Académique Documents
Professionnel Documents
Culture Documents
Rapport de Stage de Fin D'Etude: Alan TENZA GT Promo2003
Transféré par
bahazagoub7Titre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Rapport de Stage de Fin D'Etude: Alan TENZA GT Promo2003
Transféré par
bahazagoub7Droits d'auteur :
Formats disponibles
Association
EURATOM -CEA
RAPPORT DE STAGE DE FIN D’ETUDE
Alan TENZA GT promo2003_____________________________________Page 0 sur 79
Association
EURATOM -CEA
Groupe ESIM CEA Cadarache
Technopôle de Château Gombert 13108 Saint Paul Lez Durance
13451 Marseille cedex 20 Tél : 04 42 25 70 00
Tél : 04 91 05 45 45
RAPPORT DE STAGE DE FIN D’ETUDE
***
Projet de fin d’étude.
Stagiaire : Alan TENZA, troisième année, Génie Thermique.
1030 chemin des Micocouliers
83300 Draguignan
tél. : 06 18 40 68 03
Tuteurs : Giuseppe BOSIA (EURATOM-CEA)
Michel CHATEAUMINOIS (ESIM)
***
Stage du 10 mars au 29 août 2003
Alan TENZA GT promo2003_____________________________________Page 1 sur 79
Association
EURATOM -CEA
REMERCIMENTS
Merci à l’ensemble du Groupe Support Au Chauffage (GSAC) dont
j’ai fait parti, qui m’a permis de rapidement m’intégrer.
Merci à M. Missirlian pour son aide pour mon apprentissage du
logiciel CASTEM, à P. Testoni et K. Vulliez pour leur patience et
leurs conseils, et à mon maître de stage G. Bosia pour son soutien
durant le stage.
Alan TENZA GT promo2003_____________________________________Page 2 sur 79
Association
EURATOM -CEA
RESUME
Le but de ce stage est d’analyser le comportement thermomécanique
des composants d’accord d’impédance d’une antenne particulière.
Cette antenne à pour but de transmettre une puissance sous forme
d’ondes électromagnétiques au plasma d’un réacteur expérimental à
fusion thermonucléaire. Ces antennes travaillent à hautes fréquences
(40 à 60 MHz).
Ces composants d’accord d’impédance sont notamment des
condensateurs. Ils servent à adapter l’impédance du bout de l’antenne
qui envoie l’onde électromagnétique, au plasma. La capacité variable
des condensateurs doit permettre à l’antenne de s’adapter aux
variations de l’impédance du plasma pour éviter la réflexion de l’onde
dans l’antenne.
Après une analyse théorique donnant les ordres de grandeurs des
variables, seront utilisés deux logiciels de simulations par méthode des
éléments finis, pour deux antennes différentes.
- Dans le premier cas, l’étude porte sur un condensateur avec une
géométrie simple, le modèle « end of coax », dont les résultats
sont satisfaisants. Température maximale atteinte en régime
continu de l’ordre de 270 °C, avec un refroidissement actif, soit
par eau (à 1bar, 25°C), soit par hélium (à 10 bars, 50°C).
- Dans le deuxième cas, le condensateur étudié est plus complexe,
l’analyse est notamment plus précise du point de vue
électromagnétique.
