Vous aimerez peut-être aussi
- S89 Cours Propulsion RENDEMENT Hélice PDFDocument5 pagesS89 Cours Propulsion RENDEMENT Hélice PDFLustroPas encore d'évaluation
- Appareil A GouvernerDocument12 pagesAppareil A GouvernerAmir Na Dz100% (2)
- L'Interaction D U Propulseur E T D E La Carene Et Soneffet Sur Les Vibrations de Torsion D E La Ligne D'Arbres. Par M. G. AerïssenDocument33 pagesL'Interaction D U Propulseur E T D E La Carene Et Soneffet Sur Les Vibrations de Torsion D E La Ligne D'Arbres. Par M. G. AerïssenMed Amine RessadPas encore d'évaluation
- Le Dispositif de DirectionDocument8 pagesLe Dispositif de DirectionHerve ArvinPas encore d'évaluation
- Rapport Machine HydrauliqueDocument10 pagesRapport Machine HydrauliqueMohammed MamdouhPas encore d'évaluation
- IntroductionDocument5 pagesIntroductionHä NaâPas encore d'évaluation
- Manoeuvres Au MoteurDocument29 pagesManoeuvres Au Moteurboujnite100% (1)
- Propulsion Elec 2 PDFDocument11 pagesPropulsion Elec 2 PDFZakaria El HalouiPas encore d'évaluation
- Turbine Hydraulq PDFDocument27 pagesTurbine Hydraulq PDFMimouni Mohamed100% (3)
- Construction Des turbomachines-WPS OfficeDocument10 pagesConstruction Des turbomachines-WPS OfficeIBrahim BenamaraPas encore d'évaluation
- Turbine PeltonDocument8 pagesTurbine PeltonLEBONGO100% (1)
- Chapitre 4 - Les Turbines HydrauliquesDocument6 pagesChapitre 4 - Les Turbines Hydrauliquestem tallPas encore d'évaluation
- App A GouvernerDocument63 pagesApp A GouvernerAkram SaidiaPas encore d'évaluation
- Technique - Le VilebrequinDocument9 pagesTechnique - Le Vilebrequinkadisam515Pas encore d'évaluation
- Moteur Pap M Mento Ok v0.1Document27 pagesMoteur Pap M Mento Ok v0.1Sylvain NomenjanaharyPas encore d'évaluation
- Servomoteur - WikipédiaDocument9 pagesServomoteur - WikipédiashtaiguenPas encore d'évaluation
- Propulsion AeronautiqueDocument19 pagesPropulsion Aeronautiqueromy94496Pas encore d'évaluation
- 1Document13 pages1HãŸę ŤëmPas encore d'évaluation
- Différent Type de Moteur Utilisé A Bord-ConvertiDocument4 pagesDifférent Type de Moteur Utilisé A Bord-Convertiabdelghani benhamoudaPas encore d'évaluation
- Cours Systèmes Propulsifs 4Document3 pagesCours Systèmes Propulsifs 4hamzaPas encore d'évaluation
- Cours InertieDocument13 pagesCours Inertiemohamed btmPas encore d'évaluation
- Turbomachines CM Master2-ConvertiDocument8 pagesTurbomachines CM Master2-ConvertiAicha DahmaniPas encore d'évaluation
- TP ResistanceDocument11 pagesTP ResistancehamzaPas encore d'évaluation
- Turbin PeltonDocument7 pagesTurbin PeltonMohammed ALMUSHIAAPas encore d'évaluation
- TPFLUIDEDocument7 pagesTPFLUIDEAchraf SarhanPas encore d'évaluation
- HeliceDocument18 pagesHeliceM-di El-riPas encore d'évaluation
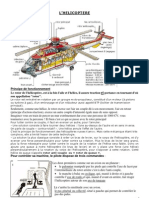
- FFH Comment CA Marche HelicoDocument16 pagesFFH Comment CA Marche HelicoESA gmPas encore d'évaluation
- 1 - Variation de Vitesse de MAS - ElèveDocument7 pages1 - Variation de Vitesse de MAS - ElèveLakhlifi AyoubPas encore d'évaluation
- Inj Directe Bosch MED17.4Document85 pagesInj Directe Bosch MED17.4qw2jcz45pkPas encore d'évaluation
- Turbo Compresseurs & Turbo CompoundDocument16 pagesTurbo Compresseurs & Turbo CompoundSofiane Halimi100% (3)
- PLP 2011 Electrotech 1 CorrigeDocument45 pagesPLP 2011 Electrotech 1 CorrigeslomczynskiPas encore d'évaluation
- Chapitre 5 Turbines A Vapeur 2020 2Document38 pagesChapitre 5 Turbines A Vapeur 2020 2la découverte du mondePas encore d'évaluation
