Académique Documents
Professionnel Documents
Culture Documents
Part B
Transféré par
عبدالوهاب الموفريTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Part B
Transféré par
عبدالوهاب الموفريDroits d'auteur :
Formats disponibles
MODELISATION DES
MACHINES ELECTRIQUES
TOURNANTES
Master 1,2 Electromécanique, Commande des Systèmes Electriques
APRIL 10, 2016
UNIVERSITÉ MOHAMED EL BACHIR EL’IBRAHIMI
Bordj Bou Arreridj
Chapitre 1
1 Modélisation d’une machine à courant alternatif triphasé
symétrique
1.1 Définitions et hypothèses :
1.1.1 Définition :
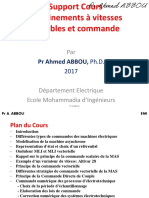
La machine est constituée de deux armatures bobinées, stator (fixe) et rotor (mobile),
chaque armature comporte un bobinage triphasé (A, B et C), chaque phase est représentée par
un bobinage diamétral équivalent.
(SA, SB, SC) : Système d’axe fixé au stator.
(RA, RB, RC) : Système d’axe fixé au rotor, il est positionné par l’angle θ par rapport (SA, SB,
SC).
1.1.2 Hypothèses :
Entrefer constant (réluctance constante).
La perméabilité magnétique est infinie (µR ∞).
Le bobinage de chacune des armatures est traversé par un système de courant triphasé
équilibré, tel que :
Dans le repère du stator : Dans le repère du rotor :
iSA I S cos(S t )
iRA I R cos(Rt )
iSB I S cos(S t 2 / 3) (1)
iRB I R cos(Rt 2 / 3) (2)
i I S cos(S t 4 / 3)
i I R cos(Rt 4 / 3)
SC RC
S, R: Indices stator (rotor).
Ism, IRm: Courants max du stator (rotor).
i : Courants instantanés.
ωS, ωR : Pulsations des courants rotorique et statorique.
Dr.choudar Adel, Univ-bba,DEP-ELM
SB
RB iSB
iRB
iRA
RA
SA
iSA
iSC
SC iRC
RC
Fig. 1.
1.2 Modèles des flux
1.2.1 Flux totalisé dans la phase A du stator
Le flux totalisé dans chaque bobine sera par exemple pour la phase A du stator
SA LS iS M S iS M S iS M RS AAiR M RS BAiR M RS CAiR (3)
A B C A B C
On définit :
LS LlS LmS : Inductance propre de la phase statorique.
LlS : Inductance de fuite (Leakage Inductance) ;
LmS : Inductance de magnétisation (Linkage Inductance)
LmS
MS : Inductance mutuelle entre phases du stator (les bobines sont fixées à 120°
2
l’une de l’autre, le trajet du flux est le même)
MR(A,B, C)-SA : Inductances mutuelles entre la phase SA et les autres phases du rotor ces
mutuelle sont en fonction de la position relative θ entre les deux armatures si l’on admet que
les mutuelles stator-rotor varient selon une fonction sinusoïdale.
Dr.choudar Adel, Univ-bba,DEP-ELM
M RS AA M 0 cos
M RS BA M 0 cos( 2 / 3) (4)
M M 0 cos( 4 / 3)
RS CA
Avec M0 la mutuelle maximale lorsque les deux bobines sur le même axe.
Système triphasé équilibré :
t, iS iS iS 0 iS iS iS (5)
A B C B C A
La substitution des équations (2), (4) et (5) dans (3) donne :
t, SA (LS MS )iS M 0 [cos()iR cos( 2 / 3)iR cos( 4 / 3)iR ]
A A B C
On définit par :
LCS : Inductance cyclique propre de l’armature du stator.
LmS 3
LCS LS MS LlS LmS LlS LmS (6)
2 2
L’expression du flux ( SA ) devienne,
SA LC iS M 0[cos()iR cos( 2 / 3)iR cos( 4 / 3)iR ]
A A B C
1.2.2 Flux totalisé dans les phases B et C du stator
Par analogie, les autres flux sont déduits,
SA LC iS M 0[cos()iR cos( 2 / 3)iR cos( 4 / 3)iR ]
A A B C
SB LC iS M 0 [cos( 2 / 3)iR cos()iR cos( 2 / 3)iR ] (7)
B A B C
SC LC iS M 0[cos( 4 / 3)iR cos( 2 / 3)iR cos()iR ]
C A B C
S ,ABC [SA SB SC ]T , I S ,ABC [iSA iSB iSC ]T
Avec,
[RA RB RC ]T , I R,ABC [iRA iRB iRC ]T
R,ABC
Dr.choudar Adel, Univ-bba,DEP-ELM
L’équation (7) peut être simplifier comme suit,
2 4
M 0 cos M 0 cos( ) M 0 cos( )
L 0 0 3 3
CS
4 2
(SS,ABC
)
0 LCS 0 I S(S,ABC
)
M 0 cos( ) M 0 cos M 0 cos( ) I R(R,ABC
) (8)
3 3
0 0 LCS 2 4
M 0 cos( ) M 0 cos( ) M 0 cos
3 3
LCS
M ( )
(SS,ABC
)
LCS I S(S,ABC
)
M ()I R(R,ABC
)
(9)
1.2.3 Flux totalisé dans les phases A, B et C du rotor
Même développement pour le rotor nous conduira aux résultats suivants,
(RR,ABC
)
M ()I S(S,ABC
)
LCR I R(R,ABC
)
(10)
1.2.4 Flux totalisé dans les phases SA, SB, SC, RA, RB et RC de la machine
T
Avec, X ABC [X S ,ABC ; X R,ABC ]T x SA x SB x SC x RA x RB x RC
L M ()
ABC CS I ABC L()I ABC (11)
M ( ) LCR
1.3 Modèles des tensions (Faraday)
D'après la loi de faraday, les tensions des enroulements statorique et rotorique peut
exprimer par,
d dL() dI
VABC RI ABC (L()I ABC ) RI ABC I ABC L() ABC
dt dt dt (12)
dL ( ) dI ABC
R I L()
dt ABC dt
1.4 Modèles d’état
Si nous prenons le vecteur courant comme un vecteur d’état et le vecteur tension comme un
vecteur entré,
Dr.choudar Adel, Univ-bba,DEP-ELM
dL() dI
VABC R I ABC L() ABC
dt dt
dI ABC dL( ) (13)
L1 () R I ABC L1
()VABC
dt dt
B ( )
A( )
t, SA (LS MS )iS
A
M 0I R cos cos Rt cos( 2 / 3)cos(Rt 2 / 3) cos( 4 / 3)cos(Rt 4 / 3)
m
f (,R ,t )
1
Avec : cos a cos b (cos(a b ) cos(a b))
2
1
cos cos Rt cos( Rt ) cos( Rt )
2
1
cos( 2 / 3)cos(Rt 2 / 3) cos( Rt ) cos( Rt 4 / 3)
2
1
cos( 4 / 3)cos(Rt 4 / 3) cos( Rt ) cos( Rt 2 / 3)
2
3
f (, R , t ) M I cos( Rt )
2 0 Rm
3
S (LS MS )iS M 0I R cos( Rt ) (14)
A A
2 m
Posons Rt R , S R S t
L’équation (6) devient
Dr.choudar Adel, Univ-bba,DEP-ELM
3
S (LS MS )iS M 0I R cos(S t ) (15)
A A
2 m
Même développement pour les phases SB et SC donne
3
S (LS MS )iS M 0I R cos(S t 2 / 3) ,
B B
2 m
3
S (LS M S )iS M 0I R cos(S t 4 / 3)
C C
2 m
On définit par :
MC=(3/2)M0 :Inductance cyclique mutuelle entre armature.
