Vous aimerez peut-être aussi
- Introduction à la physique de la matièreD'EverandIntroduction à la physique de la matièreÉvaluation : 3 sur 5 étoiles3/5 (1)
- La Charpente BOISDocument53 pagesLa Charpente BOISAthanas KoninPas encore d'évaluation
- Dynamique: Les Grands Articles d'UniversalisD'EverandDynamique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Relativité générale: Les Grands Articles d'UniversalisD'EverandRelativité générale: Les Grands Articles d'UniversalisPas encore d'évaluation
- L'Usine Marémotrice de La RanceDocument45 pagesL'Usine Marémotrice de La RanceSalem ARIFPas encore d'évaluation
- Cours RDM Version DéfénitiveDocument73 pagesCours RDM Version DéfénitiveAbderrazak Nassiri100% (1)
- Eau Chaude Sanitaire PDFDocument8 pagesEau Chaude Sanitaire PDFcp1r3s0% (1)
- Cours Mecanique Des Sols MDSDocument90 pagesCours Mecanique Des Sols MDSkhaireddine100% (1)
- Diapo RDMDocument75 pagesDiapo RDMBOULAY100% (1)
- Dimensionnement Structure en Treillis PDFDocument77 pagesDimensionnement Structure en Treillis PDFlekouf43100% (2)
- Statique AppliqueeDocument31 pagesStatique AppliqueeSaid Mrf100% (1)
- Support de Cours Sciences Des MateriauxDocument131 pagesSupport de Cours Sciences Des MateriauxChouaib Aribi100% (1)
- Cours RDM Chapitre I StatiqueDocument8 pagesCours RDM Chapitre I StatiqueDriss SajPas encore d'évaluation
- Cours Sur Le Disque DurDocument11 pagesCours Sur Le Disque DurHabib FayePas encore d'évaluation
- IsostatismeDocument36 pagesIsostatismedidinedPas encore d'évaluation
- RDM - Cours 1Document40 pagesRDM - Cours 1Hervé BanouwinPas encore d'évaluation
- Cours RDMDocument81 pagesCours RDMh.serroukhPas encore d'évaluation
- Resistance Des MateriauxDocument80 pagesResistance Des MateriauxChristian DinhoPas encore d'évaluation
- RDM Cours Exercices - InpfDocument80 pagesRDM Cours Exercices - InpflincenavelasoaPas encore d'évaluation
- Resistance Des Materiaux L1 Archi - 220506 - 143520Document37 pagesResistance Des Materiaux L1 Archi - 220506 - 143520Ibrahim Marcel KonatePas encore d'évaluation
- COURS DE RESISTANCE DES MATERIAUX Niveau 1 - 04 - 05 - 2017Document49 pagesCOURS DE RESISTANCE DES MATERIAUX Niveau 1 - 04 - 05 - 2017Donatien FodjoPas encore d'évaluation
- Hypotheses RDMDocument41 pagesHypotheses RDMsaadomar80Pas encore d'évaluation
- Support de Cours Sciences Des MateriauxDocument107 pagesSupport de Cours Sciences Des Materiauxfathallah karimPas encore d'évaluation
- COURS DE RESISTANCE 1 Et 2 DES MATERIAUX Niveau 1 - 13 11 2018Document54 pagesCOURS DE RESISTANCE 1 Et 2 DES MATERIAUX Niveau 1 - 13 11 2018joseph GontoPas encore d'évaluation
- RDM Science 1Document13 pagesRDM Science 1Abdelkarim LasriPas encore d'évaluation
- 1 Mca TSTPDocument6 pages1 Mca TSTPamoula87Pas encore d'évaluation
- 1a9 Mca TSTPDocument87 pages1a9 Mca TSTPMIKAEL HENRIOTPas encore d'évaluation
- Livre-RDM - ExtraDocument125 pagesLivre-RDM - ExtralimmoudPas encore d'évaluation
