Vous aimerez peut-être aussi
- DM 08Document3 pagesDM 08Abena Bala Marc-LoïcPas encore d'évaluation
- jour 3Document3 pagesjour 3victoria.sonnier0025Pas encore d'évaluation
- Methode Gradient OptimalDocument4 pagesMethode Gradient OptimalJunior WoléPas encore d'évaluation
- ANA4 EX1415 A CORDocument3 pagesANA4 EX1415 A CORAssimi DialloPas encore d'évaluation
- jour 3 (1)Document6 pagesjour 3 (1)victoria.sonnier0025Pas encore d'évaluation
- 6 RécurrenceDocument6 pages6 RécurrenceEl SKY777Pas encore d'évaluation
- Complexe 2 - 23Document4 pagesComplexe 2 - 23fbdbhdPas encore d'évaluation
- TD Ar 6 CorDocument14 pagesTD Ar 6 Corandraina.rajaobelinaPas encore d'évaluation
- Enoncé DZETADocument4 pagesEnoncé DZETAchaddad abdllahPas encore d'évaluation
- Ds 04Document4 pagesDs 04Saad NaciriPas encore d'évaluation
- Integrale Riemann 1Document25 pagesIntegrale Riemann 1idrissa sackoPas encore d'évaluation
- Ds 09Document4 pagesDs 09NATSU01 FFPas encore d'évaluation
- Corrds 08Document10 pagesCorrds 08Caleb KPONOUPas encore d'évaluation
- 2021 FUI-FF Session 2 SUJET DE MATHSDocument4 pages2021 FUI-FF Session 2 SUJET DE MATHSEnglish ProgressPas encore d'évaluation
- Poly VCDocument122 pagesPoly VCAlex BugaPas encore d'évaluation
- Ensembles, Application 2 - 21-23Document4 pagesEnsembles, Application 2 - 21-23fbdbhdPas encore d'évaluation
- Banque X-ÉNS 2023 MP Mathématiques C eDocument6 pagesBanque X-ÉNS 2023 MP Mathématiques C eZizo chmiaPas encore d'évaluation
- Capes 2018 M1 EnonceDocument6 pagesCapes 2018 M1 EnonceOhaPas encore d'évaluation
- TD Ar 7 CorDocument16 pagesTD Ar 7 CorMaha SsinePas encore d'évaluation
- Devoir Libre IntegDocument4 pagesDevoir Libre IntegaminaPas encore d'évaluation
- ALAIN TROESCH Corrigé DM N°1Document10 pagesALAIN TROESCH Corrigé DM N°1Ivann Kamdem100% (1)
- Poly EVNTDocument20 pagesPoly EVNTaliturkiPas encore d'évaluation
- Suite, F.continues-21-22Document4 pagesSuite, F.continues-21-22fbdbhdPas encore d'évaluation
- dm01 (1)Document4 pagesdm01 (1)kupoalorchristian1Pas encore d'évaluation
- TD2 Dérivation-1Document2 pagesTD2 Dérivation-1medredahadiPas encore d'évaluation
- Développents limités (1)Document7 pagesDéveloppents limités (1)Aya BelghaziPas encore d'évaluation
- Dzeta enonceDocument4 pagesDzeta enoncevictoria.sonnier0025Pas encore d'évaluation
- M1 CC CorrigéDocument5 pagesM1 CC CorrigéSouid GhadaPas encore d'évaluation
- UntitledDocument4 pagesUntitledMohammed DroussiPas encore d'évaluation
- Chapitre 2 PDFDocument19 pagesChapitre 2 PDFAlyani AsmaPas encore d'évaluation
- ExercicesDocument47 pagesExercicesAlpha NostPas encore d'évaluation
- dm9 FctsReellesDocument5 pagesdm9 FctsReellesmarouaelkhayPas encore d'évaluation
- 2M261 Corr15maiDocument10 pages2M261 Corr15maiyedoubou LORIMPOPas encore d'évaluation
- Développements Possibles Pour Les Équations DifférentiellesDocument6 pagesDéveloppements Possibles Pour Les Équations DifférentiellesJangoPas encore d'évaluation
- Cours Geometrie ch3Document23 pagesCours Geometrie ch3Jofa AndrimbeloPas encore d'évaluation
- Eq DiffDocument28 pagesEq Diffmeryem sanimPas encore d'évaluation
