Vous aimerez peut-être aussi
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Initiation Aux ProbabilitésDocument468 pagesInitiation Aux ProbabilitésBrondon Pagou100% (5)
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- TD3 TZ FT CorrigéDocument6 pagesTD3 TZ FT CorrigéSàmi Bm50% (2)
- Dynamique: Les Grands Articles d'UniversalisD'EverandDynamique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Utilisation Ms ProjetDocument0 pageUtilisation Ms ProjetmawooaPas encore d'évaluation
- Genie Civil QuestionsDocument11 pagesGenie Civil QuestionsSoufiane Ouaadidy67% (6)
- Examen Ratt 2019 - Corrigé TypeDocument5 pagesExamen Ratt 2019 - Corrigé TypeTOGBE Mismadji sosthènePas encore d'évaluation
- Exercices Corriges Application Lineaire Et Determinants PDFDocument85 pagesExercices Corriges Application Lineaire Et Determinants PDFkoumaPas encore d'évaluation
- Chapitre 4 Champ MagnétiqueDocument2 pagesChapitre 4 Champ MagnétiqueBeatrice Florin100% (2)
- Exercises Applications Linéaires, Matrices, DéterminantsDocument18 pagesExercises Applications Linéaires, Matrices, DéterminantsDANHOUNDO RÉMI100% (1)
- CYPECAD Conception Et PresentationDocument7 pagesCYPECAD Conception Et PresentationSara SARAHPas encore d'évaluation
- ClassicLadder - Tutoriel PDFDocument15 pagesClassicLadder - Tutoriel PDFPierre MarechalPas encore d'évaluation
- ANALYSE DESCENDANT (Ex)Document4 pagesANALYSE DESCENDANT (Ex)Med FilaliPas encore d'évaluation
- TD1 - CorrectionDocument19 pagesTD1 - Correctionfrançois lutorPas encore d'évaluation
- TD01 05 - Ajustement de Courbes Et Séries ChronologiquesDocument45 pagesTD01 05 - Ajustement de Courbes Et Séries ChronologiquesGeorges Keynes LorentzPas encore d'évaluation
- Traqueur Du Soleil (Corrigé)Document5 pagesTraqueur Du Soleil (Corrigé)bhasalma220Pas encore d'évaluation
- Serie 11 1 Bac SCM La Dérivation 1Document3 pagesSerie 11 1 Bac SCM La Dérivation 1Taha KarmimPas encore d'évaluation
- Corrigé Examen PST - 10 Février 2022Document4 pagesCorrigé Examen PST - 10 Février 2022mayar mimiPas encore d'évaluation
- 2.TRAVAUX DIRIGEE DE PROBABILITE Version EnseignantDocument14 pages2.TRAVAUX DIRIGEE DE PROBABILITE Version EnseignantGhislain Saturnin BayouPas encore d'évaluation
- La ContiniutéDocument2 pagesLa ContiniutéJalil ElmouPas encore d'évaluation
- MECA2 - Révisions - Fiche - MéthodesDocument5 pagesMECA2 - Révisions - Fiche - Méthodessalmaamane68Pas encore d'évaluation
- Simu - Dérivation Euler - DS3 - SujetDocument12 pagesSimu - Dérivation Euler - DS3 - SujetIzzadine Alkhali MassarPas encore d'évaluation
- TD1 - CorrectionDocument17 pagesTD1 - Correctionmohamdalla46Pas encore d'évaluation
- Rappel VA 24Document9 pagesRappel VA 24MD HM BCPas encore d'évaluation
- TP-rev - Matrices - Bielle M Manivelle - SujetDocument5 pagesTP-rev - Matrices - Bielle M Manivelle - Sujetshayma MensiPas encore d'évaluation
- ANSérie 1Document2 pagesANSérie 1abahawi07Pas encore d'évaluation
- TD1 Résolution de Systèmes D'équations LinéairesDocument2 pagesTD1 Résolution de Systèmes D'équations Linéairesjouhaina nasri100% (1)
- La Marche Aléatoire TIPE T PDFDocument5 pagesLa Marche Aléatoire TIPE T PDFYoussef El FahimePas encore d'évaluation