- Chapitre 1 Introduction A La Resistance Des Materiaux PDFDocument4 pagesChapitre 1 Introduction A La Resistance Des Materiaux PDFMaha KarrayPas encore d'évaluation
- Cours Dimensionnement StructuresDocument77 pagesCours Dimensionnement StructuresChames Bel HajPas encore d'évaluation
- 2017 Juin Rattrapage Mec MatDocument2 pages2017 Juin Rattrapage Mec MatAmeniYaichPas encore d'évaluation
- RDM - C PDFDocument143 pagesRDM - C PDFHassan KertitPas encore d'évaluation
- Last UpdateDocument24 pagesLast Updatemarkelenor56Pas encore d'évaluation
- Modelisation AMDocument9 pagesModelisation AMKacou FatimPas encore d'évaluation
- Chapitre 1Document5 pagesChapitre 1mohammedbahedixPas encore d'évaluation
- IntroductionDocument7 pagesIntroductionyacinePas encore d'évaluation
- Traveaux Pratiques RDMDocument48 pagesTraveaux Pratiques RDMMehdi BlinkPas encore d'évaluation
- RDM1Document17 pagesRDM1kamlofrank42Pas encore d'évaluation
- Les Tenseurs en Mécanique Et en Élasticité Télécharger, Lire PDFDocument5 pagesLes Tenseurs en Mécanique Et en Élasticité Télécharger, Lire PDFRuphin NguelePas encore d'évaluation
- Tous Les Trans Parents Du Cours 07Document427 pagesTous Les Trans Parents Du Cours 07lieumanga2974Pas encore d'évaluation
- Fiche Pedagogique Du Module Tec 007Document2 pagesFiche Pedagogique Du Module Tec 007Youcef SIPas encore d'évaluation
- 2EMRDMcoursEN2022 Cours 1 Et 2Document127 pages2EMRDMcoursEN2022 Cours 1 Et 2JakePas encore d'évaluation
- RDM - Chapitre 1 - LP GCDocument21 pagesRDM - Chapitre 1 - LP GCwissalPas encore d'évaluation
- DDS-S3-revisions-1A-GMP-Bordeaux RDMDocument27 pagesDDS-S3-revisions-1A-GMP-Bordeaux RDMCire BestPas encore d'évaluation
- TP PhiDocument796 pagesTP PhiMehdi BnmssdPas encore d'évaluation
- GEN2813 - V2 - Modèle de Rédaction Des Rapports (3) - 1Document21 pagesGEN2813 - V2 - Modèle de Rédaction Des Rapports (3) - 1markelenor56Pas encore d'évaluation
- MecaniqueDocument20 pagesMecaniquehamzaPas encore d'évaluation
- COURS de RDM - 1Document116 pagesCOURS de RDM - 1guerschom kapelaPas encore d'évaluation
- Aérodynamique Cours 2019Document66 pagesAérodynamique Cours 2019Elvis HonvoPas encore d'évaluation
- Notions de RDMDocument71 pagesNotions de RDMbouchaib12345Pas encore d'évaluation
- VVVVVVDocument4 pagesVVVVVVKARIMPas encore d'évaluation
- Cours de Mecanique Resistance Des MateriauxDocument46 pagesCours de Mecanique Resistance Des MateriauxDavid parolePas encore d'évaluation
- MMC - Chapitre III - Etude Des ContraintesDocument16 pagesMMC - Chapitre III - Etude Des Contrainteselyas.riahPas encore d'évaluation
- PROG+chap1 Master1 2014Document22 pagesPROG+chap1 Master1 2014Hawa TembelyPas encore d'évaluation
- Relativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiqueD'EverandRelativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiquePas encore d'évaluation
