Vous aimerez peut-être aussi
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Conception automobile: Les Grands Articles d'UniversalisD'EverandConception automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Boite de Vitesses AutomatiqueDocument38 pagesBoite de Vitesses Automatiqueberwolf100% (1)
- 075Document84 pages075jose luis75% (4)
- Embrayage Boite de VitesseDocument7 pagesEmbrayage Boite de VitesseAbdelillah Yamoul100% (1)
- Cours Commun Rail SiemensDocument28 pagesCours Commun Rail SiemensJoão Dantas100% (1)
- Boîte Automatique Á 6 RapportsDocument72 pagesBoîte Automatique Á 6 RapportsKouni Ahmed83% (6)
- Geometrie 2009Document11 pagesGeometrie 2009Mohammed Amine Labbardi100% (1)
- La Boite de VitesseDocument11 pagesLa Boite de VitesseTRIQUEREPas encore d'évaluation
- Conception MoteurDocument10 pagesConception MoteurOualidPas encore d'évaluation
- FRDocument18 pagesFRdory7dawPas encore d'évaluation
- SSP 317 Direction Assistée Électromécanique À Double PignonDocument32 pagesSSP 317 Direction Assistée Électromécanique À Double PignonRomeo BelkoPas encore d'évaluation
- L' Injection électronique: Tutoriel et GuideD'EverandL' Injection électronique: Tutoriel et GuideÉvaluation : 5 sur 5 étoiles5/5 (1)
- Direction Assistee ElectrohydrauliqueDocument28 pagesDirection Assistee Electrohydrauliqueboujbal0% (1)
- VI - Systemes Embarques Automobile PDFDocument12 pagesVI - Systemes Embarques Automobile PDFJoão DantasPas encore d'évaluation
- MUX Et BUS CANDocument34 pagesMUX Et BUS CANJoão Dantas100% (2)
- Fonctionnement D'un MoteurDocument11 pagesFonctionnement D'un MoteurKamyl Azari100% (1)
- Convertisseur de CoupleDocument7 pagesConvertisseur de Couplebrahimessaheby100% (1)
- Boîte de Vitesses RobotiséeDocument5 pagesBoîte de Vitesses Robotiséeblurb100% (1)
- Correction D Examen Du Module POO - C++Document5 pagesCorrection D Examen Du Module POO - C++badr100% (1)
- La Bo Te de Vitesses Automatique (Auto-Innovation)Document15 pagesLa Bo Te de Vitesses Automatique (Auto-Innovation)Sóúlâímâne HâssâníPas encore d'évaluation
- La Boite de Vitesses MA.5Document8 pagesLa Boite de Vitesses MA.5Fabrice DE CARVALHOPas encore d'évaluation
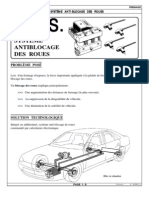
- Système de Sécurité Active ABSDocument14 pagesSystème de Sécurité Active ABSMohamed BouazizPas encore d'évaluation
- Module Cinematique Poids Lourd DPDocument26 pagesModule Cinematique Poids Lourd DPmeziani100% (1)
- Demarreur PDFDocument13 pagesDemarreur PDFibrahim rabbaj100% (1)
- 306 Diesel HDIDocument23 pages306 Diesel HDIJoão DantasPas encore d'évaluation
- Electronic Stability Program: I) L'équilibre Dynamique D'un VéhiculeDocument10 pagesElectronic Stability Program: I) L'équilibre Dynamique D'un Véhiculekiloi gonePas encore d'évaluation
- Rapport TransmissionDocument13 pagesRapport TransmissionTALEB TariqPas encore d'évaluation
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysD'EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysPas encore d'évaluation
- Gen Technique AutomobileDocument17 pagesGen Technique AutomobilepfePas encore d'évaluation
- 18 Boite de VitessesDocument32 pages18 Boite de VitessesMahdi Elgolli100% (2)
- La SuspensionDocument42 pagesLa SuspensionNassim GougamPas encore d'évaluation
- Levée de Soupape VariableDocument20 pagesLevée de Soupape VariableJoão Dantas100% (1)
- Boite AutomatiqueDocument10 pagesBoite AutomatiqueJoão Dantas50% (2)
- Boite Vitesse AutomatiqueDocument62 pagesBoite Vitesse AutomatiqueWissem Othmani100% (1)
- Injecteurs Piezo ElectriquesDocument2 pagesInjecteurs Piezo ElectriquesSofiane HalimiPas encore d'évaluation
- Vehelec Vehhybrid PDFDocument84 pagesVehelec Vehhybrid PDFAbdessattar AbdouPas encore d'évaluation