Alan TENZA GT promo2003_____________________________________Page 3 sur 79
Association
EURATOM -CEA
SOMMAIRE
Introduction page 6
1. Le contexte page 7
1.1. présentation du CEA page 7
1.1.1. CEA en France page 7
1.1.2. Le site de Cadarache page 8
1.1.3. DRFC page 9
1.2 présentation de la fusion page 11
1.2.1. principes de la fusion page 11
1.2.2. Tore Supra page 13
1.2.3. Le chauffage du plasma page 16
2. Le contexte de ma mission page 17
2.1. Présentation des antennes FCI. page 17
2.1.1. Le système de chauffage IC page 17
2.1.2. Fonctionnement page 19
2.1.3. Le système étudié pendant le stage : les condensateurs page 20
2.2. Ordres de grandeur des paramètres et inconnues du modèle page 23
2.2.1. Aspect électromagnétique du modèle page 23
2.2.2. Aspect thermique page 25
2.2.3. Ordre de grandeur des déformations au niveau des électrodes. page 31
3. Analyse thermique aux éléments finis (FEM) page 33
3.1. Les outils page 33
3.1.1.Logiciel AUTOCAD page 33
3.1.2. Logiciel CASTEM2000 page 34
3.2. Analyse du condensateur « end of coax » (Logiciel CASTEM 2000) page 35
3.2.1. Refroidissement par eau page 36
3.2.1.1. Présentation du système : le condensateur à capacité variable page 36
3.2.1.2. Le refroidissement page 37
3.2.1.3. Formules utilisées et valeurs des grandeurs caractéristiques. page 39
3.2.1.4. Applications numériques page 42
3.2.1.5. Résultats avec CASTEM2000. page 46
Alan TENZA GT promo2003_____________________________________Page 4 sur 79
Association
EURATOM -CEA
3.2.2. Refroidissement par hélium page 49
3.2.2.1. Données thermodynamiques page 50
3.2.2.2. Formules utilisées page 50
3.3. Conclusion, modèle “end of coax” page 52
4. Etude couplée électromagnétique -thermique du modèle
« Proto ITER 2005 » sur ANSYS. page 53
4.1. Présentation d’ANSYS page 54
4.2. Le modèle géométrique page 55
4.2.1.Définitions page 55
4.2.2.Eléments modélisés page 56
4.2.3.Choix de la structure d’analyse page 57
4.3. Modèle Electromagnétique page 58
4.3.1.Conditions, hypothèses. page 58
4.3.2.Résultats page 59
4.3.3.Le couplage page 60
4.4. Modèle Thermique page 60
4.4.1.Description du fonctionnement du système de refroidissement page 61
4.4.2.Calculs du coefficient h page 61
4.4.3.Résultats page 62
4.5. conclusion page 64
Synthèse, bilan du stage. page 65
Références page 66
TABLE DES ANNEXES page 67
Alan TENZA GT promo2003_____________________________________Page 5 sur 79
Association
EURATOM -CEA
INTRODUCTION
En France, les recherches en vue de l’utilisation industrielle de l’énergie de fusion
thermonucléaire sont menées depuis 1959, dans le cadre d'un contrat d'association
EURATOM-CEA au sein du Département de Recherches sur la Fusion Contrôlée.
Depuis son regroupement au centre d’études de Cadarache en 1986, le DRFC exploite après
avoir assuré la construction, l’expérience TORE SUPRA, premier grand tokamak au monde
doté d’un aimant supra conducteur.
Le stage est effectué dans le Service Chauffage et Confinement du Plasma au sein du groupe
Support Au Chauffage. Ce groupe a en charge l’exploitation et le développement des
installations de chauffage par ondes haute fréquence.
Ma mission est d’apprendre la technique de la modélisation aux éléments finis (FEM)
appliquée aux problèmes de transmission de chaleur et d’appliquer la technique FEM à
l’analyse thermomécanique de composants à haute fréquence (HF) qui font partie de
l’antenne ITER Proto 2005 FCI. Prototype de l’antenne est chargé du chauffage du plasma par
ondes électromagnétiques à la fréquence cyclotronique ionique du futur réacteur ITER, et sera
installée pour essais sur le tokamak Tore Supra de Cadarache.
Après la présentation du CEA et de son implication dans la recherche sur la fusion contrôlée,
les antennes FCI et leur principe de fonctionnement sont exposés. Ce qui permet de mettre en
évidence le rôle des condensateurs qui composent l’antenne et qui sont le sujet de l’étude.
Pour être capable de prévoir le fonctionnement de l’antenne il est nécessaire de connaître le
champ de température du système. On peut alors déduire les efforts sur la structure et s’il y a
nécessité de refroidir activement. Ainsi une étude analytique préliminaire est réalisée pour
obtenir les ordres de grandeurs du comportement thermique du système.
L’étude est approfondie avec l’utilisation de deux logiciels d’analyse aux éléments finis.
Deux géométries de condensateur sont analysées, le modèle « end of coax » avec le logiciel
CASTEM, et le modèle ITER Proto 2005 FCI, avec ANSYS.
Les résultats permettront de conclure l’étude en proposant des solutions.
Alan TENZA GT promo2003_____________________________________Page 6 sur 79
Association
EURATOM -CEA
1. LE CONTEXTE
1.1. Présentat ion du CEA
1.1.1. CEA en France
Le Commissariat à l'Énergie Atomique est un établissement public à caractère scientifique,
technique et industriel créé en 1945. Ses missions, récemment redéfinies, concernent la
recherche nucléaire à des fins civiles et militaires, la valorisation industrielle des résultats de
la recherche, tant au niveau régional que national, et la production d'armes nucléaires pour la
Défense. L'action industrielle du C.E.A. est exercée par l'intermédiaire de filiales ou
participations constituant le Groupe industriel C.E.A.
