Vous aimerez peut-être aussi
- Distribuer-Commande Par Modulation D'énergieDocument4 pagesDistribuer-Commande Par Modulation D'énergieBALLOUK Soufiane100% (1)
- TD 9 Chaîne de Séchage Peinture - UF3-M3Document7 pagesTD 9 Chaîne de Séchage Peinture - UF3-M3hamzaPas encore d'évaluation
- Gradateur Monophasé Et TriphaséDocument6 pagesGradateur Monophasé Et TriphaséAurelien Christ L'angePas encore d'évaluation
- Cours Commandes MachinesDocument33 pagesCours Commandes Machineseya behriPas encore d'évaluation
- Cours CMEDocument39 pagesCours CMEHaidra HaidraPas encore d'évaluation
- Modulation D EnergieDocument7 pagesModulation D EnergieAurelien Christ L'angePas encore d'évaluation
- Fonction Distribuer Variateurs de Vitesse Industriels CoursDocument3 pagesFonction Distribuer Variateurs de Vitesse Industriels CoursTp LinkPas encore d'évaluation
- CH1 Introduction A La Commande Des Machines Electriques A Courant ContinuDocument65 pagesCH1 Introduction A La Commande Des Machines Electriques A Courant ContinumarPas encore d'évaluation
- Chapitre 1 - 1Document58 pagesChapitre 1 - 1Mourad RachchagPas encore d'évaluation
- La Variation de VitesseDocument6 pagesLa Variation de Vitessenajim68Pas encore d'évaluation
- 3 Variation de Vitesse MasDocument6 pages3 Variation de Vitesse MasBen Saber RahiimPas encore d'évaluation
- Moteurs Spéciaux Dahlander...Document15 pagesMoteurs Spéciaux Dahlander...Yahya AidaraPas encore d'évaluation
- Onduleur A MLIDocument50 pagesOnduleur A MLIAbdesslam GuennouniPas encore d'évaluation
- Chap1la Variation de Vitesse-2Document6 pagesChap1la Variation de Vitesse-2مفتاح الدينPas encore d'évaluation
- Document Variateur de VitesseDocument10 pagesDocument Variateur de VitesseMohamed FETTAHPas encore d'évaluation
- Convertisseurs de LElectronique de PuissDocument33 pagesConvertisseurs de LElectronique de Puissfarid saadPas encore d'évaluation
- Chapitre 1 EPDocument24 pagesChapitre 1 EPAbdelhamid BouremmaPas encore d'évaluation
- Inverter VariateurDocument34 pagesInverter VariateurÉlément InstablePas encore d'évaluation
- Cours de RemediationDocument43 pagesCours de RemediationKevin ObiangPas encore d'évaluation
- Variateur de VitesseDocument10 pagesVariateur de VitesseKossayEssidPas encore d'évaluation
- Chapitre 4 Protection Des TransformateursDocument14 pagesChapitre 4 Protection Des TransformateursFayçal LouahalaPas encore d'évaluation
- Chapitre3 VariateursDocument15 pagesChapitre3 VariateursKAOUTAR ELALAMIPas encore d'évaluation
- Chapitre 5 Les Variateurs de VitesseDocument10 pagesChapitre 5 Les Variateurs de Vitessedallagi mohamedPas encore d'évaluation
- Chapitre 2Document33 pagesChapitre 2الحمدللهPas encore d'évaluation
- VARIATEUR - DE - VITESSE - Doc ProfDocument3 pagesVARIATEUR - DE - VITESSE - Doc Profsaid100% (2)
- Distribuer Variateurs de Vitesse Industriels 2 Bac Science Dingenieur PDFDocument3 pagesDistribuer Variateurs de Vitesse Industriels 2 Bac Science Dingenieur PDFayoumaaoui5Pas encore d'évaluation
- Chapitre II Hacheur SérieDocument8 pagesChapitre II Hacheur SérieAmIne OmdaPas encore d'évaluation