Donc :
LCS iS MC iR (S )
SA A A
SB LCS iSB MC iRB (S ) (16)
LCS iS MC iR (S )
SA C C
(S ) (S ) (S )
L 0 0 iSA M 0 0 iRA
SA CS C
0 LCS 0 iSB 0 MC 0 iRB (17)
SB
SC 0 0 LCS iSC
0 0 MC iRC
2 4
(S ) (S ) M 0 cos M 0 cos( ) M 0 cos( )
L 0 0 iSA 3 3 i (R)
SA CS RA
4 2
SB 0 LCS 0 iSB M 0 cos( ) M 0 cos M 0 cos( ) iRB (18)
0 3 3
SC 0 LCS iSC 2 4 iRC
M 0 cos( ) M 0 cos( ) M 0 cos
3 3
1.4.1 Flux d’armature rotorique
LCRiR MC iS (R)
RA A A
RB LCRiRB MC iSB (R) (19)
LCRiR MC iS (R)
RA C C
(R ) (R )
L 0 0 iRA M 0 0 iSA
RA CR C
0 LCR 0 iRB 0 MC 0 iSB (20)
RB
RC 0 0 LCR iRC
0 0 MC iSC
Dr.choudar Adel, Univ-bba,DEP-ELM
4 2
(R ) M 0 cos M 0 cos( ) M 0 cos( )
L 0 0 iRA 3 3 i (S )
RA CR SA
2 4
0
RB LCR 0 iRB M 0 cos( ) M 0 cos M 0 cos( ) iSB (21)
3 3
RC 0 0 LCR iRC
4 2 iSC
M 0 cos( ) M 0 cos( ) M 0 cos
3 3
LCR=LR-MR : Inductance cyclique propre de l’armature du rotor.
1.4.2 Représentation matricielle du flux d’armature
(S ) (S ) (S ) (S ) (R )
S _ ABC LCS I S _ABC MC I R _ABC LCS I S _ABC M ()I R _ ABC (22)
(R )
MC I S(R_)ABC LCR I R(R_)ABC M ()I S(S_)ABC LCRI R(R_)ABC
R _ ABC
i i
SA RA SA RA
Avec : S _ABC S , R _ABC R , I S _ABC iS , I R _ABC iR .
B B B B
S R iS iR
C C C C
L 0 0 L 0 0
CS CR
LCS 0 LCS 0 , LCR 0
LCR 0 ,
0 0 LCS 0 0 LCR
4 2
M 0 cos M 0 cos( ) M 0 cos( )
3 3
2 4
M () M 0 cos( ) M 0 cos M 0 cos( )
3 3
4 2
M 0 cos( ) M 0 cos( ) M 0 cos
3 3
X (S )
Avec X ABC S(R_)ABC , X I ,V ou , l’équation (14) devienne
X R _ ABC
L M ()
ABC
CS
I M ()I ABC (23)
M ( ) LCR ABC
1.5 Equations électriques
De la figure (1) les équations électriques du modèle de la machine asynchrone triphasée
s’écrivent :
Dr.choudar Adel, Univ-bba,DEP-ELM
v R 0 0 iSA
SA SA S
v d 0 RS 0 . iSB (24)
SB SB
dt
v
SC SC 0 0 RS iSC
v R 0 0 iRA
RA RA R
v d 0 RR 0 . iRB (25)
RB RB
dt
vRC RC 0 0 RR iRC
Avec v, i et Ф représentent respectivement la tension, le courant et le flux.
RS : La résistance statorique.
RR : La résistance rotorique.
R 0 0 R 0 0
S R R 0
Avec RS 0 RS 0 , RR 0
RR 0 , R S , l’équation (16,17) deviennes
0 RR
0 0 RS 0 0 RR
d
VABC RI ABC (26)
dt ABC
Couple :
1.6 Modèle d’état de la machines Asynchrone
Dr.choudar Adel, Univ-bba,DEP-ELM
1.7 Transformation Vectorielle
1.7.1 Transformée de Clarke
La transformée de Clarke, est un outil mathématique utilisé en électrotechnique, et en
particulier pour la commande vectorielle, afin de modéliser un système triphasé grâce à un
modèle diphasé. Il s'agit d'un changement de repère. Les deux premiers axes dans la nouvelle
base sont traditionnellement nommés , . Les grandeurs transformées sont généralement des
courants, des tensions ou des flux.
Elle est justifiée par la reproduction de la même Fmm entre les deux types de bobinage
Fmm3~=Fmm2~.
1.7.2 Transformée de Concordia
La transformée de Concordia est très similaire à la transformée de Clarke, à la différence
qu'elle est unitaire. Les puissances calculées après transformation sont donc les mêmes que dans
le système initial, ce qui n'est pas le cas pour la transformée de Clarke.
