Vous aimerez peut-être aussi
- TD Cinematique 9Document5 pagesTD Cinematique 9Jed MansouriPas encore d'évaluation
- Peugeot Systeme Dinjection Indirecte PeugeotDocument22 pagesPeugeot Systeme Dinjection Indirecte Peugeotjorge Angel Lope100% (1)
- Transmissions Par Poulies Et CourroiesDocument27 pagesTransmissions Par Poulies Et Courroiesjaafar alPas encore d'évaluation
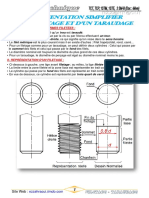
- 05-Notion de FiletageDocument8 pages05-Notion de FiletagedayangPas encore d'évaluation
- Exercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFDocument2 pagesExercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFspectrum660% (1)
- Sec Minesponts 2004 Sic PSIDocument12 pagesSec Minesponts 2004 Sic PSIAlexandre BourrieauPas encore d'évaluation
- DS StatiqueDocument2 pagesDS StatiqueAdil Hassani Idrissi100% (1)
- Cotation Des Trous Et ExerciceDocument1 pageCotation Des Trous Et ExercicerzougarzougaPas encore d'évaluation
- TD-Cinématique: Compresseur ROOTDocument4 pagesTD-Cinématique: Compresseur ROOTGTA5player lucassPas encore d'évaluation
- TD 16 - Liaisons - Schéma CinématiqueDocument4 pagesTD 16 - Liaisons - Schéma Cinématiquebhs channelPas encore d'évaluation
- TD 1 LiaisonsschmacinmatiqueDocument6 pagesTD 1 LiaisonsschmacinmatiqueSamba SallPas encore d'évaluation
- Traction Et Compression Simple FiniDocument10 pagesTraction Et Compression Simple FiniToxic DEVPas encore d'évaluation
- FS Statique Plane Resolution GraphiqueDocument2 pagesFS Statique Plane Resolution Graphiquejsp10Pas encore d'évaluation
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzPas encore d'évaluation
- Systemes Isostatiques PDFDocument5 pagesSystemes Isostatiques PDFImmamHadramyPas encore d'évaluation
- A6LF1 IntroductionDocument62 pagesA6LF1 IntroductionAlvaro Euan94% (33)
- 00 2023 TD Révisions PTSI PTDocument8 pages00 2023 TD Révisions PTSI PTimadbourzamPas encore d'évaluation
- Cine Graph EleveDocument8 pagesCine Graph EleveMohammed DahbiPas encore d'évaluation
- 01 Essui Glace de BusDocument2 pages01 Essui Glace de Busaazz38Pas encore d'évaluation
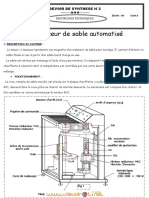
- Devoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagDocument2 pagesDevoir de Contrôle N°3 - Technologie Positionneur - 2ème Sciences (2009-2010) MR ChariagSameh RomdhaniPas encore d'évaluation
- Exosstatiquegraphique PDFDocument3 pagesExosstatiquegraphique PDFSeydou SissokoPas encore d'évaluation
- Cours Cinematique GraphDocument11 pagesCours Cinematique GraphEtienne BouronPas encore d'évaluation
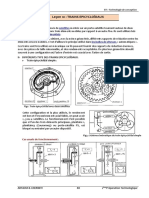
- Train Epicycloidal Simple PDFDocument4 pagesTrain Epicycloidal Simple PDFEdgar ÉtapePas encore d'évaluation
- 32 Loi Entrée Sortie Géométrique D 1Document6 pages32 Loi Entrée Sortie Géométrique D 1hsn frk100% (1)
- PTSI - Cours Liaison HelicoidaleDocument10 pagesPTSI - Cours Liaison HelicoidaleDhibMohamedPas encore d'évaluation
- Corrige Questions Mecanique BisDocument8 pagesCorrige Questions Mecanique BisSidi RachPas encore d'évaluation
- Dossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsDocument3 pagesDossier Réponses Page 1 / 8 Unite de Remplissage de FlaconsMortadha RabahPas encore d'évaluation
- TD Mat Gui 5.1 Tsi1 Tsi2Document5 pagesTD Mat Gui 5.1 Tsi1 Tsi2Adrien LupinPas encore d'évaluation
