Vous aimerez peut-être aussi
- Génie Civil Et Const - CMI MGCE S5 2022-2023Document15 pagesGénie Civil Et Const - CMI MGCE S5 2022-2023khaoulaelamine50Pas encore d'évaluation
- CH 1 (Introduction)Document9 pagesCH 1 (Introduction)Badis HamekPas encore d'évaluation
- Déformation Des Poutres Fléchies - Méthode de La Double IntégraleDocument8 pagesDéformation Des Poutres Fléchies - Méthode de La Double IntégraleTarekPas encore d'évaluation
- Chap 02 Déplacements Des Poutres en Flexion PlaneDocument15 pagesChap 02 Déplacements Des Poutres en Flexion Planeyoussouf ahmedbabaPas encore d'évaluation
- Chap2 Cours PDFDocument19 pagesChap2 Cours PDFMohamed Akli IDIRPas encore d'évaluation
- Déformation Et Potentiel InterneDocument21 pagesDéformation Et Potentiel InterneS.DerPas encore d'évaluation
- Cours N°2 EP S1 2022-23Document6 pagesCours N°2 EP S1 2022-23Soundous TayssirPas encore d'évaluation
- Policopi YadjourDocument75 pagesPolicopi YadjourAymen HsPas encore d'évaluation
- Chapitre MefDocument3 pagesChapitre MefMeriem ZebrouchePas encore d'évaluation
- 2021 Suites NumeriquesDocument4 pages2021 Suites NumeriquesmarioagbozoPas encore d'évaluation
- IPhO Exo-1 TS 2018 CorrigéDocument3 pagesIPhO Exo-1 TS 2018 CorrigéNajimou Alade TidjaniPas encore d'évaluation
- Chapitre 4 - Éléments Finis BarresDocument38 pagesChapitre 4 - Éléments Finis Barresossama DzPas encore d'évaluation
- Solution TD 1 MADocument7 pagesSolution TD 1 MAAmi NePas encore d'évaluation
- Chap 7 2017 2018Document9 pagesChap 7 2017 2018MohamedBenKacemPas encore d'évaluation
- Proposition de Correction de L 'Épreuve Du Baccalauréat 2022 Mathématiques Série CDocument9 pagesProposition de Correction de L 'Épreuve Du Baccalauréat 2022 Mathématiques Série CSanto SantoPas encore d'évaluation
- Systèmes Asservis: Chapitre # 03: La Transformée en ZDocument83 pagesSystèmes Asservis: Chapitre # 03: La Transformée en ZAyman OuhajiPas encore d'évaluation
- Cours D'électrotechnique Abomey EnsgepDocument146 pagesCours D'électrotechnique Abomey Ensgepforeol avocetienPas encore d'évaluation
- Cours de RDM Et CS - Déflexion Et Sollicitations ComposéesDocument27 pagesCours de RDM Et CS - Déflexion Et Sollicitations ComposéesYves FaridPas encore d'évaluation
- Chapitre3 Filtrage de WienerDocument6 pagesChapitre3 Filtrage de WienerDocPas encore d'évaluation
- Chapitre V - Formulation Isoparamétrique de La M.E.F.Document58 pagesChapitre V - Formulation Isoparamétrique de La M.E.F.HamidPas encore d'évaluation
- ENSP Bac Math 2003Document5 pagesENSP Bac Math 2003Jean Calvin Odou'ouPas encore d'évaluation
- Composition 2nd Semestre TS1 2018 LAF WWW - Axloutoth.snDocument3 pagesComposition 2nd Semestre TS1 2018 LAF WWW - Axloutoth.snASSANE NDIRPas encore d'évaluation
- 1916 Schwarzschild Exterior FRDocument21 pages1916 Schwarzschild Exterior FRdzairdialnaPas encore d'évaluation
- 3.applications Des Lois de Snell-DescartesDocument16 pages3.applications Des Lois de Snell-DescartesAmina DrkPas encore d'évaluation
- GEOMETRIEDocument19 pagesGEOMETRIEOnanena FaldiPas encore d'évaluation
- MSE PartieII Chap1Document9 pagesMSE PartieII Chap1Illya Haladou Danja IchaouPas encore d'évaluation
- Cours Fonctions - Version ProfDocument11 pagesCours Fonctions - Version Profsoan.soan1230Pas encore d'évaluation
- TD 4 CorrigeDocument4 pagesTD 4 CorrigeVivo Vivoo VIPas encore d'évaluation
- Points Cours_Mouvement Dans Un Champ UniformeDocument6 pagesPoints Cours_Mouvement Dans Un Champ UniformesocranedeoufPas encore d'évaluation
- Test Nov2021 CorrigéDocument11 pagesTest Nov2021 CorrigéDio BrandoPas encore d'évaluation