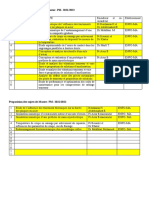
iB i A,B,C to α ,β
N
N
30°
N iA
N i
30°
N
iC
Fig. 2. Principe de la transformation A,B,C- α,β
N, N’: nombre fictif de spires.
L’équivalence entre les deux systèmes impose que :
Dr.choudar Adel, Univ-bba,DEP-ELM
Projection/α (Fig. 3): N i NiA NiB sin 30 NiC sin 30
Projection/β (Fig. 3): N i 0 NiB cos 30 NiC cos 30
1 1
i k (iA iB iC )
2 2 N
,k (27)
3 3 N'
i k (0 iB iC )
2 2
k : Coefficient de normalisation.
k 2 3 : Transformation linéaire de Clarke.
k 2 3 : Transformation linéaire de Concordia.
Dans le cas : iA iB iC 0 , iA iB iC ,
1 3 2
i k(iA iA ) k iA , si i iA , alors k
2 2 3
En écriture matricielle le système (15) s’écrira :
i 1 1 1 iA i
A
k 2 2 i T i (28)
i B
3 3 B
0 i iC
2 C
2
C 32
1.7.3 Composante homopolaire (symétrique)
Puisque la matrice [C32] est non inversible, la transformation α,β est non réversible, , il
faut donc ajouter la composante homopolaire i0 dans [C32].
i0 k0 iA iB iC (29)
Pour un système équilibré, i0=0.
1 1 1
i 2 2 i i
A A
3 3
i
k0 iB T i
B (30)
i 2 2
0 k k k i iC
0 0 0 C
k k k
T
Dr.choudar Adel, Univ-bba,DEP-ELM
Le coefficient k0 est choisis comme suit :
1 1 1
2 2
3 3
T k0 kM
2 2
k k k
0 0 0
k k
k
M
i, ,0 kMiA,B,C (31)
1 1
iA,B ,C M i, ,0 (32)
k
1 k
1 1 1 1 0
2k0
2 2
3 3 2 1 3 k
M 1 0
2 2 3 2 2 2k0
k k0 k0
0 1 3 k
k k k
2 2 2k0
MT
2 T
Pour que M 1 M il faut prendre :
3
k0 k 2 k2 k
k0 k0
k 2k0 2 2
La matrice T devienne :
1 1
1
2 2
3 3
T k 0 (33)
2 2
1 1 1
2 2 2
Et la matrice inverse T-1 :
1
1 0
2
1 2 1 3 1
T 1 (34)
k 3 2 2 2
1 3 1
2 2
2
Dr.choudar Adel, Univ-bba,DEP-ELM
12 T
iA,B ,C T 1i, ,0 M i, ,0 (35)
k3
1.7.4 Détermination du coefficient k
Il existe deux approches utilisées pour déterminer le coefficient k :
Première approche (conservation de la puissance totale)
PA,B ,C P, iAvA iBvB iC vC iv i v iAT,B ,C vA,B ,C iT, v,
(36)
12 T 12 T
T
(22) iAT,B ,C i, ,0 M T i M (37)
k3 k 3 , ,0
La substitution de l’équation (24) dans (23) donne,
12 T
i, MvA,B ,C iT, v, (38)
k3
1
(18) MvA,B,C v (39)
k ,
La substitution de l’équation (26) dans (25) donne,
12 T 1
i, v, iT, v,
k3 k
2
1 2
1 (40)
k 3
2
k (Transformé de Concordia)
3
1
1 1 1 0
1
2 2 2
2 3 3 2 1 3 1
T 0 ,T 1 TT (41)
3 2 2 3 2 2 2
1 1 1
1 1
3
2
2 2 2 2
2
Deuxième approche (conservation de la puissance par phase)
PA,B,C P,
(42)
3 2
Dr.choudar Adel, Univ-bba,DEP-ELM
2
1 2 1
(27) et (28) 3
k 3 2
2
k (Transformé de Clarke)
3
1.7.5 Allures des grandeurs dans le plan diphasé stationnaire
1 3 3
(15) i k iA (iB iC )
i kiA kI cos(wst )
2 2 2 (43)
3
iA iB iC 0 iB iC iA i kI sin(wst )
2
1.8 Développement du modèle de la MAS dans le repère (α,β)
1.8.1 Equations électromagnétiques
Le vecteur tension global (stator et rotor) dans le plan (A,B,C) est :
d
VABC RI ABC (44)
dt ABC
V 0 TVABC (45)
T T 0
VABC V T TV 0
T 0
(46)
0 T
V I T 0
Avec, V 0 S _ 0 , I 0 S _ 0 ,T
V
R _ 0 I
R _ 0 0 T
d 1
T 1V RT 1I (T )
dt
d dT 1
TT 1V TRT 1I T (T 1 )
dt dt
d
V RI (47)
dt
(S )
S _ABC LCS iS _ABC MC iR _ABC
(S ) (S ) (S ) 1 (S ) 1 (S )
S _ 0 TLCST iS _ 0 TMCT iR _ 0
(R ) (R )
R _ ABC MC iS(R_)ABC LCRiR(R_)ABC
TMCT 1iS(R_) 0 TLCRT 1iR(R_) 0
R _ 0
Dr.choudar Adel, Univ-bba,DEP-ELM
TLCST 1 LCSTIT 1 LCS I LCS
TLCRT 1 LCRTIT 1 LCR I LCR
TMCT 1 MCTIT 1 MC I M C
d (S ) d d
(S )
(S ) (S )
S _ 0 LCS iS(S_) 0 MC iR(S_) 0
S _ 0 L i M i
(R )
CS S _ 0 C R _ 0
dt dt dt
M i (R )
L i (R )
d
(R) d d
R _ 0
C S _ 0 CR R _ 0
MC iS(R_) 0 LCR iR(R_) 0
dt
R _ 0
dt dt
cos() sin() 0
iR(S_) 0 sin() cos() 0 iR(R_) 0 M 0 ()iR(R_) 0
0 0 0
iS(R_) 0 M 0 ()iS(S_) 0 M
T
0
()iS(S_) 0
d (S ) d (S ) d
S _ 0 LCS I S _ 0 MC
M 0 ()I R(R_) 0
dt dt dt
d d d
dt
( R )
R _ 0 MC
dt
(
dt
M 0 ()I S _) 0 LCR I R(R_) 0
T S
d (S ) d d d
