Vous aimerez peut-être aussi
- Integration NumeriqueDocument13 pagesIntegration Numeriquehazem dawahi100% (1)
- Energie EolienneDocument51 pagesEnergie Eoliennedalila AMMARPas encore d'évaluation
- Bibliographie Stress Au Travail 2017-10-27Document15 pagesBibliographie Stress Au Travail 2017-10-27mael bikoroPas encore d'évaluation
- Etude Des Mecanismes de Levage Et de Direction D'Un Pont RoulantDocument59 pagesEtude Des Mecanismes de Levage Et de Direction D'Un Pont Roulantamzal boudjmaamoundherPas encore d'évaluation
- SwingDocument33 pagesSwingKarim KarimPas encore d'évaluation
- TD Systèmes Asservis 1Document1 pageTD Systèmes Asservis 1Aissa KalachePas encore d'évaluation
- Résumé Chapitre2 Systèmes Linéaires MultivariablesDocument9 pagesRésumé Chapitre2 Systèmes Linéaires Multivariablesikram mammarPas encore d'évaluation
- Chapitre5 Master SANDocument8 pagesChapitre5 Master SANOussama BaddaouiPas encore d'évaluation
- Chapitre 2Document7 pagesChapitre 2Hafa ApbPas encore d'évaluation
- Transformée en ZDocument11 pagesTransformée en Zchahrazed youtubePas encore d'évaluation
- Chap-2 Cours3Document6 pagesChap-2 Cours3Louis PouchepadassPas encore d'évaluation
- Tp2 Sabir TalbyDocument17 pagesTp2 Sabir TalbyKamal KamalPas encore d'évaluation
- AsservissementDocument8 pagesAsservissementCheick KouatéPas encore d'évaluation
- Outils Mathématiques Pour La PhysiqueDocument3 pagesOutils Mathématiques Pour La Physiquevnguema8Pas encore d'évaluation
- Espace Etat 1ère Version PDFDocument56 pagesEspace Etat 1ère Version PDFJourdan MbappePas encore d'évaluation
- Chapitre 01Document10 pagesChapitre 01algPas encore d'évaluation
- Support Filtres Numériques 2024Document34 pagesSupport Filtres Numériques 2024mehdibenkalia5Pas encore d'évaluation
- TS Cours Chapitre 5Document4 pagesTS Cours Chapitre 5Azze DdinePas encore d'évaluation
- Rapport de Mini ProjetDocument9 pagesRapport de Mini ProjetAymen BenguessoumPas encore d'évaluation
- Chapitre3 Systèmes AsservisDocument10 pagesChapitre3 Systèmes AsservisEmmanuel Kawalina KatalikoPas encore d'évaluation
- 2 Modèle FrequentielDocument19 pages2 Modèle FrequentielLaurenne YaoPas encore d'évaluation
- Chapitre 3-Representation D'état-2023-2024Document15 pagesChapitre 3-Representation D'état-2023-2024hammardjamel.0Pas encore d'évaluation
- Transformée de Laplace ELN 3Document13 pagesTransformée de Laplace ELN 3DocPas encore d'évaluation
- TP2 AssefDocument24 pagesTP2 AssefHitch YanPas encore d'évaluation
- Fiche9 TZDocument2 pagesFiche9 TZmuzzolonPas encore d'évaluation
- TPMCC Auriol Idriss ElliottDocument13 pagesTPMCC Auriol Idriss Elliottoteme Mbella King DuclairPas encore d'évaluation
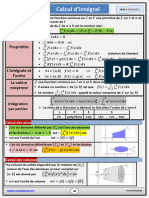
- Calcul IntegralDocument1 pageCalcul IntegralAbdelKarim dergoulPas encore d'évaluation
- Chapitre 3Document6 pagesChapitre 3Boù ChràPas encore d'évaluation
- Chapitre 3 Commandabilitéet Observabilitédes Systèmes LinéairesDocument5 pagesChapitre 3 Commandabilitéet Observabilitédes Systèmes LinéairesSalim BouaziziPas encore d'évaluation
- Exemples Transformée en ZDocument9 pagesExemples Transformée en ZamaniPas encore d'évaluation
- PFE SMA 21-22 PDF - 230214 - 233701Document20 pagesPFE SMA 21-22 PDF - 230214 - 233701Abdel Ali KhafifPas encore d'évaluation
- Fiche5 Reponse FrequentielleDocument5 pagesFiche5 Reponse FrequentiellemuzzolonPas encore d'évaluation