- MefDocument8 pagesMefDjamelNasratPas encore d'évaluation
- Ett Fondamental 1Document15 pagesEtt Fondamental 1Nina AminaPas encore d'évaluation
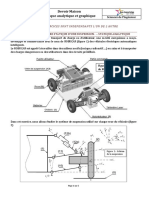
- DM Statique Analytique GraphiqueDocument5 pagesDM Statique Analytique GraphiqueFlav MPas encore d'évaluation
- TDDenombrementProbabilites CorrigeDocument56 pagesTDDenombrementProbabilites CorrigemayssamPas encore d'évaluation
- Proposition Corrigé Maths D J - GATCHOUDocument6 pagesProposition Corrigé Maths D J - GATCHOUAit Cheikh AbdellahPas encore d'évaluation
- MODEL (1) Magazine DerivaDocument3 pagesMODEL (1) Magazine DerivaMonji SaiemPas encore d'évaluation
- Cours MDF Chap2Document10 pagesCours MDF Chap2Amjed LaritPas encore d'évaluation
- SUJET BAC 2023 GUINEE NIGER MathsDocument7 pagesSUJET BAC 2023 GUINEE NIGER MathsJean Michael AttemenePas encore d'évaluation
- Mef IutDocument11 pagesMef IutBelheziel AekPas encore d'évaluation
- Corrig e de La Feuille D'exercices 2: 1 Poly' Edres R EguliersDocument21 pagesCorrig e de La Feuille D'exercices 2: 1 Poly' Edres R EguliersAbderrahim FatnassiPas encore d'évaluation
- Test DDS 2011-2012IT2I - CorrectionDocument5 pagesTest DDS 2011-2012IT2I - CorrectionLoodji JerumePas encore d'évaluation
- MMCSérie 1Document4 pagesMMCSérie 1abahawi07Pas encore d'évaluation
- Chapitre III - Éléments de Contraintes Et de Déformations PlanesDocument45 pagesChapitre III - Éléments de Contraintes Et de Déformations PlanesHamidPas encore d'évaluation
- ExamenElectricite Sem1 Ratt L1MPI 2018-2019Document6 pagesExamenElectricite Sem1 Ratt L1MPI 2018-2019Lamine BayoPas encore d'évaluation
- Exemples TpsDocument20 pagesExemples TpsSarra BÉCHIRIPas encore d'évaluation
- Electricité (PHY1101) FialDocument49 pagesElectricité (PHY1101) Fialsanogoalima715Pas encore d'évaluation
- Corrigé de La Deuxième Série T.D MEFDocument9 pagesCorrigé de La Deuxième Série T.D MEFngadeu ulrichPas encore d'évaluation
- TD 1 CorrectionDocument5 pagesTD 1 CorrectionOUSSAMA CHERNIPas encore d'évaluation
- IntroductionlaMEF Chapitre2Document12 pagesIntroductionlaMEF Chapitre2ahlammaddi123Pas encore d'évaluation
- Compo 2 TDDocument1 pageCompo 2 TDalibrahimallamine365Pas encore d'évaluation
- Epreuve de maths—ENSA 2019Document5 pagesEpreuve de maths—ENSA 2019Matar FllPas encore d'évaluation
- Breye CDocument2 pagesBreye Cyoussefdabio2005Pas encore d'évaluation
- Calcul Pratique Des FlèchesDocument8 pagesCalcul Pratique Des FlèchesAhmed SamirPas encore d'évaluation
- Chapitre 2 Fonctions À Variables ComplexesDocument20 pagesChapitre 2 Fonctions À Variables ComplexesMAISSA LarimPas encore d'évaluation
- Devoir de Ratrapage Mecanique Du PointDocument2 pagesDevoir de Ratrapage Mecanique Du PointPreparation TafemPas encore d'évaluation
- Chapitre - 4. Stabililit dyanmyque-REDocument10 pagesChapitre - 4. Stabililit dyanmyque-REBationo Antoine De padouePas encore d'évaluation
- TD Analyse 2020Document4 pagesTD Analyse 2020Kone Epervier100% (1)
- C1 Modélisation GeomDocument11 pagesC1 Modélisation Geommezyan reggaiPas encore d'évaluation
- C4 Carraux BezierDocument3 pagesC4 Carraux Beziermezyan reggaiPas encore d'évaluation
- Chap III MDS Critères de ResistanceDocument29 pagesChap III MDS Critères de Resistanceamine amiPas encore d'évaluation
- EDM1Document18 pagesEDM1mezyan reggaiPas encore d'évaluation
- Défauts de SoudureDocument38 pagesDéfauts de Souduremezyan reggaiPas encore d'évaluation
- Défauts de SoudureDocument38 pagesDéfauts de Souduremezyan reggaiPas encore d'évaluation
- MagnétoscopieDocument22 pagesMagnétoscopiemezyan reggaiPas encore d'évaluation