S _ 0 LCS I S(S_) 0 MC M 0 () I R(R_) 0 MC M 0 () I R(R_) 0
dt dt dt dt
A1 ( )
A2 ( )
d (R ) d d d T
R _ 0 LCR I R(R_) 0 MC M T
( ) I S(S_) 0 MC M () I S(S_) 0
dt dt dt
0
dt
0
A3 ( )
A4 ( )
Evaluation des Matrices A1, A2, A3, et A4
M cos() M sin() 0
C C
A1() MC M 0 () MC sin() MC cos( ) 0
0 0 0
M sin() M cos() 0
C C
d
A2 () MC M 0 () MC cos() MC sin() 0
dt
0 0 0
M sin( ) M cos() 0
C C
A2 () MC cos() MC sin() 0
0 0 0
Dr.choudar Adel, Univ-bba,DEP-ELM
M cos() M sin() 0
C C
A3 () MC M 0 ( ) MC sin() MC cos() 0 A1 ()T
T
0 0 0
M sin() M cos() 0
C C
A () M d M T () M cos() M sin() 0
4 C
dt 0
C C
0 0 0
A4 () A2 ()T
d (S ) d (S ) d (R )
S _ 0 LCS I S _ 0 A1() I R _ 0 A2 ()I R _ 0
(R )
dt dt dt
d d d (S )
( R ) ( R )
R _ 0 LCR I R _ 0 A1()T
I S _ 0 A2 ( )I S(S_) 0
dt
dt dt
d 0 A2 () L A1 () d
0 I CS I (48)
dt A2 ()
T
0 0 A1( )T LCR dt 0
G ( ) L ( )
0 0 0 M C sin() MC cos() 0
0 0 0 M C cos() MC sin() 0
0 A2 () 0 0 0 0 0 0
G ( ) (49)
A2 ( )
T
0 MC sin() MC cos() 0 0 0 0
MC cos() M C sin() 0 0 0 0
0 0 0 0 0 0
LCS 0 0 MC cos() MC sin() 0
0 LCS 0 MC sin( ) MC cos() 0
L
A1() 0 0 LCS 0 0 0
L ( ) CS T (50)
A1() LCR MC cos() MC sin( ) 0 LCR 0 0
MC sin() M C cos() 0 0 LCR 0
0 0 0 0 0 LCR
d
V RI G ()I 0 L () I 0
dt
d
I L ()1 R G () I 0 L ()1 V
dt 0
A( ) B ( )
Dr.choudar Adel, Univ-bba,DEP-ELM
d
I A()I 0 B()V (51)
dt 0
RS LCR MC2 0 MC RR cos MC LCR sin MC RR sin MC LCR cos 0 (52)
M 2
RS LCR 0 MC RR sin MC LCR cos MC RR cos MC LCR sin 0
C
1 RS
0 0 0 0 0
LCS
A( )
MC RS cos MC LCS sin MC RS sin MC LCS cos 0 RRLCS MC2 0
2
MC RS sin MC LCS cos MC RS cos MC LCS sin 0 MC RRLCS 0
1 RR
0 0 0 0 0
LCR
L 0 0 MC cos MC sin 0
CR
0 LCR 0 MC sin MC cos 0
1
0 0 0 0 0
LCS
B() (53)
MC cos MC sin 0 LCS 0 0
M sin M cos 0 0 LCS 0
C C
1
0 0 0 0 0
LCR
1
avec , S LCS , R LCR , M MC ;
MC2 LCS LCR
RS R M MC 0 M RR cos M LCR sin M RR sin M LCR cos 0
(54)
M MC RS R 0 M RR sin M LCR cos M RR cos M LCR sin 0
R
0 0 S 0 0 0
LCS
A()
M RS cos M LCS sin M RS sin M LCS cos 0 RRS M MC 0
R sin L cos R cos L sin 0 M MC RRS 0
M S M CS M S M CS
R
0 0 0 0 0 R
LCR
0 0 M cos M sin 0
R
0 R 0 M sin M cos 0
1
0 0 0 0 0
LCS
B() (55)
M cos M sin 0 S 0 0
sin cos 0 0 S 0
M M
1
0 0 0 0 0
LCR
Dr.choudar Adel, Univ-bba,DEP-ELM
Simplification
Les machines électriques triphasées sont équilibrées, doux, la composante homopolaire
est nulle, doc, nous pouvons simplifier le modèle comme suit,
d
I A()I B ()V (56)
dt
Sachant que,
RS R M MC M RR cos M LCR sin M RR sin M LCR cos
M MC RS R M RR sin M LCR cos M RR cos M LCR sin
A()
M RS cos M LCS sin M RS sin M LCS cos RR S M MC
R sin L cos R cos L sin M MC RR S
M S M CS M S M CS
(57)
Et
0 M cos M sin
R
0 R M sin M cos
B () (58)
M cos M sin S 0
sin cos 0 S
M M
1.8.2 Equations électromécaniques
Le couple électromagnétique d’un system électromécanique biphasé est donné par l’expression
générale suivante (chapitre 01)
Dr.choudar Adel, Univ-bba,DEP-ELM
1.8.2.1 Couple électromagnétique
1.8.3 Transformée de Park
1.8.3.1 Historique
Robert H. Park a proposé pour la première fois la transformée en 1929. En 2000, cet article
a été classé comme étant la deuxième publication ayant eu le plus d'influence dans le monde de
l'électronique de puissance au XXe siècle1.
La transformée de Park est un outil mathématique afin de réaliser un changement de
repère dans un système d'axe. Cette transformation permet d’obtenir des grandeurs constantes
à partir de grandeurs sinusoïdales. Elle est constituée de deux transformations (figure 4) :
Une transformation triphasée-diphasée (on passe d’un repère (a,b,c) à un repère (α,β) )
Une rotation directe avec un angle (θS), qui permet de passer d’un repère (α,β) à un
repère (d,q).
