Vous aimerez peut-être aussi
- 09 Modelisation AM ElevesDocument17 pages09 Modelisation AM Eleveschab haniPas encore d'évaluation
- Modélisation Actions MecaniqueDocument8 pagesModélisation Actions MecaniqueMhenni ChakerPas encore d'évaluation
- Chap I Statique 21-22Document41 pagesChap I Statique 21-22youlmafia99Pas encore d'évaluation
- Modelisation AMDocument9 pagesModelisation AMKacou FatimPas encore d'évaluation
- Modelisation Actions MecaniquesDocument8 pagesModelisation Actions MecaniquesKouki NizarPas encore d'évaluation
- Cours05 Modélisation Des Actions MécaniquesDocument8 pagesCours05 Modélisation Des Actions MécaniquesHaddyツPas encore d'évaluation
- Rappelsdemcanique 140327185537 Phpapp01Document41 pagesRappelsdemcanique 140327185537 Phpapp01faouzidz75Pas encore d'évaluation
- Statique Des Systèmes Mécaniques: Ciences Ndustrielles Pour L' NgénieurDocument18 pagesStatique Des Systèmes Mécaniques: Ciences Ndustrielles Pour L' NgénieurMiloud HadoudiPas encore d'évaluation
- Comportement Statique Des SystèmesDocument23 pagesComportement Statique Des Systèmeskokonut84Pas encore d'évaluation
- DynamiqueDocument6 pagesDynamiqueYounes AblePas encore d'évaluation
- Modélisation Actions Mecaniques 3 - Fiche RepèreDocument7 pagesModélisation Actions Mecaniques 3 - Fiche Repèrefernandez.ev91jeuxPas encore d'évaluation
- Statique Du Solide PolyDocument44 pagesStatique Du Solide Polyslimani abdelilah100% (2)
- Rappels de MécaniqueDocument41 pagesRappels de MécaniqueBoud Elhassan0% (1)
- PROG+chap1 Master1 2014Document22 pagesPROG+chap1 Master1 2014Hawa TembelyPas encore d'évaluation
- Programme de RDM 2 - 2014Document20 pagesProgramme de RDM 2 - 2014Hawa TembelyPas encore d'évaluation
- Introduction À La MécaniqueDocument93 pagesIntroduction À La Mécaniquehaourch aminePas encore d'évaluation
- Power Point Statique Des SolidesDocument58 pagesPower Point Statique Des SolidesBenjip 36Pas encore d'évaluation
- Polycopi Mcanique Analytique Mendas - CompressedDocument140 pagesPolycopi Mcanique Analytique Mendas - CompressedAnonymous gViEc4100% (1)
- Statique Du SolideDocument55 pagesStatique Du SolideZiko100% (1)
- Cours Action Mécanique Force 2013 2014 (Sdiri Anis)Document4 pagesCours Action Mécanique Force 2013 2014 (Sdiri Anis)Nas MastourPas encore d'évaluation
- Cours - Sciences Physiques Action Mécanique Force - 1ère As (2013-2014) MR Sdiri AnisDocument4 pagesCours - Sciences Physiques Action Mécanique Force - 1ère As (2013-2014) MR Sdiri AnisYosri GostPas encore d'évaluation
- Chap 2 Modelisation Des Actions MecaniquesDocument8 pagesChap 2 Modelisation Des Actions MecaniquesAida DiackPas encore d'évaluation
- Cours Modélisation Des Actions Mécaniques - ÉlèvesDocument7 pagesCours Modélisation Des Actions Mécaniques - Élèvesjulien skorka100% (1)
- Cours 1 Propriétés Dynamiques de La Machine À Courant ContinuDocument12 pagesCours 1 Propriétés Dynamiques de La Machine À Courant ContinuannaPas encore d'évaluation
- Chapitre 2 TorseursDocument13 pagesChapitre 2 TorseursHediFatnassiPas encore d'évaluation
- Dokumen - Tips - Cours Principe Fondamental de La Statique 1re 2019v2 PDFDocument4 pagesDokumen - Tips - Cours Principe Fondamental de La Statique 1re 2019v2 PDFOusmane NiangPas encore d'évaluation
- Mecarat2_Chap1_011920Document38 pagesMecarat2_Chap1_011920Jean-Raoul MuyumbuPas encore d'évaluation
- CHAPII. Spectroscopie de Rotation PureDocument38 pagesCHAPII. Spectroscopie de Rotation PureMalak DamichePas encore d'évaluation
- Activité Expérimentale: Actions Mécanique, Couple de Forces, Travail Et Energie CinétiqueDocument3 pagesActivité Expérimentale: Actions Mécanique, Couple de Forces, Travail Et Energie CinétiqueboustakatbPas encore d'évaluation
- Cours 2018 - 2019Document4 pagesCours 2018 - 2019Amine AlaoUii AlaouiPas encore d'évaluation
