Vous aimerez peut-être aussi
- AsservissementDocument61 pagesAsservissementAbdelkarim Ram100% (1)
- Résumé de Cours de Physique-Chimie - SM PC Et SVTDocument19 pagesRésumé de Cours de Physique-Chimie - SM PC Et SVTboufdili100% (3)
- Automatique LiniéaireDocument99 pagesAutomatique Liniéaireatoha007Pas encore d'évaluation
- TD Electrocinetique Serie1Document2 pagesTD Electrocinetique Serie1All AhmeDciaPas encore d'évaluation
- Cours AutomatiqueDocument82 pagesCours Automatiquesamson100% (1)
- Cours Master PDFDocument42 pagesCours Master PDFOD ELPas encore d'évaluation
- (Pouliethérapie Cours) CouleurDocument57 pages(Pouliethérapie Cours) CouleurYasmina Ais78% (18)
- Chapitre 2Document10 pagesChapitre 2Othmane NAZIHPas encore d'évaluation
- TD N°4 Commande Des Systèmes Linéaires Continus M1 CorrigéDocument18 pagesTD N°4 Commande Des Systèmes Linéaires Continus M1 CorrigéMouad ES SoubaaiPas encore d'évaluation
- TD N°1 Meca2 SMP3 17 18Document5 pagesTD N°1 Meca2 SMP3 17 18Aminos Ma50% (2)
- Recueil D'exercices D'analyses Des Systemes ContinusDocument10 pagesRecueil D'exercices D'analyses Des Systemes ContinusMichel Banze100% (1)
- TP 2Document13 pagesTP 2Mohammed ALMUSHIAA50% (2)
- Commande Par Découplage Non LinéaireDocument8 pagesCommande Par Découplage Non LinéaireDjalal Eddine Chemlal100% (1)
- INTRODUCTIONDocument4 pagesINTRODUCTIONBoutayna FassekhPas encore d'évaluation
- AutomatiqueDocument99 pagesAutomatiquebastaouiiPas encore d'évaluation
- AutomatiqueDocument94 pagesAutomatiqueeddabilihajar2002Pas encore d'évaluation
- Cours 12Document7 pagesCours 12mohamed nasrilarbiPas encore d'évaluation
- Bousrhal %ohammedDocument19 pagesBousrhal %ohammedMohammed BousrhalPas encore d'évaluation
- DTCDocument9 pagesDTCaer2007Pas encore d'évaluation
- Com Adapt 1Document6 pagesCom Adapt 1bobzooPas encore d'évaluation
- TP Ca 2Document13 pagesTP Ca 2Terkia AitPas encore d'évaluation
- Automatique Chapitre IiDocument19 pagesAutomatique Chapitre IiRuphin KabaselePas encore d'évaluation
- La Commande Sans Capteur MRASDocument9 pagesLa Commande Sans Capteur MRASMohamed SomaiPas encore d'évaluation
- Cours - Asservissement IUT UNDocument29 pagesCours - Asservissement IUT UNApollinaire Abega AbegaPas encore d'évaluation
- TP N°1: Etude Des Systèmes Dans L'espace D'état Sous Matlab Et SimulinkDocument11 pagesTP N°1: Etude Des Systèmes Dans L'espace D'état Sous Matlab Et Simulinkkuetecedric0Pas encore d'évaluation
- Travaux Pratique 1Document5 pagesTravaux Pratique 1SMAIL SM MSCMNPas encore d'évaluation
- 2 - T de Laplace 2018-19 PDFDocument49 pages2 - T de Laplace 2018-19 PDFHillo MessenPas encore d'évaluation
- Chapitre 5-Synthèse Des Systèmes AsservisDocument19 pagesChapitre 5-Synthèse Des Systèmes AsservisIbtissem DERRARPas encore d'évaluation
- 1 - Systemes Asservis Lineaires ContinusDocument18 pages1 - Systemes Asservis Lineaires Continusselma tiguiniPas encore d'évaluation
- Chapitre 4Document18 pagesChapitre 4Youssef Ben AliPas encore d'évaluation
- Chapitre 5-2023-2024Document5 pagesChapitre 5-2023-2024hammardjamel.0Pas encore d'évaluation
