Vous aimerez peut-être aussi
- 1 Résumés de Cours de Physique-Chimie, 2BAC BIOFDocument47 pages1 Résumés de Cours de Physique-Chimie, 2BAC BIOFSalma Za100% (5)
- Modélisation Des Plaques Par La Méthode Des Éléments Finis PDFDocument155 pagesModélisation Des Plaques Par La Méthode Des Éléments Finis PDFAthanase Mekie0% (1)
- Chap 3Document37 pagesChap 3Yassine TouhamiPas encore d'évaluation
- Polycopie DDSDocument115 pagesPolycopie DDSBoss Mohamed100% (8)
- D2 4 VO (4) Ondes Intro PDFDocument20 pagesD2 4 VO (4) Ondes Intro PDFBoudjema SoudedPas encore d'évaluation
- Ultrasons 170322104531Document11 pagesUltrasons 170322104531rezokaPas encore d'évaluation
- Hammal Chap 3 (Modèle Atomique)Document113 pagesHammal Chap 3 (Modèle Atomique)Zch56Pas encore d'évaluation
- Contr Le Par UltrasonsDocument11 pagesContr Le Par UltrasonsfoufouPas encore d'évaluation
- Ultra SonsDocument33 pagesUltra Sonssaraswe56% (9)
- CND Chapitre 4Document34 pagesCND Chapitre 4Firas Ben azizaPas encore d'évaluation
- Ultrasons 21Document11 pagesUltrasons 21Anouar Alaa-Eddine BenaïdaPas encore d'évaluation
- VibrationDocument59 pagesVibrationmahmoudmain_24273317Pas encore d'évaluation
- Ondes Radios - CefiveDocument88 pagesOndes Radios - CefiveGÉRY ADÉLARD ASSEUPas encore d'évaluation
- Chapitre 1 - Ondes Mécaniques ProgressivesDocument7 pagesChapitre 1 - Ondes Mécaniques ProgressivesKais Ben AichaPas encore d'évaluation
- Chapitre 6 CND Par UltrasonsDocument60 pagesChapitre 6 CND Par UltrasonshasagiPas encore d'évaluation
- 01 - Phenomenes OndulatoiresDocument9 pages01 - Phenomenes Ondulatoiressisics2005Pas encore d'évaluation
- TP 1 Ondes Mecanique A Polarisation LineaireDocument6 pagesTP 1 Ondes Mecanique A Polarisation Lineairemalikghani841Pas encore d'évaluation
- 001 UT PAUT Présentation PDFDocument45 pages001 UT PAUT Présentation PDFgueridiPas encore d'évaluation
- Longueur D'onde - WikipédiaDocument9 pagesLongueur D'onde - WikipédiaDes PamelaPas encore d'évaluation
- Chapitre 1 Ondes MecaniquesDocument8 pagesChapitre 1 Ondes Mecaniquesdevdaz034Pas encore d'évaluation
- Les Ondes Mécanique Progressives TestDocument5 pagesLes Ondes Mécanique Progressives TestmohamedPas encore d'évaluation
- Les Ondes Et ParticulesDocument7 pagesLes Ondes Et ParticulesSoleil90Pas encore d'évaluation
- Cours Ondes Mécaniques ProgressivesDocument3 pagesCours Ondes Mécaniques ProgressivesMohamed HammouchPas encore d'évaluation
- Cours Ondes Mécaniques ProgressivesDocument3 pagesCours Ondes Mécaniques ProgressivesYoussef ElkhalfaouiPas encore d'évaluation
- Chapitre 1, Ondes Mécaniques Progressives, Cours, Activités, Exercices D'application, 2BAC BIOF, SM, PC Et SVT Prof JENKAL RACHIDDocument7 pagesChapitre 1, Ondes Mécaniques Progressives, Cours, Activités, Exercices D'application, 2BAC BIOF, SM, PC Et SVT Prof JENKAL RACHIDhilaPas encore d'évaluation
- 01 - Phénomènes OndulatoiresDocument18 pages01 - Phénomènes OndulatoiresNourhan BouchnafaPas encore d'évaluation
- CND 2022 UltrasonsDocument24 pagesCND 2022 UltrasonsAhmed RACHDIPas encore d'évaluation
- Les Ondes Mécaniques ProgressivesDocument9 pagesLes Ondes Mécaniques ProgressivesSohaib LaminePas encore d'évaluation
- CHAPIIIDocument52 pagesCHAPIIIriyan raisPas encore d'évaluation
- TP &Document18 pagesTP &Nour Hindouz86% (7)
- 4M Et SC Cours OndesDocument19 pages4M Et SC Cours Ondeschaymaben598Pas encore d'évaluation
- 2-Les Ondes Mécaniques ProgressivesDocument7 pages2-Les Ondes Mécaniques ProgressivesKawtar kawtarPas encore d'évaluation
- ch2 Caracteristiques Des Ondes ElDocument6 pagesch2 Caracteristiques Des Ondes ElbonnegustavePas encore d'évaluation
- Résumés de Cours de Physique-Chimie, 2BAC BIOFDocument46 pagesRésumés de Cours de Physique-Chimie, 2BAC BIOFAnaya0% (1)