- TD4-5 CorrigeDocument10 pagesTD4-5 CorrigeALIOU DIALLOPas encore d'évaluation
- TD4 5Document5 pagesTD4 5ALIOU DIALLOPas encore d'évaluation
- DM 09Document5 pagesDM 09James CarterPas encore d'évaluation
- Corrdm 01Document12 pagesCorrdm 01fbdbhdPas encore d'évaluation
- 2019 FUI-FF Session 2 SUJET MATHEMATIQUESDocument6 pages2019 FUI-FF Session 2 SUJET MATHEMATIQUESEyoubPas encore d'évaluation
- DM 12Document2 pagesDM 12DupuyPas encore d'évaluation
- 2023 Fui-Ff Session Printemps Sujet MathematiquesDocument5 pages2023 Fui-Ff Session Printemps Sujet Mathematiquesdqjxk9syq6Pas encore d'évaluation
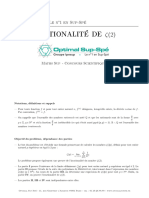
- 1. Soient α ą 0, α ą 0 donn´ es. Montrer (3) - (4) s'´ ecrit sous la forme ´ equivalente suivante: v pγq ' α v pγq " v pγq ' α v pγq, (5) ´v pγq ' α v pγq " ´v pγq ' α v pγq,Document4 pages1. Soient α ą 0, α ą 0 donn´ es. Montrer (3) - (4) s'´ ecrit sous la forme ´ equivalente suivante: v pγq ' α v pγq " v pγq ' α v pγq, (5) ´v pγq ' α v pγq " ´v pγq ' α v pγq,Said SaterihPas encore d'évaluation
- Fiche de Cours Séries MP MPDocument3 pagesFiche de Cours Séries MP MPHamouda BaghdadiPas encore d'évaluation
- TD Ar 3 CorDocument13 pagesTD Ar 3 CorHoussein EL GHARSPas encore d'évaluation
- ILEMATHS Maths T Continuite-CoursDocument4 pagesILEMATHS Maths T Continuite-CoursMamadou djibril Ba100% (1)
- Rappel (C.f. Cours) : Analyse Numérique - TD8 Méthodes Itératives Pour La Résolution Des Systèmes LinéairesDocument2 pagesRappel (C.f. Cours) : Analyse Numérique - TD8 Méthodes Itératives Pour La Résolution Des Systèmes LinéairesALIOU DIALLOPas encore d'évaluation
- Probas 6Document37 pagesProbas 6Rajae ChainabouPas encore d'évaluation
- 1M001 2017 ch5 Polynomes 20170828Document10 pages1M001 2017 ch5 Polynomes 20170828Anabel JohannaPas encore d'évaluation
- Eq Diff 2Document2 pagesEq Diff 2yousfi majdPas encore d'évaluation
- 4-Liaison Cristalline Correction Devoir 4 PDFDocument9 pages4-Liaison Cristalline Correction Devoir 4 PDFyoussra elkabdiPas encore d'évaluation
- Methode_secanteDocument2 pagesMethode_secanteAbdramanePas encore d'évaluation
- 2021 Fui-Ff S1 Sujet Ecrit de MathsDocument6 pages2021 Fui-Ff S1 Sujet Ecrit de MathsELO100% (2)
- 2021_Sujet_2C_Maths_MathsDocument8 pages2021_Sujet_2C_Maths_Mathsmap35.chessPas encore d'évaluation
- Corrdm06 CopieDocument6 pagesCorrdm06 CopiefbdbhdPas encore d'évaluation
- Séries Et Fonctions VectoriellesDocument13 pagesSéries Et Fonctions VectoriellesLoïc MBELE KASTHANEPas encore d'évaluation
- L2PS Ch12Document11 pagesL2PS Ch12ArchimèdePas encore d'évaluation
- Ipt Mpsi Tp13 CorrigeDocument19 pagesIpt Mpsi Tp13 CorrigeSwayziiPas encore d'évaluation
- TP Final InitiationDocument10 pagesTP Final InitiationAgape LwanzoPas encore d'évaluation
- Đáp Án (Answer Key) Cuốn ETS 2019Document14 pagesĐáp Án (Answer Key) Cuốn ETS 2019Pham NguyenPas encore d'évaluation
- OrangeMoney Terms FRDocument26 pagesOrangeMoney Terms FRMVOGO FabienPas encore d'évaluation
- H.248 Protocol FRDocument51 pagesH.248 Protocol FRAbdelilah Charboub100% (1)
