Vous aimerez peut-être aussi
- Centrifugeuse CorrectionDocument3 pagesCentrifugeuse Correctionp100% (2)
- TP Plan InclineDocument7 pagesTP Plan Inclineislambenhamida100% (4)
- Corrige Ecole de L Air MP 2003Document4 pagesCorrige Ecole de L Air MP 2003Youssef El Asri50% (2)
- Corrigé TD 21 - Comportement Statique Des SystèmesDocument7 pagesCorrigé TD 21 - Comportement Statique Des Systèmesbhs channel100% (1)
- Exercices Corriges Mecanique Du PointDocument124 pagesExercices Corriges Mecanique Du PointHiba Ep Ezou81% (21)
- Compte Rendu TP5 Plan InclinéDocument8 pagesCompte Rendu TP5 Plan InclinéÀzïz LA75% (4)
- Mpsem 2Document14 pagesMpsem 2Ossama FarajiPas encore d'évaluation
- Theorie SpheriqueDocument7 pagesTheorie SpheriqueAbdel HassibPas encore d'évaluation
- PDF Barriere Parking Correction PDFDocument2 pagesPDF Barriere Parking Correction PDFHaytem HirochimaPas encore d'évaluation
- Pendule Inverse en RobotiqueDocument20 pagesPendule Inverse en Robotiqueoussama elhjoujiPas encore d'évaluation
- GM DS4-2015 CorrigeDocument5 pagesGM DS4-2015 Corrigeahmed TVPas encore d'évaluation
- TD Mcanique Cinmatique 2017Document1 pageTD Mcanique Cinmatique 2017A-bdourahman H-assanPas encore d'évaluation
- TP NouveauDocument9 pagesTP NouveauMohamed STITOUPas encore d'évaluation
- TD 4 CorrDocument5 pagesTD 4 CorrMeng HeangPas encore d'évaluation
- Correction Tp2iemlnewtonDocument4 pagesCorrection Tp2iemlnewtonMaryam YammPas encore d'évaluation
- TD N - 1 Thermo II Corrigé 2014 PDFDocument6 pagesTD N - 1 Thermo II Corrigé 2014 PDFMomoBjPas encore d'évaluation
- Fiche Chute LibreDocument3 pagesFiche Chute LibreBre4kPas encore d'évaluation
- Corrigé TD Cristallo-ChimieDocument4 pagesCorrigé TD Cristallo-ChimieChi faaPas encore d'évaluation
- TP Roue de MaxwellDocument10 pagesTP Roue de MaxwellOthmane FathPas encore d'évaluation
- Cours3 P&C GCV2 IpsasDocument7 pagesCours3 P&C GCV2 Ipsaskorossaga innocent tourePas encore d'évaluation
- Corrige Exam M.G s3 s1!20!21 - Ll2phDocument4 pagesCorrige Exam M.G s3 s1!20!21 - Ll2phBertrand DingamPas encore d'évaluation
- ch3 CCompositionMvt2010Document22 pagesch3 CCompositionMvt2010kimPas encore d'évaluation
- Résumé de Cours Gravimétrie - 2016Document21 pagesRésumé de Cours Gravimétrie - 2016AIT TAHAR Neila100% (1)
- Cours Maths 3Document46 pagesCours Maths 3Tabani OussamaPas encore d'évaluation
- Devoir MG 2015 - 2016Document3 pagesDevoir MG 2015 - 2016khaled sioudPas encore d'évaluation
- Déploiement Des Bras D'un Satellite CDocument3 pagesDéploiement Des Bras D'un Satellite CSoulaiman Andahmou100% (1)
- Physique 19Document20 pagesPhysique 19Meryem ELMOGHRTIPas encore d'évaluation
- Corrigé Du CC2-mastermecaflu-1718Document6 pagesCorrigé Du CC2-mastermecaflu-1718Fatima Ezzahrae BOUITAPas encore d'évaluation
- Meca Se 21Document7 pagesMeca Se 21ZedzedPas encore d'évaluation
- Corrigé TD 15 - Liaisons - Schéma CinématiqueDocument6 pagesCorrigé TD 15 - Liaisons - Schéma Cinématiquebhs channelPas encore d'évaluation
- Sec Minesponts 2006 Sic MPDocument17 pagesSec Minesponts 2006 Sic MPBrahim AchayfadPas encore d'évaluation
- AIDER - Yacine - Rapport Final - PK2Document16 pagesAIDER - Yacine - Rapport Final - PK2parck666Pas encore d'évaluation
- Corr - DM Nc2b03 de Mecc81canique de SolideDocument7 pagesCorr - DM Nc2b03 de Mecc81canique de SolideecomechPas encore d'évaluation