La carte ci dessous nous permet de visualiser l’implantation des différents centres C.E.A sur
le territoire français. Les sites de ces Centres ont été choisis suivant différentes
caractéristiques : niveau de population environnante, proximité de support industriel et de
laboratoire, qualité géologique des sols permettant la construction des différentes installations.
Figure 1.1.1.a : répartition des différents centres CEA en France
Le C.E.A. emploie 16000 personnes environ. Son budget global est de 2 689 Millions
d’euros.
Alan TENZA GT promo2003_____________________________________Page 7 sur 79
Association
EURATOM -CEA
Le C.E.A est organisé en plusieurs secteurs d’activités regroupés sous quatre pôles.
Pôle Défense, Direction des Applications Militaires (DAM)
Pôle Nucléaire, Direction de l’Energie Nucléaire(DEN)
Pôle Recherche Technologique, Direction de la Recherche Technologique(DRT)
Pôle Recherche, Direction des Sciences de la Matière et Direction des Sciences du Vivant
(DSM, DSV).
Un organigramme regroupant ces informations est en annexe 1
Les travaux menés à la DSM sont orientés principalement vers la connaissance intime de la
matière et ses applications. Les domaines étudiés s'étendent à des activités aussi variées que la
physique théorique, la physique nucléaire, l'astrophysique, les applications des rayonnements
et la fusion contrôlée. C’est au sein de cette direction que se trouve le Département de
Recherche sur la Fusion Contrôlée (DRFC).
1.1.2. Le site de Cadarache
Le centre C.E.A CADARACHE, implanté sur le territoire de la commune de Saint Paul Lez
Durance se situe sur la rive ga uche de la Durance à son confluent avec le Verdon. L'ensemble
du site occupe une superficie de 1600 hectares dont 960 sont utilisés pour l'implantation des
constructions ; 30 kilomètres de clôture entourent la partie occupée.
Figure 1.1.2.a : situation géographique de Cadarache.
Alan TENZA GT promo2003_____________________________________Page 8 sur 79
Association
EURATOM -CEA
Le site recherché devait donc répondre à un certain nombre de critères assez contraignants
- quantité d'eau importante ;
- présence à une distance proche d'agglomérations, de 20 à 40 kilomètres (Manosque
et Aix-en-Provence) ;
- proximité d'une faculté (Marseille) pour faciliter le recrutement et la formation du
personnel scientifique que nécessite le développement de la recherche.
Parmi les lieux susceptibles d'être retenus, CADARACHE apparut rapidement comme le plus
favorable. Le décret déclarant le début des travaux d'utilité publique fut signé le 14 octobre
1959 et, en mars 1960, le premier coup de pioche était donné.
Aujourd'hui, le Centre d'Étude de Cadarache reçoit chaque jour 2500 agents du C.E.A., dont
près de 700 Ingénieurs ou diplômés de haut niveau et emploie 1500 Techniciens de tout corps
de métier. Il est le pôle technologique du C.E.A. en région Provence-Alpes-Côte d'Azur et a
pour vocation
- la maîtrise du développement industriel des réacteurs nucléaires,
- l'ouverture aux technologies nouvelles ; instrumentation électronique, énergie
solaire, bioénergie, ionisation des denrées agroalimentaires, dessalement, robotique,
automatisation, contrôles non destructifs, valorisation des rejets thermiques.
1.1.3. DRFC
En France, les recherches en vue de l’utilisation industrielle de l’énergie de fusion
thermonucléaire sont menées depuis 1959, dans le cadre d'un contrat d'association
EURATOM-CEA au sein du Département de Recherches sur la Fusion Contrôlée. Ce
programme s’inscrit dans une stratégie coordonnée au sein de la communauté européenne
dans laquelle la contribution française dépasse 20%.
Les ressources budgétaires du DRFC sont assurées par :
- la subvention attribuée par le CEA/DSM,
- une participation de l'EURATOM aux dépenses à hauteur de 25 % pour l'ensemble
du fonctionnement et de 45 % pour les investissements lourds. Le budget annuel de
fonctionnement est d'environ 30 millions d’euros.
Le D.R.F.C., unité relevant de la Direction des Sciences de la Matière (D.S.M.) du C.E.A., par
ses initiatives et ses résultats, a fortement façonné la stratégie européenne et a beaucoup
contribué à la place prépondérante de l'Europe dans ce domaine.