- Actionneurs en Automobile PRINCIPE ET SIGNAUXDocument36 pagesActionneurs en Automobile PRINCIPE ET SIGNAUXAuto Académie Centre de formation technique100% (3)
- Asigurare FrantaDocument2 pagesAsigurare Frantamuresan paul100% (1)
- TransmissionDocument13 pagesTransmissionchidou100% (1)
- Direction Train Suspension Moyeu Et Pneumatique5 REM TREDocument12 pagesDirection Train Suspension Moyeu Et Pneumatique5 REM TREnawara2005Pas encore d'évaluation
- Embrayage: Aide Au DiagnosticDocument32 pagesEmbrayage: Aide Au Diagnosticanis100% (1)
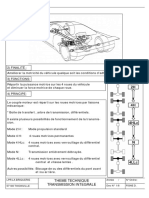
- Transmission Integrale - Bac Pro PDFDocument20 pagesTransmission Integrale - Bac Pro PDFYoucef MimouniPas encore d'évaluation
- VI - Systemes Embarques AutomobileDocument12 pagesVI - Systemes Embarques AutomobileJoão DantasPas encore d'évaluation
- Master VacDocument10 pagesMaster VacSCORSAM1Pas encore d'évaluation
- Bva 8 0D5Document40 pagesBva 8 0D5António Fernandes100% (1)
- Projet Boite de VitesseDocument9 pagesProjet Boite de Vitessepap allPas encore d'évaluation
- VW Eos-Ssp355fDocument62 pagesVW Eos-Ssp355fMichael Fadeur100% (4)
- Controle Tech Mineures PDFDocument14 pagesControle Tech Mineures PDFvolanges eliezer-vanerotPas encore d'évaluation
- Manual Electricidad Audi A4 TdiDocument29 pagesManual Electricidad Audi A4 TdiJosé LuisPas encore d'évaluation
- TransmissionDocument28 pagesTransmissionzaoui MoussaPas encore d'évaluation
- Le Principe de Fonctionnement Moteur 4 TpsDocument10 pagesLe Principe de Fonctionnement Moteur 4 Tpssimover100% (2)
- Soupapes Et Distribution Variable - ValveTronic, VTEC, VVT Etc.Document11 pagesSoupapes Et Distribution Variable - ValveTronic, VTEC, VVT Etc.taline 2020100% (2)
- 06 PDFDocument6 pages06 PDFsoufiane8fkaPas encore d'évaluation
- M 203 Transmission AutomobileDocument29 pagesM 203 Transmission AutomobileAbdo AbdoPas encore d'évaluation
- BM 4 Module Transmission Web 1Document70 pagesBM 4 Module Transmission Web 1Amel Alidra100% (1)
- Boite de VitessesDocument5 pagesBoite de Vitessesartlem1300Pas encore d'évaluation
- Le Système de TransmissionDocument5 pagesLe Système de TransmissionAbdoulaye Boua BERTHEPas encore d'évaluation
- Etude Critique Des Systemes de DirectionDocument8 pagesEtude Critique Des Systemes de DirectionWaktech WakelecPas encore d'évaluation
- At 4.2 1 Embrayage Document de ProfesseurDocument4 pagesAt 4.2 1 Embrayage Document de ProfesseurYounes KaderPas encore d'évaluation
- Afreinage AbsDocument8 pagesAfreinage Absmabrouk2013Pas encore d'évaluation
- 26 Commandes de FreinDocument32 pages26 Commandes de FreinClément GuérinPas encore d'évaluation
- EmbrayageDocument18 pagesEmbrayageKannan MStorePas encore d'évaluation
- Boite Des Vitesses ManuellesDocument25 pagesBoite Des Vitesses ManuellesbrahimessahebyPas encore d'évaluation
- BTS AVA 2002 Distribution VariableDocument17 pagesBTS AVA 2002 Distribution Variablelilaupc100% (1)
- Out Ill AgesDocument16 pagesOut Ill Agessimo kass100% (1)
- 8566738Document48 pages8566738Md AhmedPas encore d'évaluation
- Injection-Essence BacDocument7 pagesInjection-Essence BacJoão DantasPas encore d'évaluation
- Freinage Defaut Et PurgeDocument4 pagesFreinage Defaut Et PurgeLotfi OunissiPas encore d'évaluation
- Transmission-Avec-Transformation de MouvementsDocument17 pagesTransmission-Avec-Transformation de MouvementsZohair RamiPas encore d'évaluation
- Reduct EursDocument5 pagesReduct EursAmine BouatraPas encore d'évaluation
- 25 11 2021 Cours Hydraulique PneumatiqueDocument11 pages25 11 2021 Cours Hydraulique PneumatiqueRodolphe Sounou100% (1)
- TP DIAG A STATeducautoDocument5 pagesTP DIAG A STATeducautoJoão DantasPas encore d'évaluation
