Vous aimerez peut-être aussi
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
- FR Chap 2Document143 pagesFR Chap 2william.genovesePas encore d'évaluation
- Modification Alternateur ValeoDocument5 pagesModification Alternateur ValeoJorge AmaralPas encore d'évaluation
- Alternateur Auto ModifiéDocument18 pagesAlternateur Auto Modifiébengren359Pas encore d'évaluation
- PeltonDocument24 pagesPeltonMohamed Amin DziriPas encore d'évaluation
- Dmarrage Moteur Asynchrone MonophasDocument3 pagesDmarrage Moteur Asynchrone MonophasRomuald GuyayaPas encore d'évaluation
- Expose Accouplement TemporaireDocument37 pagesExpose Accouplement TemporaireSteven Thierry NgoualaPas encore d'évaluation
- Accouplement TPDocument4 pagesAccouplement TPBouabdellaoui saif ennasrPas encore d'évaluation
- MT 03649Document6 pagesMT 03649Zakari YaePas encore d'évaluation
- Chapitre 3 Differents Demarrages Des Moteurs Asynchrones 2020.2021 FinalDocument8 pagesChapitre 3 Differents Demarrages Des Moteurs Asynchrones 2020.2021 Finalالمركز الخاص بالتكوين المهنيPas encore d'évaluation
- Les RéponsesDocument5 pagesLes Réponsesmohssine LaounPas encore d'évaluation
- Moteur Brushless 7Document27 pagesMoteur Brushless 78191424525100% (1)
- Reviewed B3 ET ch2 2023-24 WithnotesDocument105 pagesReviewed B3 ET ch2 2023-24 WithnotesGeorge IgPas encore d'évaluation
- Corrige Questions Mecanique BisDocument8 pagesCorrige Questions Mecanique BisSidi RachPas encore d'évaluation
- Protection de L'analyse de La GénératriceDocument11 pagesProtection de L'analyse de La GénératriceHBNBILPas encore d'évaluation
- Free Energy en Francais Chapter1fDocument57 pagesFree Energy en Francais Chapter1fArmando Jackson100% (2)
- These LALLBEEHARRY NavishDocument26 pagesThese LALLBEEHARRY NavishSARAPas encore d'évaluation
- L'Allumage: GénéralitésDocument6 pagesL'Allumage: GénéralitésATMANE ZIDOUHPas encore d'évaluation
- Cahier Des ChargesDocument4 pagesCahier Des Chargeskamal ECH-ChelfiPas encore d'évaluation
- Projet PalanDocument84 pagesProjet PalanYassire SamirPas encore d'évaluation
- Imprimer Tension Des Courroies La Méthode HarmoniqueDocument5 pagesImprimer Tension Des Courroies La Méthode Harmoniqueromain.richertPas encore d'évaluation
- Production Électrique Autonome Pour Une Habitation - Eolienne, Photovoltaique, Batteries, EtcDocument23 pagesProduction Électrique Autonome Pour Une Habitation - Eolienne, Photovoltaique, Batteries, Etcabdellatif dibPas encore d'évaluation
- Types de Bobinages Alternateurs TriDocument19 pagesTypes de Bobinages Alternateurs Trito_pyt100% (1)
- CCP Tsi Si 2016eDocument30 pagesCCP Tsi Si 2016ekamalPas encore d'évaluation
- Gene Et Moteurs A C.CDocument22 pagesGene Et Moteurs A C.CAbderazak Twitch100% (1)
- Le Moteur À Courant ContinuDocument24 pagesLe Moteur À Courant ContinuMental CalculPas encore d'évaluation
- Pilotage D Un Moteur A Courant Continu Fichiers Arduino TPDocument19 pagesPilotage D Un Moteur A Courant Continu Fichiers Arduino TPt123medPas encore d'évaluation
- Nouveau Document Microsoft WordDocument3 pagesNouveau Document Microsoft WordjyPas encore d'évaluation