- Exercice Algeber SSSFFRRDocument76 pagesExercice Algeber SSSFFRRhhhhhgPas encore d'évaluation
- Exercices Corriges Application Lineaire Et DeterminantsDocument85 pagesExercices Corriges Application Lineaire Et DeterminantsMouhamadou Ahmadou Diallo100% (2)
- Représentation D'images Et Vidéos - RemovedDocument18 pagesReprésentation D'images Et Vidéos - RemovedAmira HachemiPas encore d'évaluation
- PDF de Izadine mp2Document78 pagesPDF de Izadine mp2Béchir Soumaine HisseinPas encore d'évaluation
- Corrige-Iford Voie A 2019 Maths PDFDocument6 pagesCorrige-Iford Voie A 2019 Maths PDFChancelin KeukouaPas encore d'évaluation
- TPMCC Auriol Idriss ElliottDocument13 pagesTPMCC Auriol Idriss Elliottoteme Mbella King DuclairPas encore d'évaluation
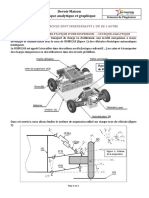
- DM Statique Analytique GraphiqueDocument5 pagesDM Statique Analytique GraphiqueFlav MPas encore d'évaluation
- °°cours Mecanique Solide Fsa-Agadir SMP3 20-21 PDFDocument37 pages°°cours Mecanique Solide Fsa-Agadir SMP3 20-21 PDFAkerkouch OmarPas encore d'évaluation
- Corrigé Examen de Remplacement PST (L3) 22 Féveier 2022Document3 pagesCorrigé Examen de Remplacement PST (L3) 22 Féveier 2022mayar mimiPas encore d'évaluation
- Solution+Examen Mécanique Du Solide 2023Document4 pagesSolution+Examen Mécanique Du Solide 2023King Strong BoyPas encore d'évaluation
- DS2 SLDDocument13 pagesDS2 SLDanna.lux2001Pas encore d'évaluation
- TD7 PDFDocument5 pagesTD7 PDFNarjiss ShimiPas encore d'évaluation
- Série1 Automatique 23 24Document4 pagesSérie1 Automatique 23 24mehdibenkalia5Pas encore d'évaluation
- 1erec Sequence3Document2 pages1erec Sequence3JOEL LOICPas encore d'évaluation
- AE1 Panier Réussi Correction EleveDocument5 pagesAE1 Panier Réussi Correction ElevekandedianissyPas encore d'évaluation
- TD 5 Base Des Regles Et Inference Floues Avec Solution PartielleDocument3 pagesTD 5 Base Des Regles Et Inference Floues Avec Solution PartiellechihaPas encore d'évaluation
- Chap - I - Moment Cinètique (Enregistrement Automatique)Document16 pagesChap - I - Moment Cinètique (Enregistrement Automatique)Wissal RoumayssaePas encore d'évaluation
- Cours Mécanique Quantique L2 Chap 2 NewDocument13 pagesCours Mécanique Quantique L2 Chap 2 NewFabrice ArriaPas encore d'évaluation
- Chap1 TOPOLOGIEDocument27 pagesChap1 TOPOLOGIEsamba4169Pas encore d'évaluation
- Solution-Examen1 Mécanique Des Fluides ApprofondieDocument2 pagesSolution-Examen1 Mécanique Des Fluides ApprofondieBrice GamintePas encore d'évaluation
- Serie 4 Fonction 1 Bac SC MathDocument3 pagesSerie 4 Fonction 1 Bac SC MathHoudaPas encore d'évaluation
- Projet AsservissementDocument15 pagesProjet Asservissementagboyibo jeremiePas encore d'évaluation
- Outils Mathématiques Pour La PhysiqueDocument3 pagesOutils Mathématiques Pour La Physiquevnguema8Pas encore d'évaluation
- Épreuve de Mathématiques - Durée: 4 Heures: 2 Bac Blanc (Décembre 2022)Document2 pagesÉpreuve de Mathématiques - Durée: 4 Heures: 2 Bac Blanc (Décembre 2022)arsene BATAWUILAPas encore d'évaluation
- ST 2an19 s3 Emd Physique2013Document8 pagesST 2an19 s3 Emd Physique2013ibtihal RNPas encore d'évaluation
