Vous aimerez peut-être aussi
- 01 Espaces HilbertDocument6 pages01 Espaces HilbertAnas FahmiPas encore d'évaluation
- Is - Corrigé de L - Étude de Cas Ayda (Version 2016)Document5 pagesIs - Corrigé de L - Étude de Cas Ayda (Version 2016)Hicham DaouchPas encore d'évaluation
- Controle 1 CorrigeDocument8 pagesControle 1 Corrigegreat manPas encore d'évaluation
- DIAS (Etude Locale)Document7 pagesDIAS (Etude Locale)aminehadri3725Pas encore d'évaluation
- Chap 3Document19 pagesChap 3Kouamé Illan KonanPas encore d'évaluation
- Examen1 Topologie SMA5 FSRDocument2 pagesExamen1 Topologie SMA5 FSRHassan oumahrirPas encore d'évaluation
- DM 2324Document4 pagesDM 2324zain zagoraPas encore d'évaluation
- A54AFAEC3730F35BDocument3 pagesA54AFAEC3730F35BDonald YaoPas encore d'évaluation
- I Compl Etude: I.1 Assimilation Du CoursDocument7 pagesI Compl Etude: I.1 Assimilation Du Coursepsilon314Pas encore d'évaluation
- Serie3 11Document2 pagesSerie3 11Felix AFEKUPas encore d'évaluation
- TD2 CteDocument6 pagesTD2 CteNwantou TchouameniPas encore d'évaluation
- 2014 Mines MP Maths2Document6 pages2014 Mines MP Maths2MI DOPas encore d'évaluation
- TD 9Document11 pagesTD 9georges.mendes000Pas encore d'évaluation
- Algebre1 TD10 CorrigeDocument12 pagesAlgebre1 TD10 CorrigeNadaPas encore d'évaluation
- Fic 00038Document11 pagesFic 00038qbdelhqdiPas encore d'évaluation
- Selcor 05Document14 pagesSelcor 05Cheujeu chaldouPas encore d'évaluation
- TD Analyse Fonctionnelle 2023 2024Document2 pagesTD Analyse Fonctionnelle 2023 2024Roger SawadogoPas encore d'évaluation
- m2g PrerequisDocument12 pagesm2g PrerequisZogoPas encore d'évaluation
- Chapitre1 CalcdiffDocument9 pagesChapitre1 Calcdiffmaths lifePas encore d'évaluation
- Exam Calcul Diff2Document13 pagesExam Calcul Diff2Nabil MessaoudiPas encore d'évaluation
- Cours - TopologieDocument28 pagesCours - TopologieMartin GarnierPas encore d'évaluation
- Cours311 1Document7 pagesCours311 1Ahmed Khalil LekouchPas encore d'évaluation
- Espaces Normés Et Algèbres de Banach (Alain Prouté) (Z-Library)Document11 pagesEspaces Normés Et Algèbres de Banach (Alain Prouté) (Z-Library)lakbiramaftah121Pas encore d'évaluation
- Série D'exercices Corrigés 3 Calcul DifférentielDocument13 pagesSérie D'exercices Corrigés 3 Calcul DifférentielAkpo ArmandPas encore d'évaluation
- ExosDocument7 pagesExosRabab RababPas encore d'évaluation
- I Espaces M Etriques: I.1 Assimilation Du CoursDocument6 pagesI Espaces M Etriques: I.1 Assimilation Du Coursepsilon314Pas encore d'évaluation
- Corrige Examen 2008Document4 pagesCorrige Examen 2008Tout Pour EllePas encore d'évaluation
- ANAH5Document13 pagesANAH5DhdhPas encore d'évaluation
- Td4 - Topologie Fonctions-LineairesDocument2 pagesTd4 - Topologie Fonctions-LineairesibouPas encore d'évaluation
- Bousquet P. Cours de Géométrie Affine Et Euclidienne Pour L'agrégationDocument82 pagesBousquet P. Cours de Géométrie Affine Et Euclidienne Pour L'agrégationMario PuppiPas encore d'évaluation