1
High impact papers in Power Engineering, 1900-1999, NAPS, University of Waterloo, Canada, October 23-24,
2000
Dr.choudar Adel, Univ-bba,DEP-ELM
β
q x
iβ Rotation
N2
N2
iq N2 d
id
φ
θ N2
α
iα
Fig. 3. Représentation des Forces magnétomotrices dans le Repère arbitraire (d,q)
1.8.3.2 Force magnétomotrice résultante dans le repère arbitraire (d,q)
De la figure (5), la force magnétomotrice résultante dans la position (x) est :
Fx Fx F x N 2i cos() N 2i sin() (59)
On substitue ( ) dans l’équation (30),
Fx N 2i cos( ( )) N 2i sin( ( ))
N 2i cos()cos( ) sin()sin( ) N 2i sin()cos( ) cos( )sin( )
N 2i cos() N 2i sin( ) cos( ) N 2i sin() N 2i cos() sin( )
F F
d
q
Fd x Fq x
Fd N 2id N 2i cos() N 2i sin() id i cos() i sin()
(60)
Fq N 2iq N 2i sin() N 2i cos() iq i sin( ) i cos( )
En écriture matricielle
i cos() sin() i
d
i sin() cos() i (61)
q
i0 0i 0i i0
i cos() sin() 0 i
d
(31) iq sin( ) cos() 0 i (62)
i 0 0
1 i0
0
Dr.choudar Adel, Univ-bba,DEP-ELM
1.8.3.3 Allures des courants dans le plan diphasé arbitraire (d,q)
id i cos() i sin() I cos(s t )cos() I sin(st )sin() Icos(st ) (63)
i i sin() i cos() I cos(s t )sin() I sin(s t )cos() I sin(s t )
q
En distingue trois cas différents, selon l’angle θ :
d
Premier cas s
dt
d
s d sdt s t 0
dt
id I cos(st st 0 ) I cos(0 ) const
(34)
(64)
i I sin(st st 0 ) I sin(0 ) const
q
d
deuxième cas r
dt
d
r d rdt rt 0
dt
id I cos(st rt 0 ) I cos((s r )t 0 ) (65)
iq I sin(st rt 0 ) I sin((s r )t 0 )
d
troisième cas 0
dt
d
0 0 const
dt
id I cos(st 0 ) (66)
i I sin(st 0 )
q
1.8.3.4 Détermination de la matrice de Park A, B,C d, q, 0
i cos() sin() 0 i
d
(31) iq sin( ) cos() 0 i
i 0 0
1 i0
0
R( )
i 1 cos(120) cos(120) i
A
i k 0 sin(120) sin(120) i
B
i i
0 0 0 1 C
T
Dr.choudar Adel, Univ-bba,DEP-ELM
i i
d A
i R()T i
q B
i P ( ) i
0 C
cos() sin() 0 1 cos(120) cos(120)
P( ) k sin() cos() 0 0 sin(120) sin(120)
0 0 1 k 0 k0 k0
k k k
cos() cos() cos(120) sin( )sin(120) cos() cos(120) sin() sin(120)
P( ) k sin() sin()cos(120) cos()sin(120) sin()cos(120) cos()sin(120)
k0 k0 k0
k k k
cos()cos(120) sin()sin(120) cos( 120)
cos()cos(120) sin()sin(120) cos( 120)
sin() cos(120) cos( )sin(120) sin( 120)
sin() cos(120) cos() sin(120) sin( 120)
cos() cos( 120) cos( 120)
P( ) k sin() sin( 120) sin( 120) (67)
k0 k0 k0
k k k
Le coefficient k0 est choisis afin que P( )1 P ()T
P( )1 P( )T P ()P ()T I
T
cos cos
2 2
/3 cos /3 cos cos
2 2
/3 cos /3
PPT k 2 sin sin
2 2
/3 sin /3 sin sin
2 2
/3 sin /3
k0 k0 k0 k0 k0 k0
k k k k k k
Remarque : Ces calculs sont effectués à l’aide du Logiciel « Scientific WorkPlace 5.5 »
Dr.choudar Adel, Univ-bba,DEP-ELM
P 11 k 2 cos 2 23 k 2 cos 2 2
3
k 2 cos 2 32 k 2 cos 2 32 k 2 sin 2 32 k 2
P 22 k 2 sin 2 23 k 2 sin 2 2
3
k 2 sin 2 32 k 2 cos 2 32 k 2 sin 2 32 k 2
P 33 3k 20
P 12 P 21 k 2 cos 23 sin 23 k 2 cos 2
3
sin 2
3
k 2 cos sin 0
P 13 P 31 kk 0 cos 23 kk 0 cos 2
3
kk 0 cos 0
P 23 P 32 kk 0 sin 23 kk 0 sin 2
3
kk 0 sin 0
3 2 2
P11 P22 k 1k (68)
2 3
1
P33 3k 0 1 k 0 (69)
3
cos cos( 2 / 3) cos( 2 / 3)
2
P () sin sin( 2 / 3) sin( 2 / 3) (70)
3
1 1 1
2 2 2
1
cos sin
2
P ()
1 T
P () 2 1
cos( 2 / 3) sin( 2 / 3) (71)
3 2
1
cos( 2 / 3) sin( 2 / 3)
2
1.9 Développement du Modèle de la MAS dans le Repère de Park
x x
d A
x P ( ) x
q S B
x x
0 C
v R 0 0 iSA
SA d SA S
v 0 RS 0 . iSB
SB SB
dt
vSC SC 0 0 RS iSC
La multiplication des deux côtés par P(θ) donne :
Dr.choudar Adel, Univ-bba,DEP-ELM
v i
SA SA SA
d
P( ) vSB P () SB P ()RS . iSB
dt
vSC SC iSC
v i
Sd d SA Sd
v P () R . i
Sq S Sq
dt SB
vS 0 SC iS 0
SA Sd Sd Sd
d d d
P ( )1 P ()1
1 d
P ( ) Sq Sq
dt SB dt dt Sq dt
SC S 0 S 0 S 0
v
Sd Sd Sd
v P ( ) P ()1 d d P ()1
Sq Sq
dt Sq dt
v
S 0
S 0 S 0
(72)
Sd Sd
d d
Sq P () P ()1 Sq
dt dt
S 0 Y S 0
d d
Y P () P ()1 P( ) P ()T
dt dt
cos S cos(S 2 / 3) cos(S 2 / 3) sin S cos S 0
2
S sin S sin(S 2 / 3) sin(S 2 / 3) sin(S 2 / 3) cos(S 2 / 3) 0
3 sin( 2 / 3) cos( 2 / 3) 0
1 1 1 S S
2 2 2
0 3 0
2 0 1 0
2 3
S 0 0 S 1 0 0
3 2
0 0 0 0 0 0
Substituant Y dans (43)
v 0 1 0
Sd Sd Sd
v d 1 0 0 (73)
Sq Sq S Sq
dt
v
S 0
S 0 0 0 0 S 0
V d 0 1 1 0 i
(44) Sd Sd S Sd
1 0 RS
Sd
0 1 . i (74)
Sq dt Sq
V Sq Sq
Dr.choudar Adel, Univ-bba,DEP-ELM
V 0 1 1 0 i
Rd d Rd Rd Rd
V dt R 1 0 RR 0 1 . i (75)
Rq Rq Rq Rq
L 0 iSd MC 0 iRd
Sd CS
0 L i 0 M i
Sq CS Sq C Rq
(76)
L
0 iRd MC 0 iSd
Rd CR
0 L i 0 M i
Rq CR Rq C Sq
L 0 MC 0 iSd
Sd CS
0 L 0 MC iSq
(47) Sq CS
0 iRd
Rd MC 0 LCR
0 M 0 LCR iRq
Rq C
V 0 0 0 Sd RS 0 0 0 iSd
Sd Sd S
V 0 Sq 0 RS 0 0 iSq
d 0 0
(45) et (46) Sq Sq S .