- CollectionGANDO Mécanique-RDM 2nde 00Document25 pagesCollectionGANDO Mécanique-RDM 2nde 00V. Isaïe Modeste GANDOPas encore d'évaluation
- Travail Et Énergie CinétiqueDocument5 pagesTravail Et Énergie Cinétiquemouhcine100% (1)
- MecaChap2 (ForcesMoments)Document12 pagesMecaChap2 (ForcesMoments)IdrissBarinePas encore d'évaluation
- Jean-Pierre Caron, Jean-Paul Hautier-Modélisation Et Commande de La Machine Asynchrone-Technip (1995)Document9 pagesJean-Pierre Caron, Jean-Paul Hautier-Modélisation Et Commande de La Machine Asynchrone-Technip (1995)Yann ElhamPas encore d'évaluation
- Version Du 11 Août 2022 (12h59)Document13 pagesVersion Du 11 Août 2022 (12h59)Stan YannPas encore d'évaluation
- M22 Forces CentralesDocument12 pagesM22 Forces CentralesTristan DelplacePas encore d'évaluation
- Cours 2018 - 2019Document4 pagesCours 2018 - 2019mohamed laghribPas encore d'évaluation
- Analyse Vibratoire Et Equilibrage Des Machines Tournantes ConvertiDocument18 pagesAnalyse Vibratoire Et Equilibrage Des Machines Tournantes ConvertiHamza YahiaouiPas encore d'évaluation
- TD - Vibrationdes SystemesDocument5 pagesTD - Vibrationdes SystemesLamyae KrimiPas encore d'évaluation
- Td 1 de Mecanique Appliquee CA 2021 2022Document10 pagesTd 1 de Mecanique Appliquee CA 2021 2022Assane NiangaoPas encore d'évaluation
- Spectro Chap 2Document32 pagesSpectro Chap 2Simo WacPas encore d'évaluation
- Apsim CNC Sii MP Psi 2020Document13 pagesApsim CNC Sii MP Psi 2020Lamiaa CherkaPas encore d'évaluation
- PC 2nd C - P2 Actions Mecaniques Ou Forces ValidéDocument12 pagesPC 2nd C - P2 Actions Mecaniques Ou Forces Validésoumahoro brahimaPas encore d'évaluation
- Chap05 OH 2023Document11 pagesChap05 OH 2023dawoud.kenzariPas encore d'évaluation
- CHAPITRE2 PDDocument3 pagesCHAPITRE2 PDDuplexPas encore d'évaluation
- Chapitre 7Document10 pagesChapitre 7ziadajude27Pas encore d'évaluation
- MLCDocument11 pagesMLCandoPas encore d'évaluation
- Actions Mecaniques Forces Resume de Cours 3Document3 pagesActions Mecaniques Forces Resume de Cours 3mohamedPas encore d'évaluation
- Cours MEF Partie 2Document36 pagesCours MEF Partie 2Wiam BalloukPas encore d'évaluation
- Cours I - Actions MécaniquesDocument10 pagesCours I - Actions MécaniquesMeryem AmgharPas encore d'évaluation
- TP Forces Dynamometre Élève Anh TânDocument6 pagesTP Forces Dynamometre Élève Anh TânWhavoPas encore d'évaluation
- Mécanique Industrielle 1CPI CHAP - 10Document5 pagesMécanique Industrielle 1CPI CHAP - 10ayoubizwika.75Pas encore d'évaluation
- TD T 7.2 TEC Vis EcrouDocument2 pagesTD T 7.2 TEC Vis Ecrouisrael MelchisedechPas encore d'évaluation
- mcc1 PDFDocument11 pagesmcc1 PDFYazid AbouchihabeddinePas encore d'évaluation
- ArbresDocument74 pagesArbresfernandtPas encore d'évaluation
- Beni-Mellal-Khenifra Examen Regional PC 2021 Sujet PDFDocument3 pagesBeni-Mellal-Khenifra Examen Regional PC 2021 Sujet PDFAhmed Taha RazinPas encore d'évaluation
- 48.calcul Des Structures 2Document19 pages48.calcul Des Structures 2Balogun Aboubakar WilfriedPas encore d'évaluation
- 07 CoursDocument8 pages07 CoursPseudo785Pas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Fic 00013Document8 pagesFic 00013Anonymous 73gEYyEtLPas encore d'évaluation
- Fonctions Continues Exo7Document7 pagesFonctions Continues Exo7Wassi AkrouchePas encore d'évaluation
- Cours de Mécanique Des Solides Version 2020 PDFDocument55 pagesCours de Mécanique Des Solides Version 2020 PDFÃh Mëd Hä MdįPas encore d'évaluation
- ChapI RadioDocument9 pagesChapI RadioFatimazahrae FakirPas encore d'évaluation
- Fr. Demande PFEDocument1 pageFr. Demande PFEahmedchamroukhi123Pas encore d'évaluation
- Chapitre III Et V Cours CristallochimieDocument25 pagesChapitre III Et V Cours Cristallochimieahmedchamroukhi123Pas encore d'évaluation