- TD AfaDocument19 pagesTD AfaRoger SawadogoPas encore d'évaluation
- Norme SujetDocument6 pagesNorme SujetSafaa NadirPas encore d'évaluation
- Topologie Et Calcul Diff - Poly - Partie 2Document25 pagesTopologie Et Calcul Diff - Poly - Partie 2jeanPas encore d'évaluation
- Notes CoursTD SD Chap2-3Document34 pagesNotes CoursTD SD Chap2-3Nadia SahraouiPas encore d'évaluation
- MAT431 DM2 CorrectionDocument5 pagesMAT431 DM2 CorrectionÉmir NairiPas encore d'évaluation
- Evn 1Document75 pagesEvn 1Walid El Bahar100% (1)
- Topologie Et MesureDocument6 pagesTopologie Et MesureDARSAOUIPas encore d'évaluation
- Corrigé1Document6 pagesCorrigé1rokiahoumedsalehPas encore d'évaluation
- FichesMA102 1Document6 pagesFichesMA102 1v9vw7zrrmqPas encore d'évaluation
- MP MATHS MINES 2 2014.enonceDocument6 pagesMP MATHS MINES 2 2014.enonceIbtissam frPas encore d'évaluation
- Chapt2 PDFDocument19 pagesChapt2 PDFZozo Zozo DiagnePas encore d'évaluation
- Resume Sup Spe Analyse FicheDocument12 pagesResume Sup Spe Analyse FicheIssa SangarePas encore d'évaluation
- TD AnaFonc 23-24Document6 pagesTD AnaFonc 23-24Lemankreo GaliPas encore d'évaluation
- Espace Métrique ProduitDocument3 pagesEspace Métrique ProduitYannick DsprbsPas encore d'évaluation
- ANAH7Document12 pagesANAH7Mahdi BhrPas encore d'évaluation
- Equations DifferentiellesDocument71 pagesEquations DifferentiellesJonayé DossouPas encore d'évaluation
- Calcul DiffDocument8 pagesCalcul DiffOmar ElmaghatPas encore d'évaluation
- Exercice Metrologie - Analyse DimensionnelleDocument8 pagesExercice Metrologie - Analyse DimensionnellekikaPas encore d'évaluation
- 206 - Théorèmes de Point Xe. Exemples Et Applications: 1 Mise en BoucheDocument4 pages206 - Théorèmes de Point Xe. Exemples Et Applications: 1 Mise en Boucheadsenskiki303Pas encore d'évaluation
- DR Timack NGOM: Cours Analyse FonctionnelleDocument19 pagesDR Timack NGOM: Cours Analyse FonctionnelleZozo Zozo DiagnePas encore d'évaluation
- 2023 Exercices Topologie IDocument4 pages2023 Exercices Topologie IMohamed SangarePas encore d'évaluation
- 5.3 Espaces Vectoriels Norm Es de Dimensions Finies: 5.3.1 Equivalence Des NormesDocument7 pages5.3 Espaces Vectoriels Norm Es de Dimensions Finies: 5.3.1 Equivalence Des NormesHicham33100% (1)
- M1 Exercices Corriges PDFDocument15 pagesM1 Exercices Corriges PDFsamvip100% (1)
- Analysetd3 2011Document2 pagesAnalysetd3 2011ensimagPas encore d'évaluation
- Cor5 FibresDocument10 pagesCor5 FibresSadrackPas encore d'évaluation
- ExoafDocument18 pagesExoafhahar haurPas encore d'évaluation
- MAT431 DM2 EnonceDocument2 pagesMAT431 DM2 EnonceÉmir NairiPas encore d'évaluation
- ArguillereDocument29 pagesArguilleredetrez6803Pas encore d'évaluation
- Chapitre1 Topologie SMA5Document11 pagesChapitre1 Topologie SMA5Hassan oumahrirPas encore d'évaluation
- Poly Calcul DiffDocument11 pagesPoly Calcul Diffmyo dadoPas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
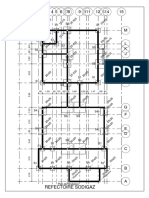