- GENERALITE Controle Des SouduresDocument11 pagesGENERALITE Controle Des Souduresmezyan reggaiPas encore d'évaluation
- Défauts de SoudureDocument38 pagesDéfauts de Souduremezyan reggaiPas encore d'évaluation
- Chapitre 1,1Document30 pagesChapitre 1,1mezyan reggaiPas encore d'évaluation
- La Recherche de La Parole PerdueDocument2 pagesLa Recherche de La Parole PerdueAnonymous AueQ7qqU100% (2)
- These PharmacieDocument186 pagesThese PharmacieMounia ArfaouiPas encore d'évaluation
- Petrochimie PDFDocument4 pagesPetrochimie PDFMohamed CherbalPas encore d'évaluation
- 2007-Honda CR-V Manuel ProprietaireDocument344 pages2007-Honda CR-V Manuel ProprietairePhilippe BrichePas encore d'évaluation
- Prog - Fidic Module 1 Avril 2019Document3 pagesProg - Fidic Module 1 Avril 2019abdelhaouariPas encore d'évaluation
- Electronicien AutomobileDocument2 pagesElectronicien Automobilesarobidy HAJANAVALONAPas encore d'évaluation
- Radiolocman 2015/03Document84 pagesRadiolocman 2015/03Александр БорисовPas encore d'évaluation
- Rubrique Pour PoemeDocument1 pageRubrique Pour Poemeapi-322057382Pas encore d'évaluation
- CV AiDocument1 pageCV AiFatima EzzahraPas encore d'évaluation
- Cat 936FDocument16 pagesCat 936FCarlos Arturo AcevedoPas encore d'évaluation
- Sist Iec 60255 3 1995Document9 pagesSist Iec 60255 3 1995Singgih Anggi Dwi HermansyahPas encore d'évaluation
- Exemple de Business Plan Powerpoint Pour Start UpDocument30 pagesExemple de Business Plan Powerpoint Pour Start UpSabeur Dammak100% (1)
- Fréquences National HF Des Communications D'urgenceDocument2 pagesFréquences National HF Des Communications D'urgencePatrice GuillemettePas encore d'évaluation
- BTS Am Anglais Lva Corrige 2013 PDFDocument2 pagesBTS Am Anglais Lva Corrige 2013 PDFCindyZOUKPas encore d'évaluation
- Sujet 20de 20stage 20P2023 5fFuseMetal-FADocument2 pagesSujet 20de 20stage 20P2023 5fFuseMetal-FAJihen BoukadidaPas encore d'évaluation
- Fiche Description Processus ProdDocument3 pagesFiche Description Processus ProdZeineb Hachicha100% (1)
- Correction EFF EP 2006 V18-ConvertiDocument8 pagesCorrection EFF EP 2006 V18-ConvertiImane ZahranePas encore d'évaluation
- Application de Gestion Des StagiairesDocument7 pagesApplication de Gestion Des StagiairesAyoub JadiaPas encore d'évaluation
- EbssDocument4 pagesEbssmnawarPas encore d'évaluation
- Le Resume de Texte PDFDocument1 pageLe Resume de Texte PDFbouaziz samiPas encore d'évaluation
- Flambage - WikipédiaDocument30 pagesFlambage - WikipédiaJatawPas encore d'évaluation
- D ModulationDocument3 pagesD ModulationNajmeddine Ben MeftehPas encore d'évaluation
- Cours Electronique de Puissance EPDocument49 pagesCours Electronique de Puissance EPfarid saadPas encore d'évaluation
- Chapitre I Carte Les Supports de Vente en RestaurationDocument5 pagesChapitre I Carte Les Supports de Vente en RestaurationSalah KmadouPas encore d'évaluation
- Franck CINE Propose de Payer Ses Dettes A Travers Un ProtocoleDocument20 pagesFranck CINE Propose de Payer Ses Dettes A Travers Un ProtocoleHaitel HaitiPas encore d'évaluation
- Rapport de StageDocument31 pagesRapport de StageAbdelaliPas encore d'évaluation
- TP Fonctions FinancièresDocument2 pagesTP Fonctions FinancièresGhita WassilaPas encore d'évaluation
- Cours - MI2 - II - Arbre de DéfaillanceDocument27 pagesCours - MI2 - II - Arbre de DéfaillanceRafik BenhendaPas encore d'évaluation
- THH 15-20 MarsDocument43 pagesTHH 15-20 MarsNarindra SafidinantenainaPas encore d'évaluation
- Protocole de Recherche CONTRIBUTION DE L'AUDIT INTERNE A LA PERFORMANCE FINANCIEREDocument20 pagesProtocole de Recherche CONTRIBUTION DE L'AUDIT INTERNE A LA PERFORMANCE FINANCIERENupcia100% (1)