- SoutenanceDocument13 pagesSoutenancenassimaPas encore d'évaluation
- Chapitre 1Document5 pagesChapitre 1Eya CherbibPas encore d'évaluation
- MLIDocument10 pagesMLIHamza A.djaballahPas encore d'évaluation
- VARIATEURDocument5 pagesVARIATEURAbderrazak MiassarPas encore d'évaluation
- 5.cours MCCDocument29 pages5.cours MCCmajdoubPas encore d'évaluation
- 6 Choix Contacteur PDFDocument3 pages6 Choix Contacteur PDFBhl ZarroukPas encore d'évaluation
- 6 Choix Contacteur PDFDocument3 pages6 Choix Contacteur PDFIkeoPas encore d'évaluation
- Choix de Contacteur PDFDocument3 pagesChoix de Contacteur PDFEl Haj Benazzouz100% (1)
- 6 Choix Contacteur PDFDocument3 pages6 Choix Contacteur PDFB medPas encore d'évaluation
- 6 Choix Contacteur PDFDocument3 pages6 Choix Contacteur PDFBouzou Samaila Dit PhiloPas encore d'évaluation
- ContacteurDocument3 pagesContacteurAnonymous 6VBmiJQ7MPas encore d'évaluation
- 6 Choix ContacteurDocument3 pages6 Choix ContacteurMustapha ElhajjajiPas encore d'évaluation
- 6 Choix ContacteurDocument3 pages6 Choix ContacteurNanema MadiPas encore d'évaluation
- Variation de Vitesse Des Moteurs Courant ContinuDocument18 pagesVariation de Vitesse Des Moteurs Courant ContinuPatrick DelsolPas encore d'évaluation
- Variation de Vitesse Des Moteurs CourantDocument18 pagesVariation de Vitesse Des Moteurs CourantckrimyouPas encore d'évaluation
- Chaine D'action ÉlectriqueDocument34 pagesChaine D'action ÉlectriqueBodelvi KayiPas encore d'évaluation
- Cours Commande Des MachinesDocument40 pagesCours Commande Des MachinesyaoPas encore d'évaluation
- Rapport de PFEDocument18 pagesRapport de PFEHassan Ben BoukdirPas encore d'évaluation
- Electrotechnique EEA TP7 SujetDocument7 pagesElectrotechnique EEA TP7 SujetSalmeMeztouPas encore d'évaluation
- Chapitre 1Document71 pagesChapitre 1Rida FargaliPas encore d'évaluation
- Les OnduleursDocument65 pagesLes Onduleurssadok kerkeni100% (1)
- Chap - 2 - Le Régime de Fonctionnement Des Moteurs ÉlectriquesDocument5 pagesChap - 2 - Le Régime de Fonctionnement Des Moteurs Électriqueskhaled100% (1)
- Chp1 Variateur de Vitesse PDFDocument10 pagesChp1 Variateur de Vitesse PDFJamila DebayaPas encore d'évaluation
- Conversion de L'énergie Cours BEPDocument11 pagesConversion de L'énergie Cours BEPAdam CustosPas encore d'évaluation
- Chap1 Generalites Sur Les Entrainements ElectriquesDocument4 pagesChap1 Generalites Sur Les Entrainements ElectriquesSalah PanikaPas encore d'évaluation
- TP VV Ei3 2023Document39 pagesTP VV Ei3 2023Omayma BoukatayaPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Exercice D'applicationDocument2 pagesExercice D'applicationboufakri abdelmounaimPas encore d'évaluation
- Moteurs Pas A PasDocument5 pagesMoteurs Pas A Pasboufakri abdelmounaimPas encore d'évaluation
- RDM CoursDocument18 pagesRDM CoursMounaim MatiniPas encore d'évaluation
- Réseau NaDocument25 pagesRéseau Nafouad100% (1)
- Tian Yang DLEDocument122 pagesTian Yang DLEboufakri abdelmounaimPas encore d'évaluation
- Exercice 2Document8 pagesExercice 2boufakri abdelmounaimPas encore d'évaluation