- Ondes Mécaniques Progressives PDFDocument4 pagesOndes Mécaniques Progressives PDFAzizElheni100% (2)
- 1re Physique Chimie Modeles Ondulatoire Et Particulaire de La LumiereDocument5 pages1re Physique Chimie Modeles Ondulatoire Et Particulaire de La LumiereNour El Houda SlamaPas encore d'évaluation
- 1cours Antennes Rayonnement Patie1Document37 pages1cours Antennes Rayonnement Patie1Reda MouffokPas encore d'évaluation
- PhysiqueXXI TomeC Section 1.8Document10 pagesPhysiqueXXI TomeC Section 1.8Walid aghazafiPas encore d'évaluation
- Pebay Peyroula Eva p04Document28 pagesPebay Peyroula Eva p04Hossam BendaliPas encore d'évaluation
- Une Onde ÉlectromagnétiqueDocument3 pagesUne Onde ÉlectromagnétiqueFayçal SerePas encore d'évaluation
- Ultra SonDocument99 pagesUltra Sonilyes3k2167% (3)
- Acoustique, Chapitre 2Document586 pagesAcoustique, Chapitre 2Ali KHALFAPas encore d'évaluation
- Télécommunications II-70Document70 pagesTélécommunications II-70Kanhirè KounzinaPas encore d'évaluation
- PC 2bac Sma SMB SPC Seance 1 Les Ondes Mecaniques ProgressivesDocument16 pagesPC 2bac Sma SMB SPC Seance 1 Les Ondes Mecaniques ProgressivesAbderrahim LakhdinePas encore d'évaluation
- Chap 05Document17 pagesChap 05Khadhra LassouedPas encore d'évaluation
- Salmi Mohamed 1Document216 pagesSalmi Mohamed 1Bahcin Ait OumgharPas encore d'évaluation
- Cours Optique CristallineDocument31 pagesCours Optique CristallineNada serine ZouanePas encore d'évaluation
- Les Ondes Au Service Des Sciences de La SanteDocument20 pagesLes Ondes Au Service Des Sciences de La SanteWilliana JeannotPas encore d'évaluation
- Physique 1 Les Ondes Mecaniques ProgressivesDocument6 pagesPhysique 1 Les Ondes Mecaniques ProgressivesChimie FinePas encore d'évaluation
- La Spectrophotomètrie InfrarougeDocument21 pagesLa Spectrophotomètrie Infrarougefellah aminaPas encore d'évaluation
- Chapitre 1 Ondes Mécaniques Progressives Cours Activités Exercices D'application 2BAC BIOF Réalisé Par Prof JENKAL RACHIDDocument7 pagesChapitre 1 Ondes Mécaniques Progressives Cours Activités Exercices D'application 2BAC BIOF Réalisé Par Prof JENKAL RACHIDMARRI MustaphaPas encore d'évaluation
- 7.phénomène D'interférences Des Ondes PDFDocument6 pages7.phénomène D'interférences Des Ondes PDFkimmikPas encore d'évaluation
- Chap 1 Propagation Des Ondes 1ère Partie (1) - 2021-12-25T142251.632Document8 pagesChap 1 Propagation Des Ondes 1ère Partie (1) - 2021-12-25T142251.632Mamadou lamine DiattaPas encore d'évaluation
- EXPOSE Sur Les Effets Des Ondes Electromagnétiques-1Document27 pagesEXPOSE Sur Les Effets Des Ondes Electromagnétiques-1Mazama-Esso Moddoh Ocloo100% (1)
- Geologie B (Groupe 2 - L2S4)Document10 pagesGeologie B (Groupe 2 - L2S4)Salif KouyatePas encore d'évaluation
- 1 S C2 BilanDocument2 pages1 S C2 BilaninscriptionPas encore d'évaluation
- ONDESDocument34 pagesONDESMarganice NgPas encore d'évaluation
- NOUHA RAMADAN DEVOIR PC Cours 2 - Les Ondes Mécaniques ProgressivesDocument4 pagesNOUHA RAMADAN DEVOIR PC Cours 2 - Les Ondes Mécaniques ProgressivesrihabPas encore d'évaluation
- Travaux Pratique de Controle Non DestrucDocument12 pagesTravaux Pratique de Controle Non DestrucHamza SmahriPas encore d'évaluation
- Ultrasons Par ContactDocument14 pagesUltrasons Par Contactbrahmi.aminePas encore d'évaluation
- Physique Micro-vibratoire et Forces InvisiblesD'EverandPhysique Micro-vibratoire et Forces InvisiblesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Fiche Resine 605Document2 pagesFiche Resine 605Fa TehPas encore d'évaluation
- Défauts de SoudureDocument38 pagesDéfauts de Souduremezyan reggaiPas encore d'évaluation
- TP 1 de SDMDocument6 pagesTP 1 de SDMFa Teh100% (1)
- Microscope Pour Des Échantillons ÉpaisDocument1 pageMicroscope Pour Des Échantillons ÉpaisFa TehPas encore d'évaluation