Rd dt Rd 0
V 0 0 R Rd 0 0 RR 0 iRd
V 0 RR iRq
Rq Rq 0 0 R 0 Rq 0 0
V L 0 MC
0 iSd
Sd CS
V 0 L 0 MC d iSq
Sq CS
V M 0 LCR 0 dt iRd
Rd C
V
Rq
0 MC 0 LCR iRq
0 0
0 LCS 0 MC 0 RS 0 0 0 iSd
S
0 0 0 0 LCS 0 MC 0 RS 0 0 iSq
S
.
0 0 0 R MC 0 LCR 0 0 0 RR 0 iRd
0 0 R 0 0 MC 0 LCR 0 0 0 RR iRq
V L 0 MC 0 iSd RS S LCS 0 S MC iSd
Sd CS
V 0 L 0 MC d iSq S LCS RS S MC 0 iSq
Sq CS
.
V M 0 LCR 0 dt iRd 0 RMC RR RLCR iRd
Rd C
V
Rq 0 MC 0 LCR iRq RMC 0 RLCR RR iRq
A1 A2
i i V i V
Sd Sd Sd Sd Sd
i i V i
d Sq
A 1
A . Sq A 1 Sq / I Sq ; V VSq ; A A 1A ; B A 1
dt iRd 1 2
iRd
1 V
Rd
i
Rd
V
Rd
1 2 1
i i V i V
Rq Rq Rq Rq Rq
d
I AI BV
dt
Dr.choudar Adel, Univ-bba,DEP-ELM
RS LCR RMC2 S LCS LCR MC RR (R S )MC LCR
RMC2 S LCS LCR RS LCR (R S )MC LCR M C RR ,
A
MC RS (R S )MC LCS RRLCS S MC2 RLCS LCR
(R S )MC LCS MC RS S MC2 RLCS LCR RRLCS
L 0 MC 0
CR
0 LCR 0 M C
B
MC 0 LCS 0
0 MC 0 LCS
1 / (MC2 LS LR )
Commande vectorielle de la machine asynchrone
A- Équations des tensions
V d 0 1 1 0 i
(44) Sd Sd S Sd R
Sd
0 1 . i (77)
V
dt Sq 1 0 S
Sq Sq Sq
V 0 1 1 0 i
Rd d Rd Rd Rd
V dt R 1 0 RR 0 1 . i (78)
Rq Rq Rq Rq
Sd LCS iSd MC iRd ...(1) M
(S )
(4) iRq C iSq ...(6)
LCS iSq MC iRq ...(2) LCR
Sq
Rd LCRiRd MC iSd ...(3) MC2
(6) (2) Sq LCS i
(R) Sq
L i M i 0...(4)
LCR
Rd CR Rq C Sq
Dr.choudar Adel, Univ-bba,DEP-ELM
d d
VRd Rd RRq RRiRd 0
R i 0...(1)
dt
dt R R Rd
d
VRq Rq RRd RRiRq 0
R R RRiRq 0...(2)
dt
M
iRq C iSq .............(3)
LCR
MC2
Sq LCS i ...(4)
L Sq
CR
M
(3) (2) RR RR C iSq 0.............(*)
LCR
1
MC iSd iRd ......(5)
LCR Rd
1 d RR
(5) (1) R iSd ...(**)
MC dt MC LCR R
3PM
Tem I .................(* * *)
2LCR R Sq
R M
(*) R R C iSq S R P .............(e1)
LCRR
RR LCR k
(**) R R iSd R i ...(e2)
MC LCR RR 1 s Sd
M L L
k C CR , CR .