- Embrayage HydrocinetiqueDocument6 pagesEmbrayage HydrocinetiqueAmine MerwarPas encore d'évaluation
- HelicoDocument6 pagesHelicoYoussef NourelainePas encore d'évaluation
- HeliceDocument15 pagesHelicelinalimaPas encore d'évaluation
- Résumé FR PDFDocument6 pagesRésumé FR PDFKaouachi Ahmed LouayPas encore d'évaluation
- M2ELM-chapitre II-Turbine À Vapeur À ActionDocument30 pagesM2ELM-chapitre II-Turbine À Vapeur À ActionJelly GiroudPas encore d'évaluation
- Turbocompresseur PDFDocument2 pagesTurbocompresseur PDFmecanosimo100% (2)
- Zabariu 2Document12 pagesZabariu 2Ahmed Amine BekkouchePas encore d'évaluation
- Cours Aéronautique Partie4Document8 pagesCours Aéronautique Partie4Fatima FatimaPas encore d'évaluation
- Comment Vole Un HelicoptereDocument4 pagesComment Vole Un HelicopterejbouguechalPas encore d'évaluation
- Power Shift Twin Disc PDFDocument13 pagesPower Shift Twin Disc PDFakiPas encore d'évaluation
- Expose Mte Groupe 16Document42 pagesExpose Mte Groupe 16Gaël KabPas encore d'évaluation
- Aubes TurboMDocument18 pagesAubes TurboMM DouniaPas encore d'évaluation
- Windvane Report: Régulateurs d'allure, un voyage à travers le tempsD'EverandWindvane Report: Régulateurs d'allure, un voyage à travers le tempsPas encore d'évaluation
- GrueDocument12 pagesGrue2MarshPas encore d'évaluation
- Turbines À GazDocument8 pagesTurbines À GazAladin ZeribiPas encore d'évaluation
- L3 Turbomachine1 Chap4Document9 pagesL3 Turbomachine1 Chap4Hocine IKkACHEPas encore d'évaluation
- Freinage Des Machines AsynchronesDocument8 pagesFreinage Des Machines AsynchronesMaystro AbdoPas encore d'évaluation
- Ligne D'arbre FRDocument5 pagesLigne D'arbre FRRiadh Chouaibi100% (1)
- Demarage Protection Moteurs Haute TensionDocument28 pagesDemarage Protection Moteurs Haute TensionYounes KerchaouiPas encore d'évaluation
- 1 - Variation de Vitesse de MASDocument7 pages1 - Variation de Vitesse de MASsouheil khalifaPas encore d'évaluation
- Turbomachine ExposéDocument4 pagesTurbomachine ExposéNouha AbdessamedPas encore d'évaluation
- Chimie - TP 02 - Rendre Claire Une Eau BoueuseDocument3 pagesChimie - TP 02 - Rendre Claire Une Eau Boueusesb aliPas encore d'évaluation
- Attinage PositionnableDocument10 pagesAttinage PositionnableUnica Figlia KenzaPas encore d'évaluation
- Nouveau manuel complet de marine seconde partie: manoeuvresD'EverandNouveau manuel complet de marine seconde partie: manoeuvresPas encore d'évaluation
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- Comment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesD'EverandComment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesÉvaluation : 2 sur 5 étoiles2/5 (1)
- TIS questions and answers frDocument8 pagesTIS questions and answers frHerve ArvinPas encore d'évaluation
- DESSINDocument1 pageDESSINHerve ArvinPas encore d'évaluation
- Formation de Base A La SecuriteDocument11 pagesFormation de Base A La SecuriteHerve ArvinPas encore d'évaluation
- PROGRAMME DE DESSIN TECHNIQUE 3 ANNEEDocument2 pagesPROGRAMME DE DESSIN TECHNIQUE 3 ANNEEHerve ArvinPas encore d'évaluation
- Fiche de Reservation de NavireDocument3 pagesFiche de Reservation de NavireHerve ArvinPas encore d'évaluation
- Équipements de SauvetageDocument6 pagesÉquipements de SauvetageHerve ArvinPas encore d'évaluation
- Architecture Des NaviresDocument3 pagesArchitecture Des NaviresHerve ArvinPas encore d'évaluation
