfaceDocument6 pagesE. Int Egrales Curvilignes Et de SurfaceMaxime GGaudetPas encore d'évaluation
- ECS2 TD6 CorrectionDocument17 pagesECS2 TD6 CorrectionMoustakimPas encore d'évaluation
- Ds 3 MpsiDocument2 pagesDs 3 MpsiYasser El hattabiPas encore d'évaluation
- Planches D'oraux: Oraux de Mines-PontsDocument6 pagesPlanches D'oraux: Oraux de Mines-PontsSamia Karroumi100% (1)
- ENS Ulm 2013Document5 pagesENS Ulm 2013Sohaib EL KARMIPas encore d'évaluation
- ds2022 Mp2iDocument3 pagesds2022 Mp2iarno.boulardPas encore d'évaluation
- TD 6Document2 pagesTD 6UsrPas encore d'évaluation
- Bachotage Diocésain 2021Document2 pagesBachotage Diocésain 2021Mauhutin Ambroise AMOUSSOUPas encore d'évaluation
- Public2017 B1Document6 pagesPublic2017 B1Mohamed JamaaPas encore d'évaluation
- PB50Document3 pagesPB50Ahmed TribakPas encore d'évaluation
- Roblème Endomorphisme de Différences Finies Polynômes Factoriels Et Polynômes de ErnoulliDocument5 pagesRoblème Endomorphisme de Différences Finies Polynômes Factoriels Et Polynômes de ErnoulliMBADJOUN DanielPas encore d'évaluation
- OMP2022 ET SujetbDocument2 pagesOMP2022 ET SujetbJeremDxPas encore d'évaluation
- TD Endoeveucl PDFDocument2 pagesTD Endoeveucl PDFAlgèbre PC - PTPas encore d'évaluation
- ENSAF1920 Feuille 7Document2 pagesENSAF1920 Feuille 7rachidPas encore d'évaluation
- Recueil Exo Electrom1 PDFDocument100 pagesRecueil Exo Electrom1 PDFJuan CadarniPas encore d'évaluation
- Oraux Maths MPDocument4 pagesOraux Maths MPMohamed MedPas encore d'évaluation
- Agreg 2008 Analyse ProbaDocument6 pagesAgreg 2008 Analyse Probamarc.lagier2Pas encore d'évaluation
- MinesPonts 2023 PC M1 EnonceDocument6 pagesMinesPonts 2023 PC M1 Enonceone piece to drawPas encore d'évaluation
- .On Pose Pour Tout X 0,, Alors:: ZZ 3x2y1 x4k1 Y6k1 KZDocument2 pages.On Pose Pour Tout X 0,, Alors:: ZZ 3x2y1 x4k1 Y6k1 KZmed tangourPas encore d'évaluation
- DS09 Espace Vectoriel IntegrationDocument8 pagesDS09 Espace Vectoriel IntegrationmednourPas encore d'évaluation
- 5 Exos PrehilbertiensDocument3 pages5 Exos PrehilbertiensArabic GangsterPas encore d'évaluation
- Décomposition de Dunford Et Reduction de JordanDocument22 pagesDécomposition de Dunford Et Reduction de JordanMouna DahbiPas encore d'évaluation
- CNC 2013 Math-2 TSI CorrectionDocument6 pagesCNC 2013 Math-2 TSI Correctionnaciridyae666Pas encore d'évaluation
- 148Document4 pages148Yacine TamOurtPas encore d'évaluation
- Licence 2 Top Et Calcul Diff TD - 1920Document4 pagesLicence 2 Top Et Calcul Diff TD - 1920Kouassi Francis KouamePas encore d'évaluation
- Kh2021-2022 6 Equiv-Normes SeriesfnsDocument2 pagesKh2021-2022 6 Equiv-Normes Seriesfnsyouness hidaPas encore d'évaluation
- Sujet de révision series de fourierDocument2 pagesSujet de révision series de fourierlesdaoudi5Pas encore d'évaluation
- BCE EDHEC Maths 2019 SujetDocument5 pagesBCE EDHEC Maths 2019 SujetBybzPas encore d'évaluation
- Centrale Supelec MP 2012 Maths 2 EpreuveDocument4 pagesCentrale Supelec MP 2012 Maths 2 EpreuveMiguel Clovis KamPas encore d'évaluation
- Agregint 2013 1 SujetDocument7 pagesAgregint 2013 1 SujetAnass TakfaPas encore d'évaluation
- exosRMScorriges 2015Document17 pagesexosRMScorriges 2015vincentPas encore d'évaluation
- VAR Cours 1 Et 2Document4 pagesVAR Cours 1 Et 2lostinvoid000Pas encore d'évaluation
- Sup Mpsi - Sup PcsiDocument21 pagesSup Mpsi - Sup PcsiYoussef BouchagraouiPas encore d'évaluation
- Mathematiques 1: SESSION 2017 MPMA102Document4 pagesMathematiques 1: SESSION 2017 MPMA102Mounir LahraichiPas encore d'évaluation
- Sec Mines 2006 Mathsspe PDFDocument4 pagesSec Mines 2006 Mathsspe PDFprepamontaPas encore d'évaluation
- Oral 2006Document57 pagesOral 2006marc.lagier2Pas encore d'évaluation
- Exos-2015-05-27Document4 pagesExos-2015-05-27s4bj6dwms8Pas encore d'évaluation
- TD5 LM270Document4 pagesTD5 LM270sechoirambulantPas encore d'évaluation
