Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- TP Final Dynamique Des MachinesDocument7 pagesTP Final Dynamique Des MachinesDjafar Christophe UmbaPas encore d'évaluation
- ds2 23 24Document7 pagesds2 23 24Zineb AjemPas encore d'évaluation
- 14 TD Sujet - Torseur Cinétique Et Torseur Dynamique PDFDocument5 pages14 TD Sujet - Torseur Cinétique Et Torseur Dynamique PDFHassanbfk BfkPas encore d'évaluation
- Paliers Et Butées Magnétiques PassifsDocument12 pagesPaliers Et Butées Magnétiques PassifsYounis MolayPas encore d'évaluation
- Notion Sur Le Calcul Des RoulementsDocument15 pagesNotion Sur Le Calcul Des RoulementsDuavPas encore d'évaluation
- Arcana PDFDocument16 pagesArcana PDFChristian100% (1)
- Transmission de puissance-FF01Document92 pagesTransmission de puissance-FF01AYA OUEZGANPas encore d'évaluation
- 1.1-Equilibrage Piece TournanteDocument5 pages1.1-Equilibrage Piece Tournanteabdessamad1boussairiPas encore d'évaluation
- RoulementsDocument8 pagesRoulementsred lemPas encore d'évaluation
- Vibrations Des Arbres RotatifsDocument8 pagesVibrations Des Arbres Rotatifshicham-13100% (1)
- Application A La Dynamique RotorDocument229 pagesApplication A La Dynamique RotorNadia DridiPas encore d'évaluation
- DynamiqueDocument23 pagesDynamiqueSaidPas encore d'évaluation
- Analyse Modale de La VibrationDocument21 pagesAnalyse Modale de La VibrationmanalPas encore d'évaluation
- Torseur DynamiqueDocument6 pagesTorseur DynamiqueFelix BonnetPas encore d'évaluation
- Exo 1 Serie 3Document11 pagesExo 1 Serie 3Zack MahmoudiPas encore d'évaluation
- Chap 1 Engrenages PDFDocument8 pagesChap 1 Engrenages PDFousmanePas encore d'évaluation
- 7 Sollicitations ComposéesDocument2 pages7 Sollicitations ComposéesMohsen SaidiPas encore d'évaluation
- UntitledDocument78 pagesUntitledAbdessamad Ben-amarPas encore d'évaluation
- Roulements Simple Rangée ProfDocument14 pagesRoulements Simple Rangée ProfBouattour ChaimaPas encore d'évaluation
- Equilibrage DynamiqueDocument3 pagesEquilibrage DynamiqueMahran GuesmiPas encore d'évaluation
- Cours de Vibrations 2022-2023Document35 pagesCours de Vibrations 2022-2023lounia1011Pas encore d'évaluation
- Guidage en Rotation PDFDocument7 pagesGuidage en Rotation PDFAyyoub BadreddinePas encore d'évaluation
- Chapitre 1 - Notions Fondamentales D'équilibrageDocument14 pagesChapitre 1 - Notions Fondamentales D'équilibrageSayf Bouyedda100% (1)
- BEMChap3 (Vilebrequin 1 Contraintes) PDFDocument9 pagesBEMChap3 (Vilebrequin 1 Contraintes) PDFTriki BilelPas encore d'évaluation
- 8bis EquilibrageDocument20 pages8bis EquilibrageNassim Gougam100% (1)
- Chapitre 3-Modélisation Des Rotors Flexibles Par Éléments FinisDocument11 pagesChapitre 3-Modélisation Des Rotors Flexibles Par Éléments FinisToksik MaddePas encore d'évaluation
- Guidage en Rotation TsDocument7 pagesGuidage en Rotation TscissePas encore d'évaluation
- Cinematique Transmission de PuissanceDocument22 pagesCinematique Transmission de Puissancepierre blanchinPas encore d'évaluation
- Cour DMT M2 FMPDocument32 pagesCour DMT M2 FMPʚǐɞ Zõlã ʚǐɞPas encore d'évaluation
- DS4 SujetDocument8 pagesDS4 SujetPierre BeckPas encore d'évaluation
- Act (Fraiseuse Universelle) P137-142Document6 pagesAct (Fraiseuse Universelle) P137-142Kereme JulienPas encore d'évaluation
- ZINE RDM Cours Et TDs GIM 1 PDFDocument45 pagesZINE RDM Cours Et TDs GIM 1 PDFZAKARIA BOUKILPas encore d'évaluation