- Cours GE1 S2Document24 pagesCours GE1 S2Elhabib ElkhotfiPas encore d'évaluation
- Serie 04 001Document2 pagesSerie 04 001amjad amjadPas encore d'évaluation
- Colle - 2 - SujetDocument4 pagesColle - 2 - SujetMarieme BoutraihPas encore d'évaluation
- Cours Math 3 en ProgressionDocument19 pagesCours Math 3 en Progressionfazfrito lacaviataPas encore d'évaluation
- TP14Document5 pagesTP14Khaled AlouiniPas encore d'évaluation
- TD 2 MMCDocument3 pagesTD 2 MMCsouhayb elmanssouriPas encore d'évaluation
- TD-4 - Cinématique Des Solides Et Des SystèmesDocument3 pagesTD-4 - Cinématique Des Solides Et Des Systèmesjaberhouda29Pas encore d'évaluation
- Génie Civil Et Const - CMI MGCE S5 2022-2023Document15 pagesGénie Civil Et Const - CMI MGCE S5 2022-2023khaoulaelamine50Pas encore d'évaluation
- TD4 Cinã©matiqueDocument2 pagesTD4 Cinã©matiqueSaad JebbariPas encore d'évaluation
- Algorithme de dessin de ligne: Maîtriser les techniques de rendu d’images de précisionD'EverandAlgorithme de dessin de ligne: Maîtriser les techniques de rendu d’images de précisionPas encore d'évaluation
- Interpolation bilinéaire: Amélioration de la résolution et de la clarté de l'image grâce à l'interpolation bilinéaireD'EverandInterpolation bilinéaire: Amélioration de la résolution et de la clarté de l'image grâce à l'interpolation bilinéairePas encore d'évaluation
- EVOLAP - Elements de CorrectionDocument2 pagesEVOLAP - Elements de CorrectionMed FilaliPas encore d'évaluation
- TD11 1Document3 pagesTD11 1Med FilaliPas encore d'évaluation
- TD10Document17 pagesTD10Med FilaliPas encore d'évaluation
- ClasseurTP1 Niveau 1Document6 pagesClasseurTP1 Niveau 1Med FilaliPas encore d'évaluation
- Mécanismes Vitesses Et Accélération - Lois Entrée/sortie: Liaisons ÉquivalentesDocument7 pagesMécanismes Vitesses Et Accélération - Lois Entrée/sortie: Liaisons ÉquivalentesMed FilaliPas encore d'évaluation
- Catalogue Logiciels 2014Document32 pagesCatalogue Logiciels 2014Med FilaliPas encore d'évaluation
- TCP-05-Projection-Orthogonale P 44Document1 pageTCP-05-Projection-Orthogonale P 44Med FilaliPas encore d'évaluation
- CPI2-INDUS-TD-cotation GPS Verin LVMDocument5 pagesCPI2-INDUS-TD-cotation GPS Verin LVMMed FilaliPas encore d'évaluation
- Rep-Contôle N°01 - TCPI - 2016-2017Document2 pagesRep-Contôle N°01 - TCPI - 2016-2017Med FilaliPas encore d'évaluation
- DC2 4ScT (18-19)Document13 pagesDC2 4ScT (18-19)Med FilaliPas encore d'évaluation
- TCP-06-Terminologies Formes P 45-51Document7 pagesTCP-06-Terminologies Formes P 45-51Med FilaliPas encore d'évaluation
- La Loi D Ohm Cours 1Document7 pagesLa Loi D Ohm Cours 1Med FilaliPas encore d'évaluation
- La Loi D Ohm Corrige Serie D Exercices 1Document5 pagesLa Loi D Ohm Corrige Serie D Exercices 1Med FilaliPas encore d'évaluation
- La Loi D Ohm Exercices Non Corriges 1Document1 pageLa Loi D Ohm Exercices Non Corriges 1Med FilaliPas encore d'évaluation
- La Loi D Ohm Serie D Exercices 1Document3 pagesLa Loi D Ohm Serie D Exercices 1Med Filali100% (1)
- La Loi D Ohm Cours 3Document8 pagesLa Loi D Ohm Cours 3Med FilaliPas encore d'évaluation
- La Loi D Ohm Cours 4Document3 pagesLa Loi D Ohm Cours 4Med FilaliPas encore d'évaluation