RR RR
iSq* PI (* )
*
iSd PI (*R R )
d
VSd Sd RSq RS iSd
dt
d
VSq Sq S Sd RS iSq
dt
MC
i iSq .............(3)
Rq
L
CR
2
L MC i ...(4)
CS L Sq
Sq
CR
Dr.choudar Adel, Univ-bba,DEP-ELM
Vous aimerez peut-être aussi
- TP Modelisation de La Machine Asynchrone A CageDocument9 pagesTP Modelisation de La Machine Asynchrone A CageOuuji SamaPas encore d'évaluation
- TP Modelisation de La Machine Asynchrone A Cage PDFDocument9 pagesTP Modelisation de La Machine Asynchrone A Cage PDFZH HamzaPas encore d'évaluation
- Modélisation Et Simulation D'un Moteur Asynchrone: 2 Année Master S3 (ELM)Document7 pagesModélisation Et Simulation D'un Moteur Asynchrone: 2 Année Master S3 (ELM)Khodja AymenPas encore d'évaluation
- Chapitre 3 Partie 3Document11 pagesChapitre 3 Partie 3Mohamed AlPas encore d'évaluation
- Chapitres 01,02 Et 03Document36 pagesChapitres 01,02 Et 03DjafarPas encore d'évaluation
- Examen-Rattrapage - SMP-S4 - Electricité III - 2019-2020Document2 pagesExamen-Rattrapage - SMP-S4 - Electricité III - 2019-2020anas habachiPas encore d'évaluation
- Série de Physique Thème: Dipôle RL+ Circuit RLC Amorti Exercice N°1Document2 pagesSérie de Physique Thème: Dipôle RL+ Circuit RLC Amorti Exercice N°1Amine AlaoUii AlaouiPas encore d'évaluation
- TD - Structures Et Propriétés de Bases Des MatériauxDocument1 pageTD - Structures Et Propriétés de Bases Des MatériauxIshaq HajPas encore d'évaluation
- Support Cours Entrainement À Vitesse Variable Et Commande - CopieDocument147 pagesSupport Cours Entrainement À Vitesse Variable Et Commande - CopienouhailaPas encore d'évaluation
- Commande Des Machines Electriques Chap 3Document21 pagesCommande Des Machines Electriques Chap 3said houairi100% (1)
- Thu 35 52Document18 pagesThu 35 52Anass BakPas encore d'évaluation
- 14 Chapitre002Document17 pages14 Chapitre002brightnsenga935Pas encore d'évaluation
- Mod MasDocument6 pagesMod Mashakim100% (1)
- Chapitre 4 CSca VE 20 21Document44 pagesChapitre 4 CSca VE 20 21Mohamed WarkzizPas encore d'évaluation
- TP Modélisation de La Machine Asynchrone A CageDocument9 pagesTP Modélisation de La Machine Asynchrone A CageRafiq80% (5)
- Commande Classique de La Machine Asynchrone - 2014 - 2015Document17 pagesCommande Classique de La Machine Asynchrone - 2014 - 2015nnPas encore d'évaluation
- TP3 Mas 2023 2024Document4 pagesTP3 Mas 2023 2024Bį BįčhøūPas encore d'évaluation
- Cours1 ELT-ME M1 Commande ÉlectriqueDocument11 pagesCours1 ELT-ME M1 Commande ÉlectriqueAli SaihiPas encore d'évaluation
- Partie FinalDocument26 pagesPartie FinalSalim BelkhirPas encore d'évaluation
- CH 2 Modélisation de La MAS Et de Son AlimentationDocument23 pagesCH 2 Modélisation de La MAS Et de Son AlimentationIlyes IsaacPas encore d'évaluation
- Chap. II Modélisation de La Machine Asynchrone TriphaséDocument8 pagesChap. II Modélisation de La Machine Asynchrone TriphaséElysee Mukanya mwanabutePas encore d'évaluation
- Chap 4 Trace en PlanDocument15 pagesChap 4 Trace en Plansandra massdez100% (1)
- TP Physique 2Document5 pagesTP Physique 2Salah DjebailiPas encore d'évaluation
- Mas Determination Des Elements Du Schema Equivalent F Boucher P DesneDocument4 pagesMas Determination Des Elements Du Schema Equivalent F Boucher P Desnemelmoth42Pas encore d'évaluation
- 4 Sc. I - Bac 2010 - Session Cont. - Corrigée - Physique - CDocument4 pages4 Sc. I - Bac 2010 - Session Cont. - Corrigée - Physique - CMamoo MoutiâPas encore d'évaluation
- Chapitre 4 MASDocument16 pagesChapitre 4 MASZaki ZakariaPas encore d'évaluation
- Evaluation Du Premier SemestreDocument4 pagesEvaluation Du Premier SemestrekathyPas encore d'évaluation
- TD N 3 SolutionDocument3 pagesTD N 3 SolutionSamira ChochoPas encore d'évaluation
- Exercices Corrigés Microcontrôleur Du Bac Technique en TunisieDocument28 pagesExercices Corrigés Microcontrôleur Du Bac Technique en TunisieLacina Bakayoko50% (2)
- TDs P.B.M+correctionDocument17 pagesTDs P.B.M+correctionilhame oulahcenPas encore d'évaluation
- TP Modélisation Et Simulation Des Moteurs AsynchronesDocument2 pagesTP Modélisation Et Simulation Des Moteurs AsynchronesSaad BenyahiaPas encore d'évaluation
- TD - Electronique Embarquée VFDocument5 pagesTD - Electronique Embarquée VFFatima100% (1)
- DM4-Induction LaplaceDocument8 pagesDM4-Induction Laplaceaymane el hachimiPas encore d'évaluation
- Modélisation de La Machine Synchrone À Aimant PermanentDocument10 pagesModélisation de La Machine Synchrone À Aimant PermanentElalami AsmaePas encore d'évaluation
- TP MG 3Document3 pagesTP MG 3LAALAIFAICELPas encore d'évaluation
- Position D Un Solide CorrigeDocument4 pagesPosition D Un Solide Corrigekurts010Pas encore d'évaluation
- Commande VectorielleDocument38 pagesCommande VectorielleOthman DakirPas encore d'évaluation
- 152 2 Pince Ericc3 Version2 CorrigeDocument2 pages152 2 Pince Ericc3 Version2 CorrigeChaymae OuahmanePas encore d'évaluation
- TD N°3 Fonctions de L'electroniqueDocument6 pagesTD N°3 Fonctions de L'electroniquejayefPas encore d'évaluation
- Devoir de Synthèse N°1 - Sciences Physiques - 3ème Sciences Exp (2016-2017) MR Manai Houcine PDFDocument2 pagesDevoir de Synthèse N°1 - Sciences Physiques - 3ème Sciences Exp (2016-2017) MR Manai Houcine PDFRiahi ChirazPas encore d'évaluation
- TDDocument2 pagesTDChaker AmirPas encore d'évaluation