- Cours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Document8 pagesCours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Youssef CherniPas encore d'évaluation
- Cours EngrenagesDocument12 pagesCours EngrenageszohirPas encore d'évaluation
- Ipeit Ex1 2012Document3 pagesIpeit Ex1 2012JaamesPas encore d'évaluation
- TD Embiellage Moto GraphiqueDocument1 pageTD Embiellage Moto GraphiqueDABAKH LDEEBOY100% (1)
- NnneDocument10 pagesNnneYACOUBA BIYRNPas encore d'évaluation
- Contrôle Corrigé Guidage en RotationDocument3 pagesContrôle Corrigé Guidage en RotationLandry YobouePas encore d'évaluation
- TD 1Document2 pagesTD 1hello 128Pas encore d'évaluation
- APPLICATIONDocument1 pageAPPLICATIONmatozo100% (1)
- TP Treuil ProfDocument6 pagesTP Treuil ProfmidounPas encore d'évaluation
- Numeration EleecDocument21 pagesNumeration EleecSalif NanaPas encore d'évaluation
- CC1 Im1 Ie1 17 18Document1 pageCC1 Im1 Ie1 17 18Hamza Rimi0% (1)
- TD Vis EcrouDocument3 pagesTD Vis EcrouHoussam Had100% (1)
- TP Scie SauteuseDocument5 pagesTP Scie SauteuseremivsnPas encore d'évaluation
- 02 Bac 2008 Contrôle CorrigéDocument12 pages02 Bac 2008 Contrôle CorrigéMohamed AbedPas encore d'évaluation
- Schéma Cinématique Serre-Joint - PpsDocument25 pagesSchéma Cinématique Serre-Joint - PpsErica Franco50% (4)
- Dcn1 2020 3t1 Presse A Sertir CorrectionDocument4 pagesDcn1 2020 3t1 Presse A Sertir CorrectionGuiliassPas encore d'évaluation
- ChainesFermees Applications 01Document4 pagesChainesFermees Applications 01Tigma AarousPas encore d'évaluation
- DEVOIR Porte de GarageDocument5 pagesDEVOIR Porte de GarageSaïd Oumar GbanePas encore d'évaluation
- Devoir Sq8 StatiqueDocument8 pagesDevoir Sq8 StatiqueRuben100% (1)
- Liaison EncastrementDocument18 pagesLiaison Encastrementkhocine100% (1)
- Transmettre 2024 - 2steDocument54 pagesTransmettre 2024 - 2stekhamissbenzPas encore d'évaluation
- Exo Cinematique PerforatriceDocument1 pageExo Cinematique PerforatriceFilaliAbderrahimPas encore d'évaluation
- 2-Corrigé TD Hyperstisme-Mat-ReacteurDocument2 pages2-Corrigé TD Hyperstisme-Mat-ReacteurManel AyebPas encore d'évaluation
- 09 - Trains EpicycloïdauxDocument9 pages09 - Trains EpicycloïdauxOumaimaPas encore d'évaluation
- امتحان علوم المهندسDocument12 pagesامتحان علوم المهندسMoradLeglilPas encore d'évaluation
- CH 01 Introduction Rappels Des AssemblagesDocument7 pagesCH 01 Introduction Rappels Des AssemblagesMohamed Rougab100% (2)
- Cours Composition de Mouvement de Vitesse LvesDocument5 pagesCours Composition de Mouvement de Vitesse LvesziedttPas encore d'évaluation
- 6349 Dossier ReponsesDocument16 pages6349 Dossier Reponsesdid TouzoPas encore d'évaluation
- Devoir de Contrôle N°1 (DT) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotDocument3 pagesDevoir de Contrôle N°1 (DT) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de Robotyassine zitouni100% (1)
- TD de SI - MécaniqueDocument3 pagesTD de SI - MécaniqueArthur TigreatPas encore d'évaluation
- Cinématique GraphiqueDocument4 pagesCinématique GraphiqueDABAKH LDEEBOYPas encore d'évaluation
- StatiqueDocument5 pagesStatiqueAdje EKLOUPas encore d'évaluation
- Mecanisme de Transformation de Mouvement Bielle ManivelleDocument3 pagesMecanisme de Transformation de Mouvement Bielle Manivellesahl silverPas encore d'évaluation