- La Loi D Ohm Cours 2Document4 pagesLa Loi D Ohm Cours 2Med FilaliPas encore d'évaluation
- La Loi D Ohm Cours 6Document2 pagesLa Loi D Ohm Cours 6Med FilaliPas encore d'évaluation
- La Loi D Ohm Cours 5Document3 pagesLa Loi D Ohm Cours 5Med FilaliPas encore d'évaluation
- Cours FFT!!!!!!!!Document9 pagesCours FFT!!!!!!!!tichatataPas encore d'évaluation
- MEMOIRE. Thème. Etudes Des Coincements Dans La Phase (16 - ) Dans Le Champ D Oued Mya (Cas Puits SLB-1)Document85 pagesMEMOIRE. Thème. Etudes Des Coincements Dans La Phase (16 - ) Dans Le Champ D Oued Mya (Cas Puits SLB-1)boumali100% (1)
- J.marnAOUI Guide at Métamorphisme Partie 1Document19 pagesJ.marnAOUI Guide at Métamorphisme Partie 1Marnaoui ZinebPas encore d'évaluation
- Côté Cours QoS V1.1Document27 pagesCôté Cours QoS V1.1Boutheina Ezzine100% (1)
- Chapitre 09 Cinétique Cours Chimie Générale 1ere Année Pharmacie DR BOUMAZADocument10 pagesChapitre 09 Cinétique Cours Chimie Générale 1ere Année Pharmacie DR BOUMAZAMerzougui MoufidaPas encore d'évaluation
- Draft Otf Assainissement - Avril 2023Document93 pagesDraft Otf Assainissement - Avril 2023GueuPas encore d'évaluation
- Hadj Ali, JugurtaDocument114 pagesHadj Ali, JugurtaMustaphaPas encore d'évaluation
- Operations Sur Les Nombres en Ecriture Fractionnaire PDFDocument6 pagesOperations Sur Les Nombres en Ecriture Fractionnaire PDFAlae dine GamerPas encore d'évaluation
- Examen - 2020-2021Document9 pagesExamen - 2020-2021Med Aziz Ben YoussefPas encore d'évaluation
- C4 CristallographieDocument20 pagesC4 CristallographieAIT TAHAR NeilaPas encore d'évaluation
- Compte Rendu de Formation Lte: Optimization and Performance ManagementDocument27 pagesCompte Rendu de Formation Lte: Optimization and Performance ManagementTraore IbrahimPas encore d'évaluation
- P887 PDFDocument1 pageP887 PDFAndreas ShetumeankPas encore d'évaluation
- Fiche (Livre) - Préface À La Seconde Édition - Critique de La Raison Pure, KantDocument4 pagesFiche (Livre) - Préface À La Seconde Édition - Critique de La Raison Pure, KantAudrey L.Pas encore d'évaluation
- 06 Oscillateurs Td-CorrigeDocument10 pages06 Oscillateurs Td-Corrigeaissatou dia gayePas encore d'évaluation
- Chapitre 1. Mesures, Grandeurs Et IncertitudesDocument22 pagesChapitre 1. Mesures, Grandeurs Et IncertitudesToufik TrbPas encore d'évaluation
- Série TZDocument4 pagesSérie TZkhawlaPas encore d'évaluation
- Cours Algorithmique 1STI2DDocument6 pagesCours Algorithmique 1STI2DAmouna AmounaPas encore d'évaluation
- 2bex 03 Suites Sr4Fr AmmariDocument1 page2bex 03 Suites Sr4Fr AmmariACHRAF DOUKARNEPas encore d'évaluation
- Feinguss ListeDocument7 pagesFeinguss Listeمحمد الأمين شرفاويPas encore d'évaluation
- Protocole Radio MobileDocument5 pagesProtocole Radio MobileFoued MbarkiPas encore d'évaluation
- TD 2 de Chimie Des SolutionsDocument2 pagesTD 2 de Chimie Des SolutionsYuga SlmPas encore d'évaluation
- 23 1spe G dst1BDocument3 pages23 1spe G dst1BnasrotesnimePas encore d'évaluation
- CH07 Fcts Circulaires ReciproquesDocument11 pagesCH07 Fcts Circulaires ReciproquesPatrick NgakouPas encore d'évaluation
- Chap 3 Intro FIPDocument5 pagesChap 3 Intro FIPzakariaoo zakariaPas encore d'évaluation