- CI24 Modelisation Experimentale Ordre 1 Et 2Document4 pagesCI24 Modelisation Experimentale Ordre 1 Et 2Abdelhadi AZPas encore d'évaluation
- MOSIM06 BDocument10 pagesMOSIM06 BOussamaDzPas encore d'évaluation
- Cours Cdes Avancees 30 10 2018Document32 pagesCours Cdes Avancees 30 10 2018Vrock Igami KusanagiPas encore d'évaluation
- Bekhouche Hassiba Lachgar Hakima: Commande Par Retour D'état Du Système DiscretDocument17 pagesBekhouche Hassiba Lachgar Hakima: Commande Par Retour D'état Du Système Discretkima lachgarPas encore d'évaluation
- Mode GlissantDocument6 pagesMode GlissantDîɖEn ElkêBîrPas encore d'évaluation
- AUT202 TDInfo1 CorrectionDocument25 pagesAUT202 TDInfo1 CorrectionBony KOMBOPas encore d'évaluation
- ChapFinal AsservissmentDocument9 pagesChapFinal AsservissmentChris ShulzPas encore d'évaluation
- TD N°1et 2 PDFDocument2 pagesTD N°1et 2 PDFYoucef MelianiPas encore d'évaluation
- Asservissement de Position Et de Vitesse D'une Articulation RobotiqueDocument23 pagesAsservissement de Position Et de Vitesse D'une Articulation RobotiqueHachemi Bhe100% (9)
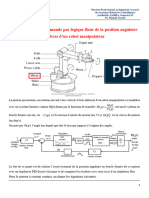
- Mini Projet Commande Par Logique FloueDocument2 pagesMini Projet Commande Par Logique FlouebessifimunaPas encore d'évaluation
- AUT202 TDInfo2Document8 pagesAUT202 TDInfo2Ammar AchouriPas encore d'évaluation
- Généralités Sur Les Systèmes AsservisDocument8 pagesGénéralités Sur Les Systèmes AsservisHamza HamzaPas encore d'évaluation
- Chapitre 1Document7 pagesChapitre 1Wissam BenganaPas encore d'évaluation
- GE - Master01-Génie Électrique-Automatique - Et.systèmes - Pr.ADDA - Belabbes.Commande - Optimale.cours01.S2Document4 pagesGE - Master01-Génie Électrique-Automatique - Et.systèmes - Pr.ADDA - Belabbes.Commande - Optimale.cours01.S2Rabah AmidiPas encore d'évaluation
- Asservessemenet de La Vitesse Lineaire 10 PDFDocument28 pagesAsservessemenet de La Vitesse Lineaire 10 PDFImmamHadramy100% (2)
- Chapitre 1Document17 pagesChapitre 1Ouss AmaPas encore d'évaluation
- Chapitre 2Document9 pagesChapitre 2eyaPas encore d'évaluation
- CHAP 3 Régulation IndustrielleDocument15 pagesCHAP 3 Régulation IndustrielleNidal BestPas encore d'évaluation
- TP02 ModélisationDocument21 pagesTP02 ModélisationAbde GhezbouryPas encore d'évaluation
- Etudes Des Systèmes DynamiquesDocument13 pagesEtudes Des Systèmes DynamiquesIlyess HamdiPas encore d'évaluation
- Cours AutomatiqueDocument17 pagesCours AutomatiqueMyrasamPas encore d'évaluation
- TP1 ObservateurDocument13 pagesTP1 ObservateurayatPas encore d'évaluation
- TD 02-01Document15 pagesTD 02-01Ben amor SabryPas encore d'évaluation
- CH 1 AsservissementDocument42 pagesCH 1 AsservissementSaad MahiPas encore d'évaluation
- Cours Asservissements PDFDocument235 pagesCours Asservissements PDFAaouine AbderrazzakPas encore d'évaluation
- Transformation linéaire directe: Applications et techniques pratiques en vision par ordinateurD'EverandTransformation linéaire directe: Applications et techniques pratiques en vision par ordinateurPas encore d'évaluation
- Ajustement du forfait: Optimisation des données visuelles pour une reconstruction préciseD'EverandAjustement du forfait: Optimisation des données visuelles pour une reconstruction précisePas encore d'évaluation