- TD N°2 GP 2016-2017Document13 pagesTD N°2 GP 2016-2017SALEHPas encore d'évaluation
- Corrigé ccp2011 physIIDocument5 pagesCorrigé ccp2011 physIIanon_342643568100% (5)
- 005 paraDocument3 pages005 parajazzy075Pas encore d'évaluation
- Chap 3 Cours Phys 3Document2 pagesChap 3 Cours Phys 3hakim1348Pas encore d'évaluation
- Chap 2 - Similitude Dans Les TurbomachinesDocument28 pagesChap 2 - Similitude Dans Les TurbomachinesIkram El JamaiPas encore d'évaluation
- Test2 RR2022 23 SolDocument2 pagesTest2 RR2022 23 Soltraorekanou10Pas encore d'évaluation
- Examen+Corrigé Phys 1 - 1ère Année ST - 07-08 PDFDocument4 pagesExamen+Corrigé Phys 1 - 1ère Année ST - 07-08 PDFRai newPas encore d'évaluation
- S42 Moment Statique Et Centre de Gravité TAHDocument7 pagesS42 Moment Statique Et Centre de Gravité TAHIsaak houmadiPas encore d'évaluation
- Exercices Corrige Geo DifDocument13 pagesExercices Corrige Geo DifjusticeackermannPas encore d'évaluation
- X - Enfin, Le Fluide Sort de L'auget À Une Hauteur y Y.: Problème 1: Auget Mobile (6 Points)Document10 pagesX - Enfin, Le Fluide Sort de L'auget À Une Hauteur y Y.: Problème 1: Auget Mobile (6 Points)The X prof academy أكاديمية الأستاذ المجهولPas encore d'évaluation
- Corrigé TD Dynamique Du Point MatérielDocument3 pagesCorrigé TD Dynamique Du Point MatérielpcprepasPas encore d'évaluation
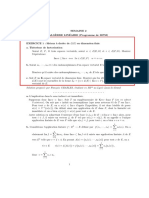
- 1. Montrer que la forme différentielle suivante est exacte: δω = 2xydx + x dy 2. Quel est la fonction V (x,y) telle que δω = -dVDocument4 pages1. Montrer que la forme différentielle suivante est exacte: δω = 2xydx + x dy 2. Quel est la fonction V (x,y) telle que δω = -dVMdzayd EL FahimePas encore d'évaluation
- Cours PC Chap3NVDocument7 pagesCours PC Chap3NValmerPas encore d'évaluation
- 2013 MP CCP Physique I-CorrigéDocument10 pages2013 MP CCP Physique I-CorrigéLarbi Badrour50% (2)
- TD2 CinematiqueDocument3 pagesTD2 CinematiquemedPas encore d'évaluation
- Examen S6 (2018)Document2 pagesExamen S6 (2018)lolobs100% (1)
- Formulaire de Mécanique PDFDocument1 pageFormulaire de Mécanique PDFjbcharpePas encore d'évaluation
- Physique Centrale MP 2012 Corrigé 1Document7 pagesPhysique Centrale MP 2012 Corrigé 1elhaffarisoumia123Pas encore d'évaluation
- TD1 3ER +solutionDocument6 pagesTD1 3ER +solutionBrahimPas encore d'évaluation
- UntitledDocument3 pagesUntitledBelkacem SebtiPas encore d'évaluation
- IE42009 CorrigeDocument1 pageIE42009 CorrigeredaPas encore d'évaluation
- TD 3 CinemaTiqueDocument15 pagesTD 3 CinemaTiqueMohamed OuladPas encore d'évaluation
- TDDocument6 pagesTDYassir Ez-znafryPas encore d'évaluation
- Chapitre DynamiqueDocument17 pagesChapitre DynamiqueCrazy ytPas encore d'évaluation
- Systemes Lineaires CorrigesDocument2 pagesSystemes Lineaires Corrigesthe knowledge is powerPas encore d'évaluation
- Colle 04Document1 pageColle 04NOUREDDINE OUSAIDPas encore d'évaluation
- Un Ballon Qui A La Banane - ImpDocument6 pagesUn Ballon Qui A La Banane - ImpNOUREDDINE OUSAIDPas encore d'évaluation
- DS N1 - CorrigéDocument5 pagesDS N1 - CorrigéNOUREDDINE OUSAIDPas encore d'évaluation
- 11 - Exercices VenturiDocument2 pages11 - Exercices Venturiعبد العزيز مروىPas encore d'évaluation
- CNC 2017Document12 pagesCNC 2017Has SaadaouiPas encore d'évaluation
- F PIVOTDocument4 pagesF PIVOTNOUREDDINE OUSAIDPas encore d'évaluation
- These Zegai Doctorat Ett 2017-2018Document181 pagesThese Zegai Doctorat Ett 2017-2018Marya Ait IshaPas encore d'évaluation