- SERIE TD2 - Cinematique - 2020 2021Document10 pagesSERIE TD2 - Cinematique - 2020 2021Nowe AhmadePas encore d'évaluation
- Exos CinématiqueDocument40 pagesExos Cinématiquehamzasaad615Pas encore d'évaluation
- Cours No.3Document71 pagesCours No.3Wolfpackxx86100% (1)
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDocument5 pagesDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocinePas encore d'évaluation
- Caren FRDocument4 pagesCaren FRriadhPas encore d'évaluation
- + TD Transmission 3 Etude ReducteurDocument3 pages+ TD Transmission 3 Etude ReducteurMahrez ZaafouriPas encore d'évaluation
- الامتحان الوطني في علوم المهندس 2022 مسلك علوم رياضية ب الدورة العاديةDocument28 pagesالامتحان الوطني في علوم المهندس 2022 مسلك علوم رياضية ب الدورة العاديةAnwar Ben LamlihPas encore d'évaluation
- 5571-c Notice FR v36 4x4 Peugeot FR BicDocument32 pages5571-c Notice FR v36 4x4 Peugeot FR BicaymendabPas encore d'évaluation
- M08 - Alimentation Classique - CarburateurDocument7 pagesM08 - Alimentation Classique - CarburateurMustapha BoufousPas encore d'évaluation
- Année 2021Document15 pagesAnnée 2021le gamerrrPas encore d'évaluation
- BON COURS Circuit-De-Demarrage - MiardDocument16 pagesBON COURS Circuit-De-Demarrage - Miardالمركز الخاص بالتكوين المهنيPas encore d'évaluation
- OutillageDocument108 pagesOutillageNico Gt-turbo100% (1)
- Torseurs TD2Document2 pagesTorseurs TD2Rey divino Moukoua100% (1)
- IndicesDocument1 pageIndicesAbdelazie SakerPas encore d'évaluation
- Moteur À Deux TempsDocument2 pagesMoteur À Deux TempsIkram Ait AbdellahPas encore d'évaluation
- BearingQuickReferenceGuide FR WebDocument20 pagesBearingQuickReferenceGuide FR Webabdelhadi houssinPas encore d'évaluation
- 1.3 Control NuméricoDocument5 pages1.3 Control NuméricoEvelin F Gallardo G. GalgPas encore d'évaluation
- CatalogueDocument122 pagesCatalogueMrr OulhamriPas encore d'évaluation
- tp1 Moteur ThermiqueDocument4 pagestp1 Moteur ThermiqueAymen NasrPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 1ère AS (2011-2012) MR Boubaker - Hassen PDFDocument6 pagesDevoir de Synthèse N°1 - Technologie - 1ère AS (2011-2012) MR Boubaker - Hassen PDFAmir AbidPas encore d'évaluation
- SM RoyalDocument26 pagesSM RoyalTomas TelloPas encore d'évaluation
- Compresseur Quartz Prodif v204710 100 Litres 3cvDocument5 pagesCompresseur Quartz Prodif v204710 100 Litres 3cvHendrick PntPas encore d'évaluation
- Chap 2 RoulementsDocument50 pagesChap 2 RoulementsHoussame Naim100% (1)
- Translation1 PDFDocument2 pagesTranslation1 PDFAurelien TegoumoPas encore d'évaluation
- Sujet2 - Bride de SerrageDocument4 pagesSujet2 - Bride de SerrageMohsen Laabidi100% (3)
- M Essence CarburationDocument28 pagesM Essence CarburationAyoub AhmaniPas encore d'évaluation
- Comment Changer - Roulement de Roue Avant Sur VW Golf 3 - Guide de RemplacementDocument27 pagesComment Changer - Roulement de Roue Avant Sur VW Golf 3 - Guide de Remplacementpascal brochardPas encore d'évaluation
- Manuel D'entretien: Série 4000 PerkinsDocument48 pagesManuel D'entretien: Série 4000 PerkinsSounkarou CamaraPas encore d'évaluation
- Les Chambres de CombustionDocument4 pagesLes Chambres de CombustionJérômePas encore d'évaluation