Depuis son regroupement au centre d’études de Cadarache en 1986, le DRFC exploite après
avoir assuré la construction, l’expérience TORE SUPRA, premier grand tokamak au monde
doté d’un aimant supra conducteur, mis en service en avril 1988. Cette activité majeure est
complétée par une participation au programme du JET, machine européenne ayant atteint les
meilleures performances au monde, et par une contribution croissante à la préparation des
projets pour la prochaine étape ITER.
Alan TENZA GT promo2003_____________________________________Page 9 sur 79
Association
EURATOM -CEA
L'effectif du D.R.F.C. se compose d'environ 310 agents permanents dont 150 chercheurs,
ingénieurs ou physiciens, répartis en trois unités de compétences complémentaires
GSAC
Figure 1.1.3.a. : Organigramme du D.R.F.C.
D.R.F.C. : Département de Recherche sur la Fusion Contrôlée.
S.C.C.P. : Service Chauffage et Confinement du Plasma.
S.T.E.P. : Service Tokamak et Exploitation et Pilotage.
S.I.P.P : Service Intégration et Paroi Plasma.
G.S.A.C. : Groupe Support Au Chauffage.
Mon est effectué stage dans le service SCCP au sein du groupe SAC. Ce groupe a en
charge l’exploitation et le développement des installatio ns de chauffage par ondes haute
fréquence.
Figure 1.1.3.b : Juin 1986 - Vue aérienne du site du DRFC à Cadarache, au centre se trouve le bâtiment
abritant Tore Supra.
Alan TENZA GT promo2003_____________________________________Page 10 sur 79
Association
EURATOM -CEA
1.2. Présentat ion de la f us ion
1.2.1. Principes de la fusion
La fusion thermonucléaire pourrait être la source d’énergie du 21ème siècle. On peut produire
de l’énergie en réalisant la fusion de noyaux légers, la plus facile à obtenir étant celle du
deutérium (D) et du tritium (T). Le processus de fusion nucléaire est à l’origine de l’énergie
des étoiles comme le soleil. Ce processus libère l’énergie qui, sous forme de rayonnement
solaire, entretient la vie sur terre.
v La Théorie
Pour rapprocher deux noyaux atomiques chargés positivement, il faut communiquer une
énergie suffisante pour surmonter la répulsion électrostatique. Cette énergie peut être atteinte
si le milieu en interaction est porté à une température équivalente à celle du soleil. La
répulsion électrostatique la moins forte est celle des isotopes de l’hydrogène Deutérium et
Tritium.
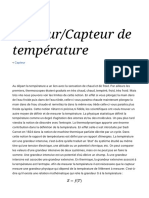
Figure 1.2.1.a. : Réaction de la fusion
Les deux grands atouts de l’énergie de fusion sont :
1. Elle est très abondante: il y a 4.6 10^16 Kg de Deutérium dans la mer, on peut
donc le considérer comme presque illimité. Le tritium élément instable n’existe
pas sur terre. Mais il peut être produit dans le réacteur à fusion tel qu’on
l’imagine par capture de neutrons dans du lithium. Nos ressources minières en
lithium permettent d’assurer 1500 ans d’énergie à l’humanité.
2. Elle est SURE : un réacteur à fusion est un système sûr par conception :
- Pas d’effet de criticité et réaction auto extinguible.
- Quantité de combustible stockée dans la zone chaude (plasma) très faible :
quelques grammes de tritium.
- Pas de cendres radioactives.
Alan TENZA GT promo2003_____________________________________Page 11 sur 79
Association
EURATOM -CEA
La température très élevée nécessaire à la fusion (100 millions de degrés), rend le milieu qui
la supporte complètement ionisé. Ce milieu se présente alors sous la forme d’un mélange
d’ions et d’électrons libres, il est appelé plasma. C’est le quatrième état, après les états solide,
liquide et gazeux.
Le plasma ne peut être obtenu directement dans un récipient matériel. Le réacteur à fusion est
donc une enceinte où règnent des champs magnétiques élevés qui confinent les particules
chargées du plasma. L’enceinte peut être de forme sphérique ou torique (Tokamak,
Stellerator).
Les recherches actuelles orientées sur la fusion Deutérium – Tritium peuvent démontrer à
court terme la faisabilité à l’échelle expérimentale, tandis que la réalisation industrielle
représente un défis technologique.
v Principe du réacteur à fusion
Le réacteur serait constitué d’un « cœur », où se produira la réaction nucléaire, entouré
d’une enveloppe ou « couverture » destinée à la production du tritium et aussi à la
récupération de l’énergie produite, sous forme d’énergie thermique. Cet ensemble doit être
enfermé dans une enceinte de protection pour confiner la radioactivité.