- Regimes Torrentiel FluvialDocument2 pagesRegimes Torrentiel FluvialchoaybPas encore d'évaluation
- CHAPITRE 1 Les OndesDocument12 pagesCHAPITRE 1 Les Ondesmanarlamghari003Pas encore d'évaluation
- Enspm Fi: Formation Ingenieurs She Sonatrach AvalDocument73 pagesEnspm Fi: Formation Ingenieurs She Sonatrach AvalLaissoub NabilPas encore d'évaluation
- MSOST 1 6 C2 MF Principe de Fonctionnement D'un Capteur D'un Codeur D'un DétecteurDocument3 pagesMSOST 1 6 C2 MF Principe de Fonctionnement D'un Capteur D'un Codeur D'un Détecteureb rychessePas encore d'évaluation
- Marc-Aurèle Massard - Maths BCPST 1re Année (J'assure Aux Concours) (French Edition) - Dunod (2017)Document495 pagesMarc-Aurèle Massard - Maths BCPST 1re Année (J'assure Aux Concours) (French Edition) - Dunod (2017)Erick TetsadjioPas encore d'évaluation
- 19 20 S4Document1 page19 20 S4pallap palPas encore d'évaluation
- La Soustraction Grandeurs MesurablesDocument20 pagesLa Soustraction Grandeurs MesurablesMaotto BECHIEPas encore d'évaluation
- Rotation 3ème MathématiquesDocument3 pagesRotation 3ème MathématiquesGhofran NahdiPas encore d'évaluation
- CP Trans VecteursDocument3 pagesCP Trans VecteursYassine El KassirPas encore d'évaluation
- En PC Biof 2008 SNDocument6 pagesEn PC Biof 2008 SNEL MEHDI EL HAMDOUCHIPas encore d'évaluation
- Modélisation Et Étude Des Réseaux ÉlectriquesDocument36 pagesModélisation Et Étude Des Réseaux Électriquesfarid saadPas encore d'évaluation
- Electromagnétisme Dans Le Vide PDFDocument20 pagesElectromagnétisme Dans Le Vide PDFsatoufPas encore d'évaluation
- Proba Ipeit PDFDocument14 pagesProba Ipeit PDFanon_340181204Pas encore d'évaluation
- Sommes Doubles FiniesDocument3 pagesSommes Doubles FiniesIbrahimPas encore d'évaluation
- Solaire À Concentration, Du Présent Au Futur: Gilles FlamantDocument37 pagesSolaire À Concentration, Du Présent Au Futur: Gilles FlamantYou MajPas encore d'évaluation
- 12 001 Thermo Break BE FRDocument8 pages12 001 Thermo Break BE FRMimou ZeraPas encore d'évaluation
- 7.1 Cours À Remplir FONCTION 3eme Janv2022Document3 pages7.1 Cours À Remplir FONCTION 3eme Janv2022Marguerite DuncanPas encore d'évaluation
- TopologieDocument28 pagesTopologieFranck arnaultPas encore d'évaluation
- Laplace TPDocument4 pagesLaplace TPHanine HmidaPas encore d'évaluation
- Porteurs ChaudsDocument17 pagesPorteurs ChaudsAyoub RajaPas encore d'évaluation
- Criteres D'acceptation - Radiographie - API 1104Document1 pageCriteres D'acceptation - Radiographie - API 1104Karim HADDADPas encore d'évaluation
- GCI-200 Enonce L2Document10 pagesGCI-200 Enonce L2GBA65Pas encore d'évaluation
- Lois de Composition InterneDocument3 pagesLois de Composition InterneAhlam El BechariPas encore d'évaluation
- GUIA Imad Eddine PFE - Diagnostic Des Machines Asynchrones A Cage D'écureuilDocument79 pagesGUIA Imad Eddine PFE - Diagnostic Des Machines Asynchrones A Cage D'écureuilImad EddinePas encore d'évaluation
- TD FormesBilineairesQuadratiquesDocument7 pagesTD FormesBilineairesQuadratiquesArthur MoloPas encore d'évaluation
- ComposantsPassifs MultonDocument91 pagesComposantsPassifs MultontittouPas encore d'évaluation
- PC 2nd C - P1 Le MouvementDocument13 pagesPC 2nd C - P1 Le MouvementPina Spk100% (1)
- Calcul de VitessesDocument2 pagesCalcul de VitessesOualid OuadoudiPas encore d'évaluation