- TP Corrosion Et Protection Du Fer p108Document3 pagesTP Corrosion Et Protection Du Fer p108Fa TehPas encore d'évaluation
- CND Et EnjeuxDocument4 pagesCND Et EnjeuxFa TehPas encore d'évaluation
- Collage Des MatériauxDocument4 pagesCollage Des MatériauxAmmar BahijPas encore d'évaluation
- CorrosionmetauxferreuxDocument6 pagesCorrosionmetauxferreuxFa TehPas encore d'évaluation
- TP 2 de SDM (Les Aciers)Document5 pagesTP 2 de SDM (Les Aciers)Fa TehPas encore d'évaluation
- Thermch 5Document32 pagesThermch 5Fa Teh100% (2)
- 4) Taille DéfautsDocument12 pages4) Taille DéfautsFa TehPas encore d'évaluation
- Thermch 4Document34 pagesThermch 4Fa TehPas encore d'évaluation
- WireLine Memoire PDFDocument74 pagesWireLine Memoire PDFFa Teh100% (4)
- Thermch 1Document19 pagesThermch 1Fa TehPas encore d'évaluation
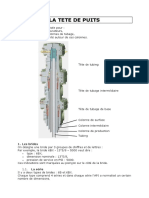
- La Tete de PuitsDocument12 pagesLa Tete de PuitsFa Teh100% (2)
- LINERDocument9 pagesLINERFa Teh100% (1)
- Wire Line 3Document72 pagesWire Line 3Fa Teh100% (1)
- Demande Intervention - PpsDocument14 pagesDemande Intervention - PpsFa TehPas encore d'évaluation
- Wire LineDocument25 pagesWire LineFa Teh100% (1)
- Cours CompositeDocument59 pagesCours CompositeYounes Kader100% (2)
- Classification de Section ApplicationsDocument8 pagesClassification de Section Applicationsboursas faridPas encore d'évaluation
- Série2 - Combinaisons D'actionsDocument2 pagesSérie2 - Combinaisons D'actionsRêda SlimiPas encore d'évaluation
- Construction Mixte Acier-Béton: SIA 264:2003 Bâtiment, Génie CivilDocument52 pagesConstruction Mixte Acier-Béton: SIA 264:2003 Bâtiment, Génie Civiljhksajhska100% (1)
- Memoire Fin D'etudeooDocument109 pagesMemoire Fin D'etudeooHarold YabenPas encore d'évaluation
- BatimentDocument89 pagesBatimentBelheziel AekPas encore d'évaluation
- Ilovepdf MergedDocument8 pagesIlovepdf MergedTelesphore MoffoPas encore d'évaluation
- Cours 1 Aspects ÉnergétiquesDocument4 pagesCours 1 Aspects ÉnergétiquesbidaouimounirPas encore d'évaluation
- Chapitre 8 Theorie CoupeDocument4 pagesChapitre 8 Theorie Coupesitescompte4Pas encore d'évaluation
- Cours RDM Bon3 PDF WatermarkDocument104 pagesCours RDM Bon3 PDF Watermarkwill diouloPas encore d'évaluation
- Matériaux de ConstructionDocument117 pagesMatériaux de Constructionjules osy tamwo watoPas encore d'évaluation
- CIV1150 6a Contraintes FlexionDocument44 pagesCIV1150 6a Contraintes FlexionRecrutement RecrutementPas encore d'évaluation
- TP Traction-1Document8 pagesTP Traction-1Paul RebourPas encore d'évaluation
- Comportement Composite PDFDocument126 pagesComportement Composite PDFHAMZA SIDOUNAPas encore d'évaluation
- Resume de Strusture en BetonDocument34 pagesResume de Strusture en BetonMaster1 StructuresPas encore d'évaluation
- TD 2 Homogénéisation Dun PlisDocument34 pagesTD 2 Homogénéisation Dun PlisAmine Zedx100% (1)
- Berriet CFM19Document8 pagesBerriet CFM19Farah FrgPas encore d'évaluation
- Chapitre 04 - Poutres ContinuesDocument15 pagesChapitre 04 - Poutres ContinuesrabehiPas encore d'évaluation
- Chap4 UltrasonsDocument55 pagesChap4 Ultrasonsoussema jendoubiPas encore d'évaluation
- Traction Simple - CoursDocument4 pagesTraction Simple - CoursIMAD MANSSOURIPas encore d'évaluation
- Methode Forfaitaire Finale TT Les CasDocument16 pagesMethode Forfaitaire Finale TT Les CasMouffek AitamiratPas encore d'évaluation
- Cours Géomécanique PDFDocument30 pagesCours Géomécanique PDFAnonymous 6iBKWPWPas encore d'évaluation
- TD 03Document2 pagesTD 03Mohsen SaidiPas encore d'évaluation
- RDM ResumeDocument8 pagesRDM Resumeimad ArsPas encore d'évaluation
- Exo 12 RDM Flexion Equerre HydrauliqueDocument4 pagesExo 12 RDM Flexion Equerre HydrauliqueAli AmaraPas encore d'évaluation
- BA EUROCODE 2 Partie3Document36 pagesBA EUROCODE 2 Partie3Dialseny DalabaPas encore d'évaluation