- Exercice D'applicationDocument4 pagesExercice D'applicationboufakri abdelmounaimPas encore d'évaluation
- Series Obs NLDocument2 pagesSeries Obs NLOthman NchifaPas encore d'évaluation
- Exercice D'applicationDocument4 pagesExercice D'applicationboufakri abdelmounaimPas encore d'évaluation
- tp1 - DSP Travail de Boufakri AbdelmounaimDocument9 pagestp1 - DSP Travail de Boufakri Abdelmounaimboufakri abdelmounaimPas encore d'évaluation
- EPchap 4 EpuDocument16 pagesEPchap 4 Epuboufakri abdelmounaimPas encore d'évaluation
- El201 TD1Document5 pagesEl201 TD1boufakri abdelmounaimPas encore d'évaluation
- Cours Rli v2 PDFDocument16 pagesCours Rli v2 PDFnimarPas encore d'évaluation
- Introduction Aux Réseaux Locaux IndustrielsDocument12 pagesIntroduction Aux Réseaux Locaux Industrielsadyady1Pas encore d'évaluation
- Ch3 Systemes Sequentiels GrafcetDocument24 pagesCh3 Systemes Sequentiels GrafcetAnas TounsiPas encore d'évaluation
- Home WorkDocument2 pagesHome Workboufakri abdelmounaimPas encore d'évaluation
- Le Grafcet - Bon PDFDocument59 pagesLe Grafcet - Bon PDFenerfirePas encore d'évaluation
- Réglage Par Mode de Glissement D'un Moteur A SynchroneDocument78 pagesRéglage Par Mode de Glissement D'un Moteur A Synchroneboufakri abdelmounaimPas encore d'évaluation
- Choix DisjDocument11 pagesChoix Disjboufakri abdelmounaimPas encore d'évaluation
- 07 Poly FractionsDocument8 pages07 Poly FractionsYoussef ELPas encore d'évaluation
- S3 - Algebre I (Polycopie Des Exercices)Document121 pagesS3 - Algebre I (Polycopie Des Exercices)Daaray Cheikhoul XadimPas encore d'évaluation
- 01 Resume TSTI SinusoidalDocument3 pages01 Resume TSTI Sinusoidalboufakri abdelmounaimPas encore d'évaluation
- P Et MuC Une IntroductionDocument63 pagesP Et MuC Une Introductionboufakri abdelmounaimPas encore d'évaluation
- P Et MuC Une IntroductionDocument63 pagesP Et MuC Une Introductionboufakri abdelmounaimPas encore d'évaluation
- Transport Distribution Energie ElectriqueDocument55 pagesTransport Distribution Energie ElectriqueYoucef MallekPas encore d'évaluation
- Sys Up Chap IDocument14 pagesSys Up Chap IAbderrahmane WrPas encore d'évaluation
- Travaux Diriges PDFDocument19 pagesTravaux Diriges PDFsoubeylou FALLPas encore d'évaluation
- Structure Livraison PDFDocument22 pagesStructure Livraison PDFAfef NejiPas encore d'évaluation
- Cours Electronique Puissance PDFDocument147 pagesCours Electronique Puissance PDFAlix BoubanPas encore d'évaluation
- Statique FrottementDocument33 pagesStatique FrottementŒū Ssa MēPas encore d'évaluation
- TD1 MISP2 ThermodynamiqueDocument2 pagesTD1 MISP2 ThermodynamiqueYRO AUBAINPas encore d'évaluation
- Controle Métaux PDFDocument15 pagesControle Métaux PDFfatimazahra kheraziPas encore d'évaluation
- RAt-DDS 2015 PDFDocument1 pageRAt-DDS 2015 PDFaaerPas encore d'évaluation
- 5-1boite de Cisaillement PDFDocument4 pages5-1boite de Cisaillement PDFUomoD'AffariPas encore d'évaluation
- Principe de TournageDocument5 pagesPrincipe de TournageAchraf AitPas encore d'évaluation
- Réglage Du Jeu Des Soupapes Sur Pajero DiD 3200 (4M41)Document9 pagesRéglage Du Jeu Des Soupapes Sur Pajero DiD 3200 (4M41)Maroselli CharlesPas encore d'évaluation