- Physique 2Document4 pagesPhysique 2Brisni MbobiPas encore d'évaluation
- TD Corrigés D'électromagnétismeDocument16 pagesTD Corrigés D'électromagnétismeHamid ZitouniPas encore d'évaluation
- Differents Strategies de Modulation PDFDocument27 pagesDifferents Strategies de Modulation PDFAbdelmalik BendaikhaPas encore d'évaluation
- Memoire Finaleee3Document44 pagesMemoire Finaleee3Bilal CheboukiPas encore d'évaluation
- Revision Electricite PR SEDRA PDFDocument19 pagesRevision Electricite PR SEDRA PDFASMAPas encore d'évaluation
- Cours de Béton2 (1)Document53 pagesCours de Béton2 (1)Adnane OURABAHPas encore d'évaluation
- TP # - 2 PDFDocument6 pagesTP # - 2 PDFAya IrmaPas encore d'évaluation
- TD N°1 Elément de Module Circuits Et Réseaux Électriques.Document3 pagesTD N°1 Elément de Module Circuits Et Réseaux Électriques.ELFargaliMohamed0% (1)
- Robot Spirit: 1 PrésentationDocument7 pagesRobot Spirit: 1 Présentationmxmzllr2Pas encore d'évaluation
- TDN1 2 3 23Document13 pagesTDN1 2 3 23lahloulamia2020Pas encore d'évaluation
- Complement Cours Osc Pont de WienDocument4 pagesComplement Cours Osc Pont de Wienassia guzel0% (1)
- Osc Pont de WienDocument4 pagesOsc Pont de Wienassia guzelPas encore d'évaluation
- Upload - Série D'exercices N°10-Pic-2014-2015-CorrectionDocument28 pagesUpload - Série D'exercices N°10-Pic-2014-2015-CorrectionHabib Ben Ammar100% (2)
- ElectroMagnétisme-Contrôle-n-1-avec-Correction-2007-2008 by RayDocument10 pagesElectroMagnétisme-Contrôle-n-1-avec-Correction-2007-2008 by Raykurts010Pas encore d'évaluation
- Cours Commande Chap4Document16 pagesCours Commande Chap4Youcef BistoPas encore d'évaluation
- TD2 - Cine - 2017 18Document4 pagesTD2 - Cine - 2017 18Wael YossraPas encore d'évaluation
- Modélisation MASDocument11 pagesModélisation MASD.S. Officiel.Pas encore d'évaluation
- Chimie Exercises - 1Document5 pagesChimie Exercises - 1whoseven0Pas encore d'évaluation
- Résumé Du Cours PCMDocument11 pagesRésumé Du Cours PCMJohannes UllPas encore d'évaluation
- CENTRALE D ALARME MP508. Manuel D Installation Et de Programmation SimplifiéesDocument10 pagesCENTRALE D ALARME MP508. Manuel D Installation Et de Programmation SimplifiéesMaarouf Ben AkachaPas encore d'évaluation
- A3 Projet CVC Revit ARCHI MEP 2020Document17 pagesA3 Projet CVC Revit ARCHI MEP 2020ARHAB YOUCEFPas encore d'évaluation
- Guide Prescription FacadesDocument65 pagesGuide Prescription FacadesJP FabrePas encore d'évaluation
- TD1 SedspDocument8 pagesTD1 SedspAmeni RezguiPas encore d'évaluation
- A47202 Idoc - Pub - Catalogue-Corderie-Dor-2011-Documentations1Document29 pagesA47202 Idoc - Pub - Catalogue-Corderie-Dor-2011-Documentations1seifPas encore d'évaluation
- MemoiremasterMouad BelattarDocument8 pagesMemoiremasterMouad BelattarsamiraPas encore d'évaluation
- TravauxPratiques Access 2017 2018Document11 pagesTravauxPratiques Access 2017 2018Achraf SabbarPas encore d'évaluation
- Techniques de Compression D'images.Document2 pagesTechniques de Compression D'images.oiseaubleu100% (1)
- Cours Moteur OualiDocument26 pagesCours Moteur OualiamelPas encore d'évaluation
- Proposition PFE Et Master PM 2021 2022Document1 pageProposition PFE Et Master PM 2021 2022imenePas encore d'évaluation
- Bilan Carbone Linde France Décembre 2012201 - 84508Document9 pagesBilan Carbone Linde France Décembre 2012201 - 84508dalila AMMARPas encore d'évaluation
- Travaux D Thermodynamique - TextmarkDocument7 pagesTravaux D Thermodynamique - TextmarkMohidi MohidiPas encore d'évaluation
- SNA17048Document6 pagesSNA17048Mohamed Tahar BoussahaPas encore d'évaluation
- Cours 5fDocument7 pagesCours 5fcdtapusiPas encore d'évaluation
- These AmimeurDocument127 pagesThese AmimeurAbd Errahim ReffasPas encore d'évaluation
- BriqueDocument16 pagesBriqueMoutie0% (1)
- Leaflet Schnell HomeDocument2 pagesLeaflet Schnell HomeRajiv SingalPas encore d'évaluation
- Introduction GénéraleDocument8 pagesIntroduction GénéraleFatma BenbrahimPas encore d'évaluation
- Feuillet I Amarrage D Un Echafaudage Avec Ou Sans Toile Ou Filet I 2020 1 VoletDocument2 pagesFeuillet I Amarrage D Un Echafaudage Avec Ou Sans Toile Ou Filet I 2020 1 Voletsam hadPas encore d'évaluation
- Bosch JlkgfrgefelöDocument610 pagesBosch Jlkgfrgefelöhati_nPas encore d'évaluation
- Analytique smp5 PDFDocument72 pagesAnalytique smp5 PDFMustapha LarajPas encore d'évaluation
- Rapport de StageDocument7 pagesRapport de StageMohamed Yassine LahianiPas encore d'évaluation
- TD PFS Siege de CabinetDocument8 pagesTD PFS Siege de CabinetThibaudPas encore d'évaluation
- Sika Carbodur SDocument4 pagesSika Carbodur Sjorncloud18Pas encore d'évaluation
- Caractérisation Et Stabilisation de Quelques Sols Gonflants D'algérieDocument15 pagesCaractérisation Et Stabilisation de Quelques Sols Gonflants D'algérieChaker Mohamed RamziPas encore d'évaluation
- Contenu D'un Dossier ConstructeurDocument1 pageContenu D'un Dossier ConstructeurHassene KARMOUSPas encore d'évaluation
- Mecroscopie Infraroug (IR)Document75 pagesMecroscopie Infraroug (IR)Zakaria BknePas encore d'évaluation
- Chapitre 2 Extraction Liquide Liquide Les Notions de BaseDocument8 pagesChapitre 2 Extraction Liquide Liquide Les Notions de BaseAnesPas encore d'évaluation
- Multi VibraDocument11 pagesMulti VibramaddzioPas encore d'évaluation