- DM14Document2 pagesDM14Patrick NgakouPas encore d'évaluation
- TD Champs de VecteursDocument2 pagesTD Champs de Vecteursayala stardice100% (2)
- DS11 SerieDocument8 pagesDS11 SeriemednourPas encore d'évaluation
- 04 MP CCP Math 58 PDFDocument11 pages04 MP CCP Math 58 PDFiqsdfqsdfqsdfqsdfPas encore d'évaluation
- TD Evn MP Topo 2022Document5 pagesTD Evn MP Topo 2022mehdi benmassoudPas encore d'évaluation
- Exos ClassiquesDocument6 pagesExos ClassiquesGeorges Keynes LorentzPas encore d'évaluation
- LC 1Document229 pagesLC 1Chakib BenmhamedPas encore d'évaluation
- Espaces Vectoriels PR Ehilbertiens R Eels Et Espaces Vectoriels EuclidiensDocument2 pagesEspaces Vectoriels PR Ehilbertiens R Eels Et Espaces Vectoriels EuclidiensSwayziiPas encore d'évaluation
- Banque Complete 2014Document28 pagesBanque Complete 2014FHPas encore d'évaluation
- Siw 3Document2 pagesSiw 3Maram RouechedPas encore d'évaluation
- TD2 SeriefourierDocument4 pagesTD2 SeriefourierPplus AkhiPas encore d'évaluation
- Poly MR MsilaDocument52 pagesPoly MR Msilameziane02Pas encore d'évaluation
- Sujet DEF Mali 2019 MathsDocument1 pageSujet DEF Mali 2019 Mathsabee zee100% (2)
- Tolerances GeometriqueDocument11 pagesTolerances Geometrique57641Pas encore d'évaluation
- 2as-Dc6 (5 Files Merged) PDFDocument9 pages2as-Dc6 (5 Files Merged) PDFAhmed benabdelkaderPas encore d'évaluation
- Cad-Way FraDocument180 pagesCad-Way FraKamel NaitPas encore d'évaluation
- Fonctions de Plusieurs VariablesDocument6 pagesFonctions de Plusieurs Variablesseawonders100% (1)
- Devoir de Contrôle N°3 - Math - Bac Mathématiques (2010-2011) MR Haouati ChokriDocument3 pagesDevoir de Contrôle N°3 - Math - Bac Mathématiques (2010-2011) MR Haouati ChokriM'kheitirat Ahmed100% (1)
- CNC 2005 PSI Maths 1 CorrigéDocument5 pagesCNC 2005 PSI Maths 1 CorrigéOutzeroualt ZakariaPas encore d'évaluation
- HCH MSI ch1Document8 pagesHCH MSI ch1Saloua Ben Latifa100% (2)
- Méca 2nd F4 - 1 - 2018 2019 - Chapitre I Leçon 2 Rappels Mathématiques Et Physiques - Trigonométrie PDFDocument5 pagesMéca 2nd F4 - 1 - 2018 2019 - Chapitre I Leçon 2 Rappels Mathématiques Et Physiques - Trigonométrie PDFbesandPas encore d'évaluation
- Rolin - Cours de Calcul DifferentielDocument18 pagesRolin - Cours de Calcul Differentieljprolin100% (1)
- Complexe 1 (2012)Document3 pagesComplexe 1 (2012)foufa2011Pas encore d'évaluation
- Géométrie Des Courbes - Courbes en Coordonnées CartésiennesDocument9 pagesGéométrie Des Courbes - Courbes en Coordonnées Cartésiennesimane kadiriPas encore d'évaluation
- ILEMATHS Maths P Dualite 01Document8 pagesILEMATHS Maths P Dualite 01Youness DriouichePas encore d'évaluation
- BacS Juin2009 Obligatoire CentresEtrangers Exo4 PDFDocument5 pagesBacS Juin2009 Obligatoire CentresEtrangers Exo4 PDFMourad MouradbensalemPas encore d'évaluation
- Pfe GC 0220 PDFDocument120 pagesPfe GC 0220 PDFMaher FlissPas encore d'évaluation
- Topologie Générale Pour La Topologie AlgebriqueDocument18 pagesTopologie Générale Pour La Topologie AlgebriqueCorey ButlerPas encore d'évaluation
- Calcul Vectoriel - TD1 CorrectionsDocument4 pagesCalcul Vectoriel - TD1 CorrectionsDriss Miral AchemlalPas encore d'évaluation
- Chap1 A3Document6 pagesChap1 A3Slimane ZadoudPas encore d'évaluation
- Exercices DPDocument6 pagesExercices DPDJIL BENPas encore d'évaluation
- 07 Exercices Surfacique PDFDocument66 pages07 Exercices Surfacique PDFJamal Farare67% (3)
- Gauss Contre Kant Sur La Géométrie Non-EuclidienneDocument14 pagesGauss Contre Kant Sur La Géométrie Non-EuclidiennercarturoPas encore d'évaluation
- cm2 Evaluation AnglesDocument2 pagescm2 Evaluation Anglesmamadou diaPas encore d'évaluation
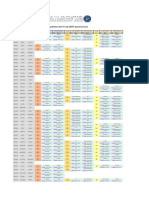
- Calendrier Prévisionel3 TP SMP3 CompressedDocument11 pagesCalendrier Prévisionel3 TP SMP3 CompressedTahar didouchPas encore d'évaluation
- TD DynamiqueDocument2 pagesTD Dynamiquemaliki sidibeyPas encore d'évaluation