- Matrice D'inertieDocument4 pagesMatrice D'inertieJean AbelaPas encore d'évaluation
- Equilibrage Statique Et Dynamique Des Machines RotativesDocument9 pagesEquilibrage Statique Et Dynamique Des Machines RotativesKader DziriPas encore d'évaluation
- Examen Corrige Rattrapage 2017 GCDocument4 pagesExamen Corrige Rattrapage 2017 GCTps TaquillaPas encore d'évaluation
- Constructionmecanique 2!23!24Document89 pagesConstructionmecanique 2!23!24Dhiflaoui SaifPas encore d'évaluation
- Chapitre 2 - Equilibrage StatiqueDocument10 pagesChapitre 2 - Equilibrage StatiqueSayf Bouyedda100% (1)
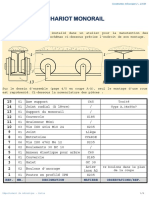
- CH4 - Application - Chariot Monorail PDFDocument5 pagesCH4 - Application - Chariot Monorail PDFYasser Napoli100% (1)
- Équilibrage Des Solides Tournants Profs PDFDocument8 pagesÉquilibrage Des Solides Tournants Profs PDFfitasmounirPas encore d'évaluation
- Cours Vibrations Chapitres1-8 VF CpressedDocument153 pagesCours Vibrations Chapitres1-8 VF CpressedMohamed CoulibalyPas encore d'évaluation
- Poulies Et CourroiesDocument4 pagesPoulies Et CourroiesBouabdellaoui saif ennasrPas encore d'évaluation
- Ni 92252047Document40 pagesNi 92252047OncstGabesPas encore d'évaluation
- Exercice Telecabine v2Document4 pagesExercice Telecabine v2Ma HdiPas encore d'évaluation
- 7 - AccouplementsDocument12 pages7 - Accouplementsamandoh leonelPas encore d'évaluation
- Roulements PréchargésDocument27 pagesRoulements PréchargésYounessElkarkouriPas encore d'évaluation
- Chapitre 2 - Pression de Contact LocaliséeDocument11 pagesChapitre 2 - Pression de Contact Localiséeسيف الدين يعقوبيPas encore d'évaluation
- Dossier Tech Mouv VibratoireDocument52 pagesDossier Tech Mouv Vibratoireabdelwahab mahdhiPas encore d'évaluation
- Conception D'un Joint de CardonDocument2 pagesConception D'un Joint de CardonDhia AyadiPas encore d'évaluation
- Cours RoulementsDocument5 pagesCours RoulementssemahPas encore d'évaluation
- InterchangeabilitéDocument12 pagesInterchangeabilitéFerroum SamirPas encore d'évaluation
- Chapitre 3Document19 pagesChapitre 3Chaoune MedPas encore d'évaluation
- TC600 - F SPINNERDocument12 pagesTC600 - F SPINNERKali AbdennourPas encore d'évaluation
- SynchronisationDocument14 pagesSynchronisationquereurPas encore d'évaluation
- Tribologie: Master II Ingénierie MécaniqueDocument4 pagesTribologie: Master II Ingénierie MécaniqueDjamel DjamPas encore d'évaluation
- Biell ManivelDocument2 pagesBiell ManivelMagri MohamadPas encore d'évaluation
- Mecalagr TDDocument11 pagesMecalagr TDAmn Elec EsiPas encore d'évaluation
- B22 Limiteurs CoupleDocument3 pagesB22 Limiteurs CouplentayoubPas encore d'évaluation
- Correction Examen AMVENITDocument4 pagesCorrection Examen AMVENITzaidifaroukPas encore d'évaluation
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceD'EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficacePas encore d'évaluation
- TD3 Cine 2017Document2 pagesTD3 Cine 2017Zaineb AbbadPas encore d'évaluation
- Cours Mecanique IndustrielleDocument341 pagesCours Mecanique IndustrielleMohamed ElharouchPas encore d'évaluation
- 06 Cours Theoriques Professionnels - 2020Document2 pages06 Cours Theoriques Professionnels - 2020AekDzLaiPas encore d'évaluation
- Gestion Des DasDocument31 pagesGestion Des DasAekDzLaiPas encore d'évaluation
- Maladies Professionnelles Du Chirurgien DentisteDocument7 pagesMaladies Professionnelles Du Chirurgien DentisteAekDzLaiPas encore d'évaluation