- L'artichaut de Madagascar Aux PommuiesDocument7 pagesL'artichaut de Madagascar Aux Pommuiesfrederic bertrandPas encore d'évaluation
- Beton Arme Cours Complet Chap9 PDFDocument47 pagesBeton Arme Cours Complet Chap9 PDFTOVIHO SessinouPas encore d'évaluation
- Renoform TD 2010Document2 pagesRenoform TD 2010angel de mi guardaPas encore d'évaluation
- 760 PontsDocument74 pages760 PontsSarrauste JulienPas encore d'évaluation
- Analyse Fonctionnel PROJETDocument8 pagesAnalyse Fonctionnel PROJETMajda BelkhaouiPas encore d'évaluation
- Plafond Filtrant: Dimensions GénériquesDocument1 pagePlafond Filtrant: Dimensions GénériquesDjamal MohammediPas encore d'évaluation
- Le Triac en Commutation - Commande Des Relais Statiques - Princ Ipe ÉlectroniqueDocument13 pagesLe Triac en Commutation - Commande Des Relais Statiques - Princ Ipe ÉlectroniqueJiress MuswilPas encore d'évaluation
- IND2201 PresentationDocument2 pagesIND2201 PresentationCharles-André GuénettePas encore d'évaluation
- Examen Mecanique Du SolDocument2 pagesExamen Mecanique Du SolgoboPas encore d'évaluation
- TS Phy Chap6 PDFDocument11 pagesTS Phy Chap6 PDFnizar hadhriPas encore d'évaluation
- TC Qqla 27464Document174 pagesTC Qqla 27464Sabri Naima GhoutiaPas encore d'évaluation
- XMLRPCDocument4 pagesXMLRPCElhadji Malick GayePas encore d'évaluation
- Commande FacturationDocument10 pagesCommande FacturationXavier Le Roy100% (1)
- TDN°4 FiltrageDocument2 pagesTDN°4 FiltrageIsmail Lasri100% (1)
- CIABO ASP Presentation Des Travaux SDM01!02!07!08!09 Odpe Ageroute + AnnexesDocument94 pagesCIABO ASP Presentation Des Travaux SDM01!02!07!08!09 Odpe Ageroute + AnnexesbossPas encore d'évaluation
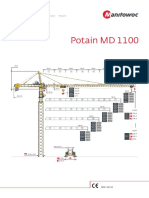
- R3t1fnhswjbl9uxvpotain MD 1100 Tower Crane NetworkDocument8 pagesR3t1fnhswjbl9uxvpotain MD 1100 Tower Crane Networkubeydullah coşkunPas encore d'évaluation
- Tutoriel Etablissements Origine Adele FRDocument7 pagesTutoriel Etablissements Origine Adele FRPamela TitoPas encore d'évaluation
- STR00 - FONDATIONS - RESEAUX SOUS-DALLE-Layout1Document1 pageSTR00 - FONDATIONS - RESEAUX SOUS-DALLE-Layout1dimitri tchabouPas encore d'évaluation
- Note de Calcul PoutreDocument6 pagesNote de Calcul PoutreAno Nymous ProPas encore d'évaluation
- DS de Thermodynamique Avec QCM Du 19 Janvier 2013 + CorrigéDocument10 pagesDS de Thermodynamique Avec QCM Du 19 Janvier 2013 + CorrigéRodrigue patrice Njounhassi koagnePas encore d'évaluation
- Circuit HydrauliqDocument90 pagesCircuit Hydrauliqsafwen ranenPas encore d'évaluation
- Emd2 Info4 2014Document2 pagesEmd2 Info4 2014Amar AlichePas encore d'évaluation
- PcastucesDocument108 pagesPcastucesmohamed rifkiPas encore d'évaluation
- As 70671 LR-Z SG 470FR FR 1056-2Document2 pagesAs 70671 LR-Z SG 470FR FR 1056-2a.ghani BaRaCuDaPas encore d'évaluation
- Cours C++Document501 pagesCours C++Sara AbPas encore d'évaluation
- Cours Simplifie La Liaison CompleteDocument3 pagesCours Simplifie La Liaison CompleteMohammed DahbiPas encore d'évaluation