- Structure REFECTOIRE SODIGAZ PDFDocument44 pagesStructure REFECTOIRE SODIGAZ PDFheheheyPas encore d'évaluation
- Cours 3 ProthèseDocument4 pagesCours 3 ProthèseDDan2005Pas encore d'évaluation
- Estem: Eau Dans Le SolDocument27 pagesEstem: Eau Dans Le SolAlli BoukhchPas encore d'évaluation
- Cours OrdonnacementDocument17 pagesCours OrdonnacementMed ArefPas encore d'évaluation
- Karim, Ousmane Socé PDFDocument27 pagesKarim, Ousmane Socé PDFL’unique SuperboyPas encore d'évaluation
- Distr ProbaDocument37 pagesDistr ProbaOumaima OughnimaPas encore d'évaluation
- Examples Questions Examen AcoustiqueDocument4 pagesExamples Questions Examen AcoustiquePierreFontenellePas encore d'évaluation
- Exos PDT Conjugaison G1Document16 pagesExos PDT Conjugaison G1Olivier Benard100% (1)
- Act2 1Document4 pagesAct2 1nassima ghallabiPas encore d'évaluation
- Introduction A L'immunologieDocument9 pagesIntroduction A L'immunologieBalakibawi ESSOPas encore d'évaluation
- Sup'air SellettesDocument1 pageSup'air SellettesStefanoPas encore d'évaluation
- Soukhoï Su-57 - WikipédiaDocument10 pagesSoukhoï Su-57 - WikipédiaMohamed Lamine TourePas encore d'évaluation
- Cours de Gestion de Production 1.2.3 Gmp2 VPDocument30 pagesCours de Gestion de Production 1.2.3 Gmp2 VPMohamed SabrePas encore d'évaluation
- Mur Types PDFDocument76 pagesMur Types PDFWafaa ElyaâgoubiPas encore d'évaluation
- Solution TD3 Module POO Univ OuarglaDocument7 pagesSolution TD3 Module POO Univ OuarglaEmna KanzariPas encore d'évaluation
- NF EN 1993-1-7 NA Aout 2008Document4 pagesNF EN 1993-1-7 NA Aout 2008fauvyPas encore d'évaluation
- Sco BP1Document5 pagesSco BP1Philippe Diego DelasvegasPas encore d'évaluation
- Les Bases de La Thermodynamique 2 Chapitre II PDFDocument11 pagesLes Bases de La Thermodynamique 2 Chapitre II PDFmahdi amraouiPas encore d'évaluation
- Hygiène HospitalièreDocument4 pagesHygiène HospitalièreJamal MalouPas encore d'évaluation
- PDFDocument24 pagesPDFCompétitionPas encore d'évaluation
- Methode de TravailDocument2 pagesMethode de Travailamal akhoulouPas encore d'évaluation
- Jeremie Gouyon Ok-2Document289 pagesJeremie Gouyon Ok-2leucinedijaPas encore d'évaluation
- TIG Ta33 Panneau de Commande FRDocument22 pagesTIG Ta33 Panneau de Commande FRk.a55Pas encore d'évaluation
- Page D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningDocument1 pagePage D'accueil - Espace Élèves - PRONOTE 2023.0.2.7 - Centre National d' Enseignement E-LearningzhcczgfbmwPas encore d'évaluation
- Chauffeur SPLDocument1 pageChauffeur SPLmeryem.vfsPas encore d'évaluation
- Chimie QuantiqueDocument5 pagesChimie Quantiquedavinccicode100% (1)
- TD2 MCC Corrigé InfotroniqueDocument3 pagesTD2 MCC Corrigé InfotroniqueRima AlayaPas encore d'évaluation
- Item 362 - AesDocument4 pagesItem 362 - AesSofia RhellabPas encore d'évaluation
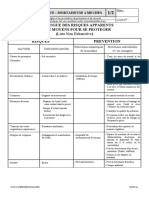
- S o Mortaiseuse MechesDocument2 pagesS o Mortaiseuse Mechesp bwPas encore d'évaluation