L’énergie produite pourra être transformée ensuite en électricité selon un processus classique.
On peut estimer que quelques kilogrammes de deutérium et de lithium permettraient de
produire autant d’énergie qu’environ 10 000 tonnes de pétrole.
Figure 1.2.1.b. : Schéma du futur réacteur à fusion
Depuis 1968, la configuration tokamak expérimentée initialement en URSS s’avère la
plus efficace et concentre l’essentiel des efforts
Alan TENZA GT promo2003_____________________________________Page 12 sur 79
Association
EURATOM -CEA
Quelques réacteurs, présents et à venir :
- J.E.T. : L’entreprise commune européenne Join European Torus implantée en Grande
Bretagne a été créée en 1978. Elle est aujourd’hui la plus performante des
machines de fusion.
- Tore Supra : C’est un des plus récents grands tokamak. Sa particularité est qu’il possède un
aimant toroïdal supraconducteur pouvant fonctionner en régime permanent et
un système d’évacuation d’énergie permettant d’effectuer des décharges
longues.
- I.T.E.R. : La prochaine étape doit démontrer la faisabilité scientifique et technique de la
fusion sur un appareil atteignant à l’ignition une puissance de 500 Méga watts
avec des durées d’impulsions de 400 secondes. Le projet est en cours d’étude.
- Démo : Projet de réacteur de production d’énergie prototype, après lequel, les réacteurs
industriels pourraient voir le jour.
1.2.2. Tore Supra
Opérationnelle depuis 1988, cette machine est sans équivalent dans le monde. Elle doit
contribuer à la faisabilité de la fusion contrôlée et ouvrir la voie aux réacteurs industriels des
années 2050. Elle se caractérise par une enceinte à vide de 50m3 munie d’une paroi refroidie
par un circuit d’eau pressurisée. Cet aspect est unique chez les tokamak comme l’est l’aimant
toroïdal réalisé en matériaux supraconducteurs, qui développe un champ de 4,5 Tesla et qui a
donné son nom à Tore Supra.
v Structure de Tore Supra
Les caractéristiques essentielles de Tore Supra sont les suivantes :
• Grand rayon du tore plasma : 2,35 mètres.
• Petitrayon du tore de plasma : 0,80 mètre.
• Courant maximum induit dans le plasma : 1,8 millions d'ampères.
• Puissance de chauffage complémentaire disponible : 15 millions de watts.
Alan TENZA GT promo2003_____________________________________Page 13 sur 79
Association
EURATOM -CEA
Figure 1.2.2.a. : Schéma de Tore Supra faisant apparaître ses différents composants
Structure mécanique 4K des Alimentation cryogénique
1 bobines du champ poloïdal 9 1,8K, 4K et 80K
Bobinage supraconducteur 1,8K Vers échangeur cryogénique
2 10
Ecran thermique 80K Vers échangeur eau pressurisée
3 11
Cryostat, enceinte interne Bobines du champ poloïdal
4 220°C 12
Cryostat, enceinte externe 20°C Circuit magnétique
5 13
Pied support du cryostat, des Antenne de chauffage
6 écrans thermiques et des bobines du 14
champ poloïdal
Première paroi 220°C (refroidie Antenne de chauffage
7 activement) 15
Limiteur pompé réglable
8 (refroidi activement)
Les limiteurs installés au bord du plasma jouent le rôle de bouclier thermique pour la première
paroi. Ils assurent également une régulation de densité par un pompage dynamique partiel du
plasma au cours des décharges de plasma.
Alan TENZA GT promo2003_____________________________________Page 14 sur 79
Association
EURATOM -CEA
Figure 1.2.2.b. : Vue extérieure de Tore Supra
La vue extérieure de Tore Supra permet de se rendre compte du grand nombre de
dispositifs qui l’enveloppent.
Figure 1.2.2.c. : L'intérieur de la machine
Alan TENZA GT promo2003_____________________________________Page 15 sur 79
Association
EURATOM -CEA
1.2.3. Le chauffage du plasma
Dans son principe de base, le tokamak utilise le couplage inductif pour créer le courant du
plasma (courant électrique induit par le champ magnétique). Ce courant participe à la
configuration magnétique mais contribue également à chauffer par effet résistif le plasma
dans lequel il circule. C’est le principe du chauffage ohmique qui n’a pour seul défaut que
celui de devenir de moins en moins efficace lorsque la température augmente. Pratiquement
limités dans les conditions expérimentales usuelles à 2 ou 3 kev (environ 34 800 000 K), les
plasmas ohmiques doivent alors être surchauffés par d’autres procédés pour atteindre les
températures de fusion.