- Binder 1Document119 pagesBinder 1AekDzLaiPas encore d'évaluation
- TitroLine-6000 7000 EnglishDocument88 pagesTitroLine-6000 7000 EnglishAekDzLaiPas encore d'évaluation
- 2006 Bookmatter TechniqueDÉquilibrageDocument16 pages2006 Bookmatter TechniqueDÉquilibrageAekDzLaiPas encore d'évaluation
- GrammaireDocument24 pagesGrammaireAboukikiss KikissPas encore d'évaluation
- Fables de LessingDocument176 pagesFables de LessingAndreas SchoemakerPas encore d'évaluation
- Le Compte Rendu Objectif (4ème Cours)Document5 pagesLe Compte Rendu Objectif (4ème Cours)Khaled KoussaPas encore d'évaluation
- Batt Noëlle - L Expérience DiagrammatiqueDocument24 pagesBatt Noëlle - L Expérience DiagrammatiqueAntón VoyamePas encore d'évaluation
- Grammatik2 Dativ1Document2 pagesGrammatik2 Dativ1loukilichaymae1Pas encore d'évaluation
- INSA Toulouse 1A Mecanique Du Point Examen Mars 2008Document2 pagesINSA Toulouse 1A Mecanique Du Point Examen Mars 2008purplera1n100% (1)
- Questions Article Sous Le RegardDocument3 pagesQuestions Article Sous Le RegardTânia FerreiraPas encore d'évaluation
- Lettre À La Jeunesse 16Document6 pagesLettre À La Jeunesse 16darmandiePas encore d'évaluation
- Doctrine Et Alliances Et Histoire de L'égliseDocument254 pagesDoctrine Et Alliances Et Histoire de L'égliseyogoamor100% (1)
- Lectura - Guilbaut (2005) Introduction À La Linguistique 1Document4 pagesLectura - Guilbaut (2005) Introduction À La Linguistique 1Yisell OsorioPas encore d'évaluation
- Bench MarkingDocument79 pagesBench MarkinglouPas encore d'évaluation
- Corrige Exo16 Inegalite Accroissements FinisDocument4 pagesCorrige Exo16 Inegalite Accroissements FinisIsmaîl TemsamaniPas encore d'évaluation
- Wilhelm Dilthey - WikipédiaDocument27 pagesWilhelm Dilthey - WikipédiaHenri-Williams BanPas encore d'évaluation
- Ap4. Analyse DimensionnelleDocument4 pagesAp4. Analyse DimensionnelleMouhat OuadiaPas encore d'évaluation
- Talren4 Notice TechniqueDocument104 pagesTalren4 Notice TechniqueAnas CheraiPas encore d'évaluation
- La Presentation de Soi Dans Les Sites de Rencontre Sur InternetDocument116 pagesLa Presentation de Soi Dans Les Sites de Rencontre Sur InternetZakaria ChaabiPas encore d'évaluation
- Le Bon UsageDocument7 pagesLe Bon UsageTarik ChouaibisPas encore d'évaluation
- Spiritualité Par Quoi CommencerDocument39 pagesSpiritualité Par Quoi Commencer8hykkfpwgdPas encore d'évaluation
- Elaine Despres - Pourquoi Les Savants Fous Veulent-Ils Detruire Le Monde. Evolution D'une Figure de L'ethique. These de DoctoratDocument526 pagesElaine Despres - Pourquoi Les Savants Fous Veulent-Ils Detruire Le Monde. Evolution D'une Figure de L'ethique. These de DoctoratFrancisco CortazarPas encore d'évaluation
- Kierkegaard, Crainte Et Tremblement PDFDocument117 pagesKierkegaard, Crainte Et Tremblement PDFdarouchka100% (2)
- DROIT PENAL Comparé CoursDocument60 pagesDROIT PENAL Comparé Coursflorine2001Pas encore d'évaluation
- Comprehension de L'ecrit 1Document3 pagesComprehension de L'ecrit 1samoyPas encore d'évaluation
- Le Voile D'isis - 1895-07-31 - 211Document8 pagesLe Voile D'isis - 1895-07-31 - 211kaldeterPas encore d'évaluation
- Fic00002 (Logique ... )Document11 pagesFic00002 (Logique ... )Fadhul Abdouroihamane DjiramePas encore d'évaluation
- Cours de Leadership Unh 23Document102 pagesCours de Leadership Unh 23Gloire NgwejPas encore d'évaluation