- Tenseur trifocal: Explorer la profondeur, le mouvement et la structure en vision par ordinateurD'EverandTenseur trifocal: Explorer la profondeur, le mouvement et la structure en vision par ordinateurPas encore d'évaluation
- Cprincipe DinertieDocument2 pagesCprincipe DinertieMidox MehdiPas encore d'évaluation
- Travaux Pratiques de BiophysiqueDocument32 pagesTravaux Pratiques de BiophysiqueAbde Tam100% (1)
- Exercices and Solution Echangeurs de ChaleurDocument9 pagesExercices and Solution Echangeurs de ChaleursmailPas encore d'évaluation
- IEC 60994-1991 ScanDocument142 pagesIEC 60994-1991 ScanAhmed Abd El WahabPas encore d'évaluation
- Les Pompes Volumétriques: 1. DéfinitionDocument7 pagesLes Pompes Volumétriques: 1. DéfinitionMohamed fahd abarjiPas encore d'évaluation
- Chapitre 5Document9 pagesChapitre 5Hebal Mohammed100% (1)
- Manipulation D2 Couple de Perte Dans Le Mouvement de Rotation D'Un VentilateurDocument5 pagesManipulation D2 Couple de Perte Dans Le Mouvement de Rotation D'Un VentilateurYves BulediPas encore d'évaluation
- Transfert de ChaleurDocument190 pagesTransfert de ChaleursaidPas encore d'évaluation
- 01 Méthode Statique EquivalenteDocument1 page01 Méthode Statique EquivalenteCivil AbdouPas encore d'évaluation
- TD RDM EtaContDéform DIC1 - 18 19Document2 pagesTD RDM EtaContDéform DIC1 - 18 19sidiPas encore d'évaluation
- Physique StatistiqueDocument97 pagesPhysique StatistiqueAtif Belaid100% (1)
- Notes Méca FluidesDocument72 pagesNotes Méca FluidesFaouzi EssaissiPas encore d'évaluation
- Cours Mecanique Des Fluides - 2014 - 1015Document78 pagesCours Mecanique Des Fluides - 2014 - 1015Zeta CoolPas encore d'évaluation
- Cours de Morphologie Des MachinesDocument43 pagesCours de Morphologie Des MachinesAnicet MulumbaPas encore d'évaluation
- Etude D'un Batiment R+8+S-sol PDFDocument226 pagesEtude D'un Batiment R+8+S-sol PDFben benPas encore d'évaluation
- Matière Et Rayonnement ExposéDocument25 pagesMatière Et Rayonnement ExposémenguyPas encore d'évaluation
- Poly 15Document24 pagesPoly 15TRAOREPas encore d'évaluation
- Representation Unilateral Et BilateraleDocument2 pagesRepresentation Unilateral Et BilateraledocteurgynecoPas encore d'évaluation
- Syllabus Cours D'analyse Des StructuresDocument3 pagesSyllabus Cours D'analyse Des StructuresJames DesulmaPas encore d'évaluation
- ECh9 Statique Des Fluides CoursDocument3 pagesECh9 Statique Des Fluides CoursegozeelowPas encore d'évaluation
- M Ecanique Des FluidesDocument207 pagesM Ecanique Des Fluidesfazfrito lacaviataPas encore d'évaluation
- CHAP 1 Changément de RéférentielDocument16 pagesCHAP 1 Changément de RéférentielHamala SidibePas encore d'évaluation
- Note de Calcul Des Dalots: 2. Normes Et MatériauxDocument3 pagesNote de Calcul Des Dalots: 2. Normes Et MatériauxArfaoui Aymen100% (1)
- Acoustique Chapitre 2Document264 pagesAcoustique Chapitre 2jawad EPas encore d'évaluation
- Rapport Plaques FinalDocument37 pagesRapport Plaques FinalKamalPas encore d'évaluation
- 121 2 Mini Concours Sup CorrigeDocument8 pages121 2 Mini Concours Sup CorrigeZaineb Abbad100% (1)