- Formation de Base A La SecuriteDocument11 pagesFormation de Base A La SecuriteHerve ArvinPas encore d'évaluation
- Tis RuDocument102 pagesTis RuHerve ArvinPas encore d'évaluation
- Appareil Appui SETRA2000Document4 pagesAppareil Appui SETRA2000Mohamed BayoudhPas encore d'évaluation
- Memento Conducteur SDIS 14 - BPPTDocument51 pagesMemento Conducteur SDIS 14 - BPPTbenarousPas encore d'évaluation
- Chapitre 4 RDMDocument14 pagesChapitre 4 RDMRABIE BENTAIEBPas encore d'évaluation
- Produits Sidérurgiques de Première Transformation-FormulaireDocument25 pagesProduits Sidérurgiques de Première Transformation-FormulaireMohamed OmarPas encore d'évaluation
- ThermoDocument4 pagesThermoAntes de Partir, A.C.Pas encore d'évaluation
- Equipements CR MetalDocument4 pagesEquipements CR MetalagustinPas encore d'évaluation
- SWE100-120-L-S-140-L-200D Staxio - 258946 13-10-01Document272 pagesSWE100-120-L-S-140-L-200D Staxio - 258946 13-10-01Анатолій Корнейчук86% (7)
- Kubota B4200 ManuelDocument44 pagesKubota B4200 ManuelValentín Pérez GuédezPas encore d'évaluation
- Entretenir Et Réparer Sa Voiture Soi-Même Paul Brand Traduction Monique LaoudiDocument14 pagesEntretenir Et Réparer Sa Voiture Soi-Même Paul Brand Traduction Monique LaoudiLahouari FatahPas encore d'évaluation
- 8c6rd-Etau de Plombier PDFDocument4 pages8c6rd-Etau de Plombier PDFbecem67% (6)
- Cours Thermo Appliquee 2023Document326 pagesCours Thermo Appliquee 2023Michel NsangoPas encore d'évaluation
- GCI-200 Enonce L2Document10 pagesGCI-200 Enonce L2GBA65Pas encore d'évaluation
- Serie 1100Document7 pagesSerie 1100Belghennou Hadj AliPas encore d'évaluation
- Exam Ratt Forge 18 MinDocument2 pagesExam Ratt Forge 18 Minfsd vxxsPas encore d'évaluation
- Cours Materiaux CompositesDocument7 pagesCours Materiaux Compositesenatt201267% (3)
- 15 Article Boutina Lyes B15Document4 pages15 Article Boutina Lyes B15Serge KewouPas encore d'évaluation
- ERM ExerciceDocument10 pagesERM Exercicebarg lilPas encore d'évaluation
- L1SIPC Meca TD PDFDocument61 pagesL1SIPC Meca TD PDFAyman Hamza50% (2)
- rtk5704 701022454Document5 pagesrtk5704 701022454Juan Carlos GutierrezPas encore d'évaluation
- La Golf 2013 Systèmes D'aide À La ConduiteDocument32 pagesLa Golf 2013 Systèmes D'aide À La Conduitegheorghe2Pas encore d'évaluation
- Coiled TubingDocument23 pagesCoiled TubinggasmigasmiPas encore d'évaluation
- Hyundai I10Document16 pagesHyundai I10nsdbusterPas encore d'évaluation
- Calorimetrie Et TravailDocument3 pagesCalorimetrie Et Travailkonrmj.218Pas encore d'évaluation
- Presentation AmdecDocument26 pagesPresentation Amdectartak12Pas encore d'évaluation
- Aquasnap 30RB / 30RQ 30RBY / 30RQY: Pro-Dialog +Document23 pagesAquasnap 30RB / 30RQ 30RBY / 30RQY: Pro-Dialog +Assia Oumou MohamedPas encore d'évaluation
- Plasticité en Mise en Forme: Métaux À FroidDocument17 pagesPlasticité en Mise en Forme: Métaux À FroidMohamed LaliouiPas encore d'évaluation
- 7 - Réseaux de DistributionDocument24 pages7 - Réseaux de DistributionHanan BenhmaidaPas encore d'évaluation
- Sequentiel ExosDocument20 pagesSequentiel ExosChava TututiPas encore d'évaluation
- 3.2 Technical Maintenance of 4cyl - Mercer - Engine and Its Parts - FR - R3Document51 pages3.2 Technical Maintenance of 4cyl - Mercer - Engine and Its Parts - FR - R3Dragoslav MiloševićPas encore d'évaluation
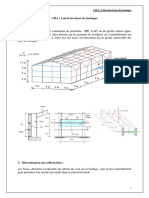
- CH.4 - Calcul Des Lisses de BardagesDocument5 pagesCH.4 - Calcul Des Lisses de BardagesDounia TiPas encore d'évaluation