- 55649802704Document2 pages55649802704ahmedchamroukhi123Pas encore d'évaluation
- Le Vocabulaire TechniqueDocument1 pageLe Vocabulaire Techniqueahmedchamroukhi123Pas encore d'évaluation
- Rapport de StageDocument7 pagesRapport de StagebenbadaPas encore d'évaluation
- Recits D'un Pèlerin RusseDocument160 pagesRecits D'un Pèlerin RusseGuillaume Morgenstern100% (5)
- Transport Logistique Ministere Des Finances MarocDocument27 pagesTransport Logistique Ministere Des Finances MarocImane BenrahmounePas encore d'évaluation
- Ecosystèmes D'affaires & de Connaissances - Une Lecture Suivant Les Analogies Du Jeu de GoDocument94 pagesEcosystèmes D'affaires & de Connaissances - Une Lecture Suivant Les Analogies Du Jeu de GoammoniosPas encore d'évaluation
- 6 7091 E79da38f PDFDocument24 pages6 7091 E79da38f PDFSAEC LIBERTEPas encore d'évaluation
- ParnassaDocument62 pagesParnassaAli TraorePas encore d'évaluation
- Essai Accéléré de Réaction Sulfatique Externe (RSE)Document11 pagesEssai Accéléré de Réaction Sulfatique Externe (RSE)Rafik SiamPas encore d'évaluation
- Table de Contenus EditoDocument5 pagesTable de Contenus EditoDajana KantardžićPas encore d'évaluation
- Chap5 Complexe en Électricité - 2021-2022Document29 pagesChap5 Complexe en Électricité - 2021-2022Balayira BakaryPas encore d'évaluation
- Acfrogdtvvmhsyokaxk9q9ktmv8ergolx3 8r7mirpt6v0g8ws9791lwm0erykcgoe - Oxnasmm7zamygytzylwahyey2bio4ju6kha9f O-Mtovs31mlbtazlp83rq6izewdexdeitn7oqdxmsdDocument2 pagesAcfrogdtvvmhsyokaxk9q9ktmv8ergolx3 8r7mirpt6v0g8ws9791lwm0erykcgoe - Oxnasmm7zamygytzylwahyey2bio4ju6kha9f O-Mtovs31mlbtazlp83rq6izewdexdeitn7oqdxmsdEL MéhdiPas encore d'évaluation
- Explication - Louise Labé, Sonnet 8Document2 pagesExplication - Louise Labé, Sonnet 8lyblanc100% (3)
- Filières Ouvertes À l'UAE en 2021-2022-1Document9 pagesFilières Ouvertes À l'UAE en 2021-2022-1james dorPas encore d'évaluation
- Nibridge: Unibridge®: Construire Et ReconstruireDocument2 pagesNibridge: Unibridge®: Construire Et ReconstruireorbediePas encore d'évaluation
- Programme Général Et CAODocument12 pagesProgramme Général Et CAOHOUDAPas encore d'évaluation
- Balistique - SniperSoricomDocument30 pagesBalistique - SniperSoricomKishore BarreteauPas encore d'évaluation
- Motrec WebManual - E 280B AC - 1131229upDocument61 pagesMotrec WebManual - E 280B AC - 1131229uppedro javier carrera juradoPas encore d'évaluation
- Livre ES TS 2020 PDFDocument8 pagesLivre ES TS 2020 PDFYoussef KhalfaPas encore d'évaluation
- Infos Complémentaires Balade Et Bonne Mine 2021Document1 pageInfos Complémentaires Balade Et Bonne Mine 2021Christian CouteauPas encore d'évaluation
- SYLLABUS TIME MANAGEMENT Gestion Du Temps Et Des PrioritésDocument2 pagesSYLLABUS TIME MANAGEMENT Gestion Du Temps Et Des PrioritésMamadou GueyePas encore d'évaluation
- 01-Principe Des Essais de PuitsDocument13 pages01-Principe Des Essais de Puitsaoua1997100% (1)
- Asymétrie D'informationsDocument6 pagesAsymétrie D'informationsDjoufack JanvierPas encore d'évaluation
- Memoire ChiakaDocument76 pagesMemoire ChiakaIrie Fabrice ZROPas encore d'évaluation
- O God Beyond All PraisingDocument3 pagesO God Beyond All Praisingkoyske71% (7)
- Inhibiteurs de Pompe À ProtonsDocument1 pageInhibiteurs de Pompe À ProtonsYasmine TarchounPas encore d'évaluation
- 52910Document9 pages52910mostabouPas encore d'évaluation
- (LA) 2 Racine, Phèdre I3 (Aveu)Document6 pages(LA) 2 Racine, Phèdre I3 (Aveu)koana bshsPas encore d'évaluation
- Eurochain VL FRDocument8 pagesEurochain VL FRSalaheddine OURPas encore d'évaluation
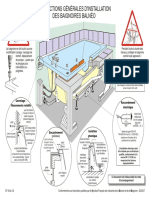
- BalneoDocument2 pagesBalneocloud adsophPas encore d'évaluation
- RappelHTML WebSémantiqueDocument2 pagesRappelHTML WebSémantiqueNour LetaiefPas encore d'évaluation
- Revues de DirectionDocument39 pagesRevues de DirectionTim Stelens Seka100% (1)