- 5 Réponse TemporelleDocument21 pages5 Réponse TemporelleSamy AmieziPas encore d'évaluation
- CM - 1 Automatique Linéaire MGC1063MDocument24 pagesCM - 1 Automatique Linéaire MGC1063Mtom bouteillePas encore d'évaluation
- Cours - Cdes - Avancees - M2ELM - 18 - 01 - 2021 - Chapitre 2Document23 pagesCours - Cdes - Avancees - M2ELM - 18 - 01 - 2021 - Chapitre 2Seif HimoudPas encore d'évaluation
- La Marche Aléatoire TIPE T PDFDocument5 pagesLa Marche Aléatoire TIPE T PDFYoussef El FahimePas encore d'évaluation
- Projet AsservissementDocument15 pagesProjet Asservissementagboyibo jeremiePas encore d'évaluation
- Solution-Examen1 Mécanique Des Fluides ApprofondieDocument2 pagesSolution-Examen1 Mécanique Des Fluides ApprofondieBrice GamintePas encore d'évaluation
- Systeme Dynamique Premier OrdreDocument5 pagesSysteme Dynamique Premier OrdreaissaPas encore d'évaluation
- Hafsa Chap2Document7 pagesHafsa Chap2Garouachi AziizaPas encore d'évaluation
- SERIEN°3MFDocument13 pagesSERIEN°3MFrachida lakaazPas encore d'évaluation
- Analyse Des Systèmes Dans L'espace D'état - Année Académique 2023-2024Document17 pagesAnalyse Des Systèmes Dans L'espace D'état - Année Académique 2023-2024hammardjamel.0Pas encore d'évaluation
- Chapitre I Représentation Des Systèmes Linéaires Temps Invariant (LTI)Document11 pagesChapitre I Représentation Des Systèmes Linéaires Temps Invariant (LTI)Bensaada AminePas encore d'évaluation
- Chapitre 1 RegDocument12 pagesChapitre 1 Regcheikh tidiane diopPas encore d'évaluation
- Solution Examen 2023Document6 pagesSolution Examen 2023idir baloulPas encore d'évaluation
- CH 1 (Introduction)Document9 pagesCH 1 (Introduction)Badis HamekPas encore d'évaluation
- TD1 - Représentation D'étatDocument4 pagesTD1 - Représentation D'étatssafouen4Pas encore d'évaluation
- Cours Acada AutomatiqueDocument55 pagesCours Acada AutomatiqueMoez YoussefPas encore d'évaluation
- Cour Complet Oscillations Forcées 1DDLDocument5 pagesCour Complet Oscillations Forcées 1DDLAnya Hernafi100% (1)
- TS Chapitre - 4Document7 pagesTS Chapitre - 4Amir KenzyPas encore d'évaluation
- Circuits Électriques en Régime Sinusoidale220565Document6 pagesCircuits Électriques en Régime Sinusoidale220565mokchaha.ahmedPas encore d'évaluation
- Chapitre 2: Transformée en Z (USTHB)Document5 pagesChapitre 2: Transformée en Z (USTHB)MohammedPas encore d'évaluation
- Chapitre V Etude Des Systemes LineairesDocument15 pagesChapitre V Etude Des Systemes LineairesBlack Power KingPas encore d'évaluation
- Corrigé Examen de Remplacement PST (L3) 22 Féveier 2022Document3 pagesCorrigé Examen de Remplacement PST (L3) 22 Féveier 2022mayar mimiPas encore d'évaluation
- TP Salc 1Document17 pagesTP Salc 1motmaniPas encore d'évaluation
- Cours Automatique Des SystèmesDocument6 pagesCours Automatique Des SystèmesIkram El JamaiPas encore d'évaluation
- Chapitre2 Systèmes AsservisDocument14 pagesChapitre2 Systèmes AsservisEmmanuel Kawalina KatalikoPas encore d'évaluation
- Cours 01 TFSD TFD Et TZ 2021-2022Document17 pagesCours 01 TFSD TFD Et TZ 2021-2022Houda SenoussiPas encore d'évaluation
- Tpstabilitéangufinal 1Document14 pagesTpstabilitéangufinal 1الشاكر لله100% (1)
- Analyse Symbolique Des SLCIDocument3 pagesAnalyse Symbolique Des SLCISalma MnasriPas encore d'évaluation
