Vous aimerez peut-être aussi
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- DEVOIR ConditionneursDocument3 pagesDEVOIR ConditionneursOussama Khouribache100% (1)
- 0 Cours ConvertisseurDocument24 pages0 Cours ConvertisseurHouda GuedriPas encore d'évaluation
- C9 Chap2Document18 pagesC9 Chap2ziyad gnaouiPas encore d'évaluation
- Cours ElpDocument205 pagesCours Elpjuniorkoffikouame7Pas encore d'évaluation
- Chapitre 1Document16 pagesChapitre 1Nassima ZafiriPas encore d'évaluation
- LavaboDocument127 pagesLavaboESAIE BadoloPas encore d'évaluation
- 07 Convertisseurs Statiques Élève PDFDocument7 pages07 Convertisseurs Statiques Élève PDFi kPas encore d'évaluation
- Screenshot 2022-08-24 at 21.01.06Document168 pagesScreenshot 2022-08-24 at 21.01.06Razack SawadogoPas encore d'évaluation
- Cours Convertisseur StatiqueDocument34 pagesCours Convertisseur Statiquerachida zounaibiPas encore d'évaluation
- PFE Onduleur HacheurDocument40 pagesPFE Onduleur HacheurYouness Talbi100% (1)
- Electronique de PuissanceDocument101 pagesElectronique de Puissanceirenedusabe95Pas encore d'évaluation
- Composants ElectroniquesDocument33 pagesComposants ElectroniquesJosué LamkoandéPas encore d'évaluation
- Cour D'électronique de Puissance MrGE1A OkDocument92 pagesCour D'électronique de Puissance MrGE1A OkDominique ENZANZAPas encore d'évaluation
- ELC de La Puissance 1Document5 pagesELC de La Puissance 1Abdou SayahPas encore d'évaluation
- Cour Hacheur SerieDocument15 pagesCour Hacheur SerieYasser El hamriPas encore d'évaluation
- Com EnPUDocument59 pagesCom EnPUMohamed Taha MESBANEPas encore d'évaluation
- Cours de RemediationDocument43 pagesCours de RemediationKevin ObiangPas encore d'évaluation
- Compte Rendu Des Convertisseurs StatiquesDocument21 pagesCompte Rendu Des Convertisseurs Statiquessakina lahssiniPas encore d'évaluation
- HACHEURSDocument10 pagesHACHEURSSEVERINPas encore d'évaluation
- Cours ENPU IUT 2eme AnneeDocument23 pagesCours ENPU IUT 2eme AnneeAmine AzaoumPas encore d'évaluation
- Electronique de PuissanceDocument72 pagesElectronique de PuissanceAdam Amrani zerrifiPas encore d'évaluation
- Electronique de Puissance-1Document158 pagesElectronique de Puissance-1TWIX111Pas encore d'évaluation
- 2Document13 pages2Zaki AounPas encore d'évaluation
- Chap1 Intro Generale A L'eln de PuissanceDocument10 pagesChap1 Intro Generale A L'eln de Puissancekouassinehemie320Pas encore d'évaluation
- Polycopié Du CoursDocument73 pagesPolycopié Du CoursMehdi Talibi100% (1)
- Convertisseurs de LElectronique de PuissDocument33 pagesConvertisseurs de LElectronique de Puissfarid saadPas encore d'évaluation
- Chapitre N°1 EP-L3Document8 pagesChapitre N°1 EP-L3SaibPas encore d'évaluation
- Ch31 Les Preactionneurs ElectriquesDocument7 pagesCh31 Les Preactionneurs ElectriquesMohamed LarbiPas encore d'évaluation
- Cours - Intr - Redress - Hacheurs - Grad - Ond - 1ère AnnéeDocument28 pagesCours - Intr - Redress - Hacheurs - Grad - Ond - 1ère AnnéeCinquante-deux Le SaoudienPas encore d'évaluation
- Cours Electronique de Puissance L1Document86 pagesCours Electronique de Puissance L1KABOREPas encore d'évaluation
- ch31 Les Preactionneurs Electriques - EtudiantDocument6 pagesch31 Les Preactionneurs Electriques - Etudiantkingmohamedm010Pas encore d'évaluation
- TP Travaux Avant ProjetDocument8 pagesTP Travaux Avant ProjetÑar ĎjesPas encore d'évaluation
- Chap I Les-Preactionneurs-ElectriquesDocument10 pagesChap I Les-Preactionneurs-ElectriquesthafsouthkarimaPas encore d'évaluation
- ch31 Les Preactionneurs ElectriquesDocument7 pagesch31 Les Preactionneurs Electriquesrami kafiPas encore d'évaluation
- Electronique Puissance Chap 1 2Document59 pagesElectronique Puissance Chap 1 2m.azeroualPas encore d'évaluation
- Ca - CCDocument9 pagesCa - CCredouane lotfiPas encore d'évaluation
- 9ème Cours de ELN de PDocument21 pages9ème Cours de ELN de PIbrahim KahlaouiPas encore d'évaluation
- Chapitre 1Document44 pagesChapitre 1el bekkary HajarPas encore d'évaluation
- Onduleurs Et Variation de Vitesse PSIMDocument21 pagesOnduleurs Et Variation de Vitesse PSIMBALLOUK Soufiane94% (17)
- Synthese Des ConvertisseursDocument60 pagesSynthese Des ConvertisseursAmineELAmrani75% (4)
- TP 001Document6 pagesTP 001I don't carePas encore d'évaluation
- 04 - Notes de Cours 3Document27 pages04 - Notes de Cours 3Ahmed KhalilPas encore d'évaluation