Dans TORE SUPRA, 3 techniques différentes sont utilisées.
1. Chauffage par ondes à la fréquence cyclotronique ionique
2. Chauffage par ondes à la fréquence cyclotronique électronique
3. Chauffage par ondes à la fréquence hybride
Elles consistent à envoyer des ondes à des fréquences bien précises qui correspondent à
des fréquences de résonance de phénomènes physique au sein du plasma, notamment la
fréquence de giration des ions et des électrons autour des lignes de champ magnétique. On
peut ainsi transférer de l’énergie au plasma et donc le chauffer.
Alan TENZA GT promo2003_____________________________________Page 16 sur 79
Association
EURATOM -CEA
2. LE CONTEXTE DE MA MISSION
Au sein du groupe GSAC, Groupe Support Au Chauffage ma mission est de :
1. Apprendre la technique de la modélisation aux éléments finis appliquée aux problèmes
de transmission de chaleur. Deux logiciels seront employés : le system CASTEM
développé au CEA et ANSYS, un logiciel commercial fréquemment employé pour les
calculs structurels, thermiques, électrostatiques magnétostatiques et pour les
problèmes de propagation à haute fréquence.
2. Appliquer la technique FEM à l’analyse thermomécanique de composants à haute
fréquence (HF) qui font partie de l’antenne ITER Proto 2005 FCI, un prototype de
l’antenne FCI du réacteur ITER, qui sera installée sur le tokamak Tore Supra de
Cadarache. L’analyse thermomécanique sera couplée à une analyse haute fréquence du
composant, qui décrira la distribution des courants HF dans le composant et tiendra
donc compte d’une façon précise des phénomènes de concentration de puissance
typiques des hautes fréquences.
Deux condensateurs sont modélisés :
Un condensateur « end of coax », de géométrie simple, permettant les calculs
théoriques. Dans cette configuration le condensateur est placé au bout d’un câble coaxial.
Un condensateur commercial COMET Type, qui sera effectivement employé sur
l’antenne ITER Proto 2005 FCI
2.1. Présentat ion des an tennes FCI.
2.1.1. Le système de chauffage IC
Dans le cadre des études qui sont menées depuis maintenant plus de 12 ans sur l’augmentation
et l’amélioration des moyens de chauffage du plasma du Tokamak Tore Supra situé à
Cadarache, la conception d’un nouveau prototype d’antenne de chauffage à la Fréquence
Cyclotronique Ionique (FCI) est actuellement en cours. Ce prototype, permettra de tester le
circuit électrique qui sera employé pour la future antenne FCI de Tore Supra fonctionnant sur
des impulsions de longues durées (1000 s). Ce prototype construit sur la base d’une antenne
existante est prévu d’être construit rapidement et d’être testé sur TS pendant la campagne
2003.
Alan TENZA GT promo2003_____________________________________Page 17 sur 79
Association
EURATOM -CEA
Ce système de chauffage utilise une onde rapide qui se propage via l’antenne à une fréquence
proche de celle de la fréquence de giration d'une des populations ioniques présentes dans le
plasma (de l'ordre de quelques dizaines de MHz , correspondant à des longueurs d'onde
décimétriques). La fréquence de giration dépend :
• de la masse de l'ion en question, ce qui permet d'être sélectif dans la population
ionique qu'on choisit d'exciter,
• du champ magnétique dont l'intensité décroît de l'intérieur vers l'extérieur du tokamak,
ce qui permet de localiser l'endroit où on va déposer de l'énergie dans le plasma en
réglant la fréquence de l'onde.
Les antennes FCI qu’on étudie au CEA abritent un circuit électrique résonant ("Résonant
Double Loop") qui permet d'accorder l'antenne au générateur en fonction des conditions de
couplage de l'onde au plasma, pour minimiser la puissance réfléchie dans la ligne de
transmission. Le circuit résonant est limité à la partie avant de l'antenne : il est formé du
conducteur qui rayonne vers le plasma et de 2 impédances variables, constitues, dans le cas de
Tore Supra, par deux condensateurs coaxiaux travaillant sous vide et de capacité variable. Des
densités de puissances très hautes ont ainsi été obtenues (>16 MW/m2).