- Support TS - CH3 - L2etL3 ESATIC 2019 PDFDocument57 pagesSupport TS - CH3 - L2etL3 ESATIC 2019 PDFFourier Cédric DanPas encore d'évaluation
- Epreuve E41 Bts Elec 2019 SujetDocument21 pagesEpreuve E41 Bts Elec 2019 Sujetoussama houariPas encore d'évaluation
- Antennes - Techniques PDFDocument47 pagesAntennes - Techniques PDFMANERERPas encore d'évaluation
- ReclamationDocument1 pageReclamationBoukidi AminePas encore d'évaluation
- Gestion Budgétaire: Contrôle BudgetaireDocument25 pagesGestion Budgétaire: Contrôle BudgetaireKhansaa HaroudPas encore d'évaluation
- T 7h2uw 2022 1Document1 pageT 7h2uw 2022 1MamPas encore d'évaluation
- Theme 2 Le Vivant Sa Diversite Et Les Fonctions Qui Le Caracterisent ProgrammeDocument5 pagesTheme 2 Le Vivant Sa Diversite Et Les Fonctions Qui Le Caracterisent ProgrammeAmine AminePas encore d'évaluation
- Le Labfab de Rennes 2012-2013: DiaporamaDocument14 pagesLe Labfab de Rennes 2012-2013: DiaporamalabfabfrPas encore d'évaluation
- 1990 - Jeammaud A. - La Règle de Droit Comme Modèle PDFDocument18 pages1990 - Jeammaud A. - La Règle de Droit Comme Modèle PDFGuyMoquette100% (1)
- DT2022-18 Document Travail Grille de DensiteDocument26 pagesDT2022-18 Document Travail Grille de Densitefrederic amadonPas encore d'évaluation
- Symfony2 Un Tutoriel Pour Debuter Avec Le Framework Symfony2Document200 pagesSymfony2 Un Tutoriel Pour Debuter Avec Le Framework Symfony2Bryan Fury JimmyPas encore d'évaluation
- Echafaudages en Sécurité Montage Et Démontage: Suva, Secteur Génie Civil Et BâtimentDocument47 pagesEchafaudages en Sécurité Montage Et Démontage: Suva, Secteur Génie Civil Et BâtimentZirig ChafikPas encore d'évaluation
- 3sc ds1Document44 pages3sc ds1wala.ayhemPas encore d'évaluation
- Samuel Blaser, Marc Ducret - JazzdorDocument2 pagesSamuel Blaser, Marc Ducret - JazzdorolocesPas encore d'évaluation
- Personal SkillsDocument11 pagesPersonal SkillsAgathe GrenonPas encore d'évaluation
- Processeur M MoireDocument66 pagesProcesseur M Moiresayedyoussef390Pas encore d'évaluation
- Achar2Bases de Calcul de lEC3Document19 pagesAchar2Bases de Calcul de lEC3Omar OmarPas encore d'évaluation
- Physique-du-globe-et-meteorologie-Alphonse Berget-1904 PDFDocument379 pagesPhysique-du-globe-et-meteorologie-Alphonse Berget-1904 PDFAnonymous 4MLEo9TVQPas encore d'évaluation
- RespirationDocument19 pagesRespirationarselbleez441Pas encore d'évaluation
- Rapport de Stage Complete Sur La Gestion Des Opérations de CréditDocument44 pagesRapport de Stage Complete Sur La Gestion Des Opérations de Créditrogerkom.profsPas encore d'évaluation
- التمدد الحضري و الحراك التنقلي في النطاق الحضري لمدينة سطيفDocument11 pagesالتمدد الحضري و الحراك التنقلي في النطاق الحضري لمدينة سطيفhoulahilaPas encore d'évaluation
- Cahier Des Charges Installation PV SBC 2022Document20 pagesCahier Des Charges Installation PV SBC 2022youssefPas encore d'évaluation
- Achat Et AaproDocument33 pagesAchat Et AaproOualid BelbrikPas encore d'évaluation
- Achouri Amira NouhaDocument135 pagesAchouri Amira NouhaEmmanuel AvegnonPas encore d'évaluation
- Rouleaux PACK - VRACDocument54 pagesRouleaux PACK - VRACZaarad ZakariaPas encore d'évaluation
- EB2-Epreuve1 Production de L'ecritDocument2 pagesEB2-Epreuve1 Production de L'ecritElissa Naalaband100% (1)
- La Mise en Forme PFE-1Document3 pagesLa Mise en Forme PFE-1pfePas encore d'évaluation