- TP Ing1 Machines TournatesDocument48 pagesTP Ing1 Machines Tournatespierre vojnovicPas encore d'évaluation
- Chapter 6 FDocument34 pagesChapter 6 FBrunoLecoutrePas encore d'évaluation
- Exercice BE2 Ensam MeknesDocument8 pagesExercice BE2 Ensam MeknesThe ShadowPas encore d'évaluation
- Refection Faisceau Electrique Alpine A110 1300 VC Version 4Document13 pagesRefection Faisceau Electrique Alpine A110 1300 VC Version 4Michel Le DoctePas encore d'évaluation
- Projet PalanDocument84 pagesProjet PalanAnonymous eYaYLpnZ100% (13)
- Vérins Distributeurs Et Accessoires Pneumatiques PDFDocument25 pagesVérins Distributeurs Et Accessoires Pneumatiques PDFAbdeslam ElmrabetPas encore d'évaluation
- Delty DSDocument14 pagesDelty DSfati fatimaPas encore d'évaluation
- Différence Entre Types de SoudureDocument12 pagesDifférence Entre Types de SoudureXavier DarvillePas encore d'évaluation
- Genmag Secrets EnergieDocument18 pagesGenmag Secrets Energierobert conradPas encore d'évaluation
- Rapport4 Theme2Document9 pagesRapport4 Theme2Amina AlalguiPas encore d'évaluation
- Mechanic U Static 2 - FRDocument25 pagesMechanic U Static 2 - FRahmedelbakhkhakh478Pas encore d'évaluation
- Courant de FOUCAULTDocument5 pagesCourant de FOUCAULTHappy GirlPas encore d'évaluation
- Moteur Électrique TriphaséDocument8 pagesMoteur Électrique TriphasérachidPas encore d'évaluation
- Banc Mesure de CoupleDocument7 pagesBanc Mesure de CoupleJawher SalemPas encore d'évaluation
- Texte TipeDocument2 pagesTexte TipeNz 'Pas encore d'évaluation
- Moteur ATRDocument15 pagesMoteur ATRMouh ZourdaniPas encore d'évaluation
- Véhicule Électrique: Projet de Fin D'etudeDocument11 pagesVéhicule Électrique: Projet de Fin D'etudela bonne savoirPas encore d'évaluation
- TP3 - MCC - Commande de La Machine À Courant ContinuDocument6 pagesTP3 - MCC - Commande de La Machine À Courant Continu22073 22073Pas encore d'évaluation
- C3 - AccouplementsDocument17 pagesC3 - AccouplementscedricPas encore d'évaluation
- Pantographe CaténaireDocument29 pagesPantographe CaténaireZaineb Abbad100% (1)
- AlternateurDocument10 pagesAlternateurgauvain11100% (1)
- (TDP) (CO) Transmission de Puissance PDFDocument16 pages(TDP) (CO) Transmission de Puissance PDFabdelhalimPas encore d'évaluation
- Chap 5b Organes de MachinesDocument19 pagesChap 5b Organes de MachinesAhmed BaalbakiPas encore d'évaluation
- Moteur Brushless PDFDocument2 pagesMoteur Brushless PDFSidi AliPas encore d'évaluation
- Machine - DC GeneratriceDocument17 pagesMachine - DC GeneratriceELIASPas encore d'évaluation
- BobineDocument5 pagesBobineAmine MohamedPas encore d'évaluation
- Article Scientifique V3Document11 pagesArticle Scientifique V3MichelSagno100% (1)
- Demarreur PDFDocument13 pagesDemarreur PDFRiahi Rezeg100% (1)
- DynamoDocument18 pagesDynamoolivier .romeo tambwePas encore d'évaluation
- 08 PrécontrainteDocument40 pages08 PrécontrainteabdouPas encore d'évaluation
- TP Machine ElectriqueDocument17 pagesTP Machine ElectriqueAbderrahim HamdadPas encore d'évaluation
- Le Système Du Vérin HydrauliqueDocument8 pagesLe Système Du Vérin HydrauliqueYoro Boubou SIDIBEPas encore d'évaluation