La face avant des antennes (écran de Faraday) est recouverte de carbure de bore (B4 C,
matériau bas Z) pour la protéger du bombardement des particules issues du plasma et pour
éviter de contaminer le plasma avec des impuretés métalliques.
L'antenne est protégée à droite et à gauche par des éléments activement refroidis qui
permettent d'intercepter le flux thermique convecté le long des lignes de champ magnétique
qui s'appuient sur ces protections.
Figure 2.1.1.a : vue d’ensemble de l’antenne FCI (Prototype FCI 2003)
Tous les éléments de la face de l'antenne sont refroidis par le circuit d'eau sous pression (35
bars) à 220°C (max).
3 antennes de ce type sont installées dans Tore Supra. Chacune d'elles permet d'injecter
jusqu'à 4 MW de puissance (par antenne) entre 40 et 80 MHz.
Alan TENZA GT promo2003_____________________________________Page 18 sur 79
Association
EURATOM -CEA
Schématiquement, cette antenne se décompose en trois sous-ensembles ayant chacun une
fonction définie :
• une ligne d’alimentation composée de conducteurs coaxiaux de différentes sections
montés en série (transformateur d’impédance et bridge), qui se connecte via la boite d’antenne
au système d’adaptation;
• le système d’adaptation d’impédance du circuit, composé de capacités électriques
connectées aux straps;
• la partie exposée au plasma qui comprend un écran de Faraday et des pièces
mécaniques appelées straps (les parties rayonnantes de l’antenne) ;
2.1.2. Fonctionnement
La puissance RF (radio fréquence) est couplée au plasma par les antennes placées dans la
chambre à vide du tokamak (figure 2.1.2.a). Les antennes sont connectées à des générateurs
de puissance par des lignes coaxiales (figure 2.1.1.a).
L’installation présente sur Tore Supra comporte 6 générateurs à tétrodes, pouvant fournir
chacun 2MW pendant 30s toutes les 4 minutes. La première injection dans le plasma de 4
MW pendant 1s a eu lieu en mars 1991.
Figure 2.1.2.a : Extrémité de l’antenne côté plasma
Avec de telle puissance, il est nécessaire d’adapter l’impédance de l’antenne à celle du
plasma.
C’est le rôle des impédances d’accord. Elles transforment l’impédance d’entrée de l’antenne
qui dépend des conditions d’émission (densité du plasma, distance au plasma…). et de la
fréquence du travail, à celle de sortie du générateur qui est constante (30 Ω )
Les conditions d’émission varient en fonction du temps et cela se traduit par une réflexion de
l’onde vers le générateur. L’impédance doit donc être modifie en temps réel, ce qu’on obtient
par la variation des réactances (condensateurs) d’accord, pilotes par boucles d’asservissement
(automatic matching).
Alan TENZA GT promo2003_____________________________________Page 19 sur 79
Association
EURATOM -CEA
Current
Voltage
Figure 2.1.2.c : Schéma du système d’adaptation d’impédance ITER-like
Certaines variations de charge sont pourtant trop rapides pour être compensées par la boucle
d’adaptation automatique.
Une antenne capable d’accepter des variations de charge en transférant un minimum de
puissance au générateur est donc nécessaire pour accepter ces conditions transitoires.
Une antenne « tolérante » vis à vis des variations de charge a été proposé pour ITER et son
schéma est montre en Fig. 2.1.3.a. Son fonctionnement est décrit en Annexe 2 [1].
Au CEA deux prototypes de l’antenne ITER sont en préparation,
-un premier prototype (ITER proto 2003) pour étudier les caractéristiques électriques
sur impulsions de puissance relativement courtes 2 MW, 30s,
-un second (ITER proto 2005), pour fonctionnement continu.
2.1.3. Le système étudié pendant le stage : les condensateurs à capacité variable
Les deux impédances variables sont constituées de deux blocs de condensateurs à électrodes
cylindriques. Chaque bloc est formé de deux parties : un groupe d’électrodes cylindriques au
potentiel V1 et un autre groupe au potentiel V2 (voir figure ci-dessous). Ces deux groupes
d’électrodes s’emboîtent l’un dans l’autre, ce sont les électrodes fixes et mobiles. La variation
de la profondeur de chevauchement des cylindres (électrodes) détermine la valeur de la
capacité.
Alan TENZA GT promo2003_____________________________________Page 20 sur 79
Association
EURATOM -CEA
Ligne
coaxiale
Figure 2.1.3.a : boite d’antenne et partie rayonnante de l’antenne Proto 2003.