- N18 - Fluidisation PCBDocument17 pagesN18 - Fluidisation PCBrania rejebPas encore d'évaluation
- (1905) Grammaire Annamite À L'usage Des Français de L'annam Et Du Tonkin - P. VallotDocument262 pages(1905) Grammaire Annamite À L'usage Des Français de L'annam Et Du Tonkin - P. Vallotnvh92Pas encore d'évaluation
- Duo Pour Piano Et GuitareDocument4 pagesDuo Pour Piano Et Guitarecamilo sanabriaPas encore d'évaluation
- Propriétés Et Appropriation Des Lectures Numériques Au Sein Du Medium TabletteDocument98 pagesPropriétés Et Appropriation Des Lectures Numériques Au Sein Du Medium TabletteNoamNorkhat100% (1)
- Reussir Pas A Pas Dans LongrichDocument17 pagesReussir Pas A Pas Dans LongrichAbdoulaye OlaoyePas encore d'évaluation
- Plan de Ferraillage TablierDocument1 pagePlan de Ferraillage TablierFiras KorPas encore d'évaluation
- Reactualisation Etudes Impact Block CI PDFDocument252 pagesReactualisation Etudes Impact Block CI PDFAdikoDenzeyAnonhPas encore d'évaluation
- Ressources Formation PowerShell Niveau InitiationDocument89 pagesRessources Formation PowerShell Niveau InitiationHenri HemlePas encore d'évaluation
- Management DES ORGANISATIONS PubliquesDocument42 pagesManagement DES ORGANISATIONS PubliquesRandom AccountPas encore d'évaluation
- Lexique - Les Nouvelles TechnologiesDocument3 pagesLexique - Les Nouvelles Technologiesmaria jesusPas encore d'évaluation
- 04 Sigma Binome ChapitreDocument29 pages04 Sigma Binome ChapitrefbdbhdPas encore d'évaluation
- Communique Officiel Punaise de LitDocument2 pagesCommunique Officiel Punaise de LitMohamed InnekidenePas encore d'évaluation
- 2021 2022 V1 Applications1 Elements Finis J GasparouxDocument7 pages2021 2022 V1 Applications1 Elements Finis J GasparouxNawel23 MLKPas encore d'évaluation
- Le Passage Du Résultat Comptable Au Résultat FiscalDocument138 pagesLe Passage Du Résultat Comptable Au Résultat Fiscalabouyoucef ABBAD100% (2)
- Livre PDFDocument166 pagesLivre PDFviviana100% (7)
- Facteurs Dinfluences ExternesDocument2 pagesFacteurs Dinfluences ExternesJean-Luc BastinPas encore d'évaluation
- Expresiones Coloquiales en FrancésDocument5 pagesExpresiones Coloquiales en FrancésPaul DaugentePas encore d'évaluation
- Cours MateriauxDocument6 pagesCours Materiauxbeey2001Pas encore d'évaluation
- 604 S - Eléments de Technologie CAT PDFDocument61 pages604 S - Eléments de Technologie CAT PDFHugo Tia100% (4)
- Recommandations Professionnelles Pour La Manutention en Sécurité Des Éléments Architecturaux 178P Octobre2008Document57 pagesRecommandations Professionnelles Pour La Manutention en Sécurité Des Éléments Architecturaux 178P Octobre2008Sénant Jean-MarcPas encore d'évaluation
- Cei FRDocument2 pagesCei FRelmoummyPas encore d'évaluation
- Grève de La SNAVDocument27 pagesGrève de La SNAV68ardenPas encore d'évaluation
- Cahier de Technologie 1er Sec CouleurDocument145 pagesCahier de Technologie 1er Sec CouleurZied BaccarPas encore d'évaluation
- BclogoDocument31 pagesBclogonour1960Pas encore d'évaluation
- Administrateur Système & ApplicationDocument2 pagesAdministrateur Système & Applicationfokom talom gaetanPas encore d'évaluation