- rtk5704 701022454Document5 pagesrtk5704 701022454Juan Carlos GutierrezPas encore d'évaluation
- Presentation AmdecDocument26 pagesPresentation Amdectartak12Pas encore d'évaluation
- Calorimetrie Et TravailDocument3 pagesCalorimetrie Et Travailkonrmj.218Pas encore d'évaluation
- Sequentiel ExosDocument20 pagesSequentiel ExosChava TututiPas encore d'évaluation
- Differents Types de VannesDocument5 pagesDifferents Types de Vannesbrel chardorel moukouoloPas encore d'évaluation
- 7 - Réseaux de DistributionDocument24 pages7 - Réseaux de DistributionHanan BenhmaidaPas encore d'évaluation
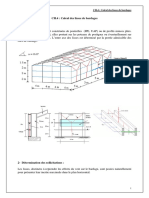
- CH.4 - Calcul Des Lisses de BardagesDocument5 pagesCH.4 - Calcul Des Lisses de BardagesDounia TiPas encore d'évaluation
- SWE100-120-L-S-140-L-200D Staxio - 258946 13-10-01Document272 pagesSWE100-120-L-S-140-L-200D Staxio - 258946 13-10-01Анатолій Корнейчук86% (7)
- Memento Conducteur SDIS 14 - BPPTDocument51 pagesMemento Conducteur SDIS 14 - BPPTbenarousPas encore d'évaluation
- ThermoDocument4 pagesThermoAntes de Partir, A.C.Pas encore d'évaluation
- Cours Thermo Appliquee 2023Document326 pagesCours Thermo Appliquee 2023Michel NsangoPas encore d'évaluation
- Aquasnap 30RB / 30RQ 30RBY / 30RQY: Pro-Dialog +Document23 pagesAquasnap 30RB / 30RQ 30RBY / 30RQY: Pro-Dialog +Assia Oumou MohamedPas encore d'évaluation
- 15 Article Boutina Lyes B15Document4 pages15 Article Boutina Lyes B15Serge KewouPas encore d'évaluation
- ERM ExerciceDocument10 pagesERM Exercicebarg lilPas encore d'évaluation
- Les Compresseurs FrigorifiquesDocument7 pagesLes Compresseurs FrigorifiquesIs Ouatt100% (1)
- Hyundai I10Document16 pagesHyundai I10nsdbusterPas encore d'évaluation
- 8c6rd-Etau de Plombier PDFDocument4 pages8c6rd-Etau de Plombier PDFbecem67% (6)
- DR Pompe HydrauDocument22 pagesDR Pompe HydrauAhmed LabidiPas encore d'évaluation
- 3.2 Technical Maintenance of 4cyl - Mercer - Engine and Its Parts - FR - R3Document51 pages3.2 Technical Maintenance of 4cyl - Mercer - Engine and Its Parts - FR - R3Dragoslav MiloševićPas encore d'évaluation
- Serie 1100Document7 pagesSerie 1100Belghennou Hadj AliPas encore d'évaluation
- 5 7-PDF AideM C3 A9moireVOM PDFDocument1 page5 7-PDF AideM C3 A9moireVOM PDFMourad BoukhedimiPas encore d'évaluation
- Kubota B4200 ManuelDocument44 pagesKubota B4200 ManuelValentín Pérez GuédezPas encore d'évaluation
- Présentation ZizdzdzdDocument8 pagesPrésentation ZizdzdzdAyoub InstruPas encore d'évaluation
- Hotjet Catalogue ENDEFR 2011Document12 pagesHotjet Catalogue ENDEFR 2011dacrysPas encore d'évaluation
- Manuel D'installation Adaptateurs de Brides & SBore - Grands Diametres - Viking Johnson 2015Document3 pagesManuel D'installation Adaptateurs de Brides & SBore - Grands Diametres - Viking Johnson 2015saidloubarPas encore d'évaluation
- Theorie SherbrookeDocument18 pagesTheorie SherbrookeYuùri GimmsPas encore d'évaluation
- Equipements CR MetalDocument4 pagesEquipements CR MetalagustinPas encore d'évaluation
- Coiled TubingDocument23 pagesCoiled TubinggasmigasmiPas encore d'évaluation
- L1SIPC Meca TD PDFDocument61 pagesL1SIPC Meca TD PDFAyman Hamza50% (2)