- Injection-Essence BacDocument7 pagesInjection-Essence BacJoão DantasPas encore d'évaluation
- Accessoires Indicateurs DirectionDocument8 pagesAccessoires Indicateurs DirectionJoão DantasPas encore d'évaluation
- Injection Regulation-Ralenti Bacpro-StiDocument5 pagesInjection Regulation-Ralenti Bacpro-StiJoão DantasPas encore d'évaluation
- Hella-Manutention Air ConditionneDocument48 pagesHella-Manutention Air ConditionneJoão Dantas100% (1)
- Circuit Hydraulique Common Rail PrésentationDocument48 pagesCircuit Hydraulique Common Rail PrésentationJoão DantasPas encore d'évaluation
- Direction: CaractéristiquesDocument5 pagesDirection: Caractéristiquestoni13021302Pas encore d'évaluation
- Brochure Classe C Coupé & Cabriolet 29-09-2022 PDFDocument21 pagesBrochure Classe C Coupé & Cabriolet 29-09-2022 PDFAnass KharrazPas encore d'évaluation
- Catalogue Option TTS3Document21 pagesCatalogue Option TTS3Régis RenautPas encore d'évaluation
- TraficDocument5 pagesTraficFarouha LifePas encore d'évaluation
- Catalogue Hyundai I20 Nov 22pdfDocument38 pagesCatalogue Hyundai I20 Nov 22pdfEmmanuelPas encore d'évaluation
- Notice Ford C Max Notice D Utilisation, 159,1 PDFDocument309 pagesNotice Ford C Max Notice D Utilisation, 159,1 PDFradoine2014Pas encore d'évaluation
- Revue Technique - Peugeot 307 I - 07bDocument2 pagesRevue Technique - Peugeot 307 I - 07bAntoine SoulPas encore d'évaluation
- Audi A3 '13Document92 pagesAudi A3 '13Mohammed ChenafiPas encore d'évaluation
- Catalogo Mondraker 2014Document104 pagesCatalogo Mondraker 2014bikemtb_netPas encore d'évaluation
- Expose Sur Les AvionsDocument15 pagesExpose Sur Les AvionsSokol BOZANICPas encore d'évaluation
- Convention Sur La Signalisation Routière 0.741.20: Texte OriginalDocument100 pagesConvention Sur La Signalisation Routière 0.741.20: Texte Originalbel lanaPas encore d'évaluation
- XF 480 Euro 6Document4 pagesXF 480 Euro 6Abdelali TalebPas encore d'évaluation
- Dimensionnement D'une Propulsion Hybride de Voilier, Basé Sur La Modélisation Par Les Flux de PuissanceDocument140 pagesDimensionnement D'une Propulsion Hybride de Voilier, Basé Sur La Modélisation Par Les Flux de PuissancePantoja lopesPas encore d'évaluation
- Fiat PDF Manual FR TranslatedDocument1 070 pagesFiat PDF Manual FR Translatedmohamed Jebri100% (2)
- Contrôle Automatique de La Pression Des PneusDocument5 pagesContrôle Automatique de La Pression Des PneusMaxJahnkePas encore d'évaluation
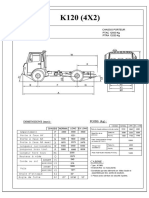
- K120 4x2 2013Document2 pagesK120 4x2 2013AbdouPas encore d'évaluation
- Volume 2Document533 pagesVolume 2Michelle OceanePas encore d'évaluation
- 14 CommercialVehiclesHandbook Ch11 FinalWeb FRDocument14 pages14 CommercialVehiclesHandbook Ch11 FinalWeb FRAssia Oumou MohamedPas encore d'évaluation
- Rapport Autorigin - EK735JXDocument2 pagesRapport Autorigin - EK735JXLaura S. StanPas encore d'évaluation
- Rapport de Stage GHarb Maamoura AutoDocument35 pagesRapport de Stage GHarb Maamoura Automeryem.benmgharPas encore d'évaluation
- Notice 2 Astra TwintopDocument274 pagesNotice 2 Astra TwintopbaPas encore d'évaluation
- დანართი n2 - სატრანსპორტო საშუალებების ჩამონათვალი (ლოტი n10)Document156 pagesდანართი n2 - სატრანსპორტო საშუალებების ჩამონათვალი (ლოტი n10)Giorgi JinashviliPas encore d'évaluation
- Check Liste Pell - ChenilleDocument1 pageCheck Liste Pell - ChenilleAntoine ManongPas encore d'évaluation
- Acheter Ou Vendre Votre Renault 19 ALIZE 1.9DT Neuve Ou D'occasion. Comparez Les Offres Et Obtenez Le Meilleur PrixDocument1 pageAcheter Ou Vendre Votre Renault 19 ALIZE 1.9DT Neuve Ou D'occasion. Comparez Les Offres Et Obtenez Le Meilleur PrixKing GamePas encore d'évaluation