- Pipe SizingDocument4 pagesPipe SizingmarwitosPas encore d'évaluation
- Piezo Common Rail PCR 2 DV4TD Ford (001 097)Document97 pagesPiezo Common Rail PCR 2 DV4TD Ford (001 097)Luc Mutombo MukuluPas encore d'évaluation
- Amelioration Du Systeme de Freinage de Parking Des Portiques ZPMC de Benin TerminalDocument149 pagesAmelioration Du Systeme de Freinage de Parking Des Portiques ZPMC de Benin TerminalFerrody ChetanPas encore d'évaluation
- Ex 21 1 Boule de Billard Sur Table TournanteDocument5 pagesEx 21 1 Boule de Billard Sur Table TournanteDIBIPas encore d'évaluation
- M13-Etude Coffrage Ferraillage Éléments porteur-BTP-TDBDocument71 pagesM13-Etude Coffrage Ferraillage Éléments porteur-BTP-TDBDriss Benomar100% (13)
- TMF Corrigé TD Tuyère Et AubeDocument6 pagesTMF Corrigé TD Tuyère Et AubeAnonymous 80p9OVPas encore d'évaluation
- Sécurité Sur Les Convoyeurs À Courroie PDFDocument85 pagesSécurité Sur Les Convoyeurs À Courroie PDFChristophe Schwartz100% (1)
- Mathieu Le Nel 33359 Kergourlay Le-Nel Pince-Hgw Notice-CalculDocument15 pagesMathieu Le Nel 33359 Kergourlay Le-Nel Pince-Hgw Notice-CalculMouhsineAtbPas encore d'évaluation
- Manuel 300 Tei 2020Document176 pagesManuel 300 Tei 2020pierre lathierePas encore d'évaluation
- PiquageDocument4 pagesPiquagefanfan.boreauPas encore d'évaluation
- Résistance Des Structures - 20230109Document190 pagesRésistance Des Structures - 20230109arcPas encore d'évaluation
- Etude Expérimentale en Vue D'un Modèle de Comportement Pour La Vase de TunisDocument12 pagesEtude Expérimentale en Vue D'un Modèle de Comportement Pour La Vase de TunisGeotech NicalPas encore d'évaluation
- IntroductionDocument5 pagesIntroductionBenabed AekPas encore d'évaluation
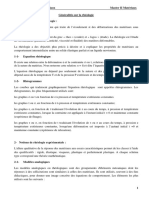
- Généralités Sur La RhéologieDocument5 pagesGénéralités Sur La Rhéologiezoom scaipPas encore d'évaluation
- AzziSmail AzziBDocument69 pagesAzziSmail AzziBOubachir Mi DouPas encore d'évaluation
- Poussoir HydrauliqueDocument6 pagesPoussoir HydrauliqueFosseni DialloPas encore d'évaluation
- CHAUDIERE Codes Defauts Basse Temprature Saunier DuvalDocument12 pagesCHAUDIERE Codes Defauts Basse Temprature Saunier DuvalFaguilarPas encore d'évaluation
- 01-EC225 LP - ATA 00 - Premier Contact Avec L'hélicoptère - T1 - FRDocument44 pages01-EC225 LP - ATA 00 - Premier Contact Avec L'hélicoptère - T1 - FRLung KhanPas encore d'évaluation
- NF EN 13480-4 AC2 Tuyauterie Industrielle Métallique Fabrication Et InstallationDocument6 pagesNF EN 13480-4 AC2 Tuyauterie Industrielle Métallique Fabrication Et InstallationaminePas encore d'évaluation
- Support de Cours DYNAMIQUE CopieDocument14 pagesSupport de Cours DYNAMIQUE CopieDjeti LabantePas encore d'évaluation
- Rapport PFE FinalDocument87 pagesRapport PFE Finalmoez ben youssef100% (1)
- LES COURROIES 1 (1) - Lecture SeuleDocument20 pagesLES COURROIES 1 (1) - Lecture SeuleSaid CheikhPas encore d'évaluation
- Généralités: Selon ISO 724Document3 pagesGénéralités: Selon ISO 724M.Khaled GdouraPas encore d'évaluation