- Electronique Puissance M1 Generalites Composants 2021-2022Document38 pagesElectronique Puissance M1 Generalites Composants 2021-2022578qgkpgs2Pas encore d'évaluation
- Chapitre 18 Interruption Tor Du Flux EnergetiqueDocument43 pagesChapitre 18 Interruption Tor Du Flux EnergetiqueKaziiLaggounPas encore d'évaluation
- Electronique de PuissanceDocument12 pagesElectronique de PuissanceN.NASRI Matlablog88% (8)
- Hacheurs LonangDocument10 pagesHacheurs LonangWalter FopaPas encore d'évaluation
- Chapitre 2Document54 pagesChapitre 2lefebvre100% (1)
- Rapport de PFEDocument18 pagesRapport de PFEHassan Ben BoukdirPas encore d'évaluation
- Alementation 220vac To 12vdcDocument12 pagesAlementation 220vac To 12vdcarafakh2Pas encore d'évaluation
- 2660645129Document7 pages2660645129Samir SaidPas encore d'évaluation
- Transformateur ÉlectriqueDocument9 pagesTransformateur ÉlectriqueIsraa MebarkiPas encore d'évaluation
- INTRODUCTIONDocument33 pagesINTRODUCTIONel bekkary HajarPas encore d'évaluation
- Eléments Constitutifs Et Synthèse Des CvsDocument15 pagesEléments Constitutifs Et Synthèse Des CvsSoufiane HazelPas encore d'évaluation
- Modélisation Et Commande Les Convertisseurs DC-DC Et DC-AC2Document26 pagesModélisation Et Commande Les Convertisseurs DC-DC Et DC-AC2Ayache IsmaëlPas encore d'évaluation
- Chapitre 1 - PPTDocument44 pagesChapitre 1 - PPTwail sifourPas encore d'évaluation
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Alementation 220vac To 12vdcDocument12 pagesAlementation 220vac To 12vdcarafakh2Pas encore d'évaluation
- Aop1454 PDFDocument3 pagesAop1454 PDFstefanPas encore d'évaluation
- Cour Techno Le Relais 2 PDFDocument4 pagesCour Techno Le Relais 2 PDFYassine AzougaghPas encore d'évaluation
- Cours - NanotechnologieDocument21 pagesCours - NanotechnologiemonirPas encore d'évaluation
- Mge 00008Document54 pagesMge 00008abdessalam MedjPas encore d'évaluation
- LnaDocument14 pagesLnaFatima STITOUPas encore d'évaluation
- 11-Les Dipoles PassifsDocument9 pages11-Les Dipoles PassifsMouhibi Abdellah100% (2)
- Ondulaut PDFDocument13 pagesOndulaut PDFKarim ZaraiPas encore d'évaluation
- Affichage Lumineux Défilant Commandé Par SMSDocument10 pagesAffichage Lumineux Défilant Commandé Par SMSapi-3722384100% (1)
- TD HacheurMCCDocument2 pagesTD HacheurMCCahmedPas encore d'évaluation
- DS Semiconduceteur 29 10 2015 ENSTABDocument5 pagesDS Semiconduceteur 29 10 2015 ENSTABTunENSTAB100% (4)
- Variateur de Vitesse Pour Moteur MonophaséDocument9 pagesVariateur de Vitesse Pour Moteur MonophaséOmar BoujelbenPas encore d'évaluation
- Syllabus Ge PDFDocument80 pagesSyllabus Ge PDFشهاب الدينPas encore d'évaluation
- Correction Exam Analog1a 2017 2018Document7 pagesCorrection Exam Analog1a 2017 2018Moulaye SalehPas encore d'évaluation
- Toyo Tanso G Catalog FRDocument68 pagesToyo Tanso G Catalog FRJason CarrPas encore d'évaluation
- Semi Conducteurs ENS CachanDocument30 pagesSemi Conducteurs ENS CachanHennzau Code N PlayPas encore d'évaluation
- Les Résistances ÉlectriquesDocument4 pagesLes Résistances Électriquessoufyan100% (1)
- Système MicroprogramesDocument59 pagesSystème MicroprogramesSeVILLA8DzPas encore d'évaluation
- TransistorsDocument16 pagesTransistorsKhadé Ibrahim DroïdPas encore d'évaluation
- Tres Important Lambert Newton Model PDFDocument124 pagesTres Important Lambert Newton Model PDFisl dz100% (1)
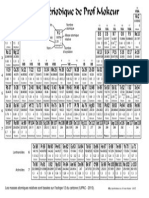
- Tableau Periodique ImprimableDocument1 pageTableau Periodique ImprimableghzialePas encore d'évaluation
- Les Circuits Magnétiques en Régime ImpulsionnelDocument8 pagesLes Circuits Magnétiques en Régime ImpulsionnelBALLOUK Soufiane100% (1)
- Aopl PDFDocument6 pagesAopl PDFTriki BilelPas encore d'évaluation
- Cours TransistorsDocument84 pagesCours Transistorsmael.lemouroux2002Pas encore d'évaluation
- 4 5776260512337627942 PDFDocument9 pages4 5776260512337627942 PDFrdbm rdbmPas encore d'évaluation
- Réseaux D'énergie ÉlectriqueDocument41 pagesRéseaux D'énergie ÉlectriqueAbdelbaki ElfahemPas encore d'évaluation
- Notice CLPEADocument4 pagesNotice CLPEAsellabiPas encore d'évaluation
- Free Energy en Francais Chapter1fDocument57 pagesFree Energy en Francais Chapter1fArmando Jackson100% (2)
- Cours VHDLDocument15 pagesCours VHDLFaycel HamdiPas encore d'évaluation