En faisant ainsi varier la valeur de la capacité, on fait varier l’impédance du bout de l’antenne
pour l’adapter à celle du plasma face à l’antenne. On évite alors la propagation d’une onde
réfléchie vers le générateur.
Electrodes Electrodes
fixes mobiles
condensateur
1
diélectriques
condensateur
2
Figure 2.1.3.b : Coupe transverse de deux condensateurs d’une antenne FCI
Alan TENZA GT promo2003_____________________________________Page 21 sur 79
Association
EURATOM -CEA
L’électrode mobile est connectée à un soufflet en inox recouvert d’une fine couche de cuivre,
qui permet le mouvement axial, et qui est à son tour soudée à une bride positionnée dans le
même plan que l’électrode fixe.
Un anneau diélectrique (Al2 O3 ), brasé entre l’électrode fixe et la bride ferme la Cavité autour
des électrodes et permet de maintenir un vide poussé entre les électrodes. En hautes
fréquences, le courant circule à la surface des conducteurs dans une couche très mince de la
matière appelée épaisseur de peau et notée δ et s’exprime comme suit
2r 1 r
d = =
wm 2p 10 −− 7 f
Pour les fréquences en question (55 MHz) l’épaisseur de la couche est de 10 µ m.
Ce condensateur coaxial de puissance est construit pour être monté au bout d’une ligne
coaxiale rigide, de diamètre 9/13 pouces (230 mm).
Avec ces dimensions, 230 mm, le condensateur a les caractéristiques électriques suivantes en
fonctionnement continu :
Valeurs de capacité 30 –300 pF
Tension de travail 50 kV peak
Courant de travail 1 kA r.m.s
Alan TENZA GT promo2003_____________________________________Page 22 sur 79
Association
EURATOM -CEA
2.2. Ordres de grandeur des para mè tres et incon nues du mod è le
2.2.1. Aspect électromagnétique du modèle
Une analyse numérique FEM doit entre précède par une évaluation théorique des
caractéristiques du composant en question, qui doit donner un aperçu des valeurs plus exactes
de l’analyse numérique et guider l’analyse des résultats.
Pour calculer les paramètres R, L, C du condensateur on assimile celui-ci à un système de
lignes coaxiales avec le conducteur extérieur représenté par le soufflet, et le conducteur
intérieur par l’ensemble des électrodes du condensateur.
Cette assimilation est justifiée car un courant (de déplacement) passe en effet dans ces
éléments, sur leur surface (« effet de peau »), comme il le ferait dans une ligne. C’est ce
qu’indiquent grossièrement les flèches noires.
b
Electrode
ajustable Flange
l pour
Soufflet connexion
au câble
Guide du coax
soufflet a
Electrode
fixe
Courant I
Figure 2.2.1.a : section du condensateur « end of coax »
Alan TENZA GT promo2003_____________________________________Page 23 sur 79
Association
EURATOM -CEA
Paramètres du système :
-1
ε 0 = perméabilité du vide = 1,256 µ H.m
-7 -1
m0 = permittivité du vide = 4 π.10 H.m
7 -1
l = conductivité électrique = 4.10 ς .m-1 (cuivre à 150°C).
-5
δ = 1,07 10 m épaisseur de peau
a = diamètre du conducteur intérieur = 156,5 mm
b = diamètre du conducteur extérieur = 265 mm
l = longueur de la ligne
Inductance
Dans une ligne coaxiale, l’impédance par unité de longueur se calcul avec la formule[2] :
m b
L ' = 0 ln et l’impédance totale L est L = L’.l .
2p a
Soit L/l = 1,06 10-8 H.m-1
Ainsi L = 9,50.10-9 H lorsque les électrodes sont emboîtées à fond (l = 90 mm).
Et L = 1,80.10-8 H lorsque les électrodes sont éloignées au maximum (l = 170 mm).
Capacité
La capacité C a été calculée dès la conception du condensateur est vaut C = 4,144 nF.m-1 .
Pour une longueur face- à- face des électrodes de 0,04 m (l = 130 mm) C = 165.8 pF
Résistance
Pour calculer la résistance de ce système, on utilise l’expression Z = e
lSd
Sδδ section de passage du courant, Sd = pd .Diamétreconducteur
e longueur parcourue dans le conducteur.
7 -1 -1
l conductivité électrique = 4.10 ς .m .
v Dans les électrodes :
e = 80 mm
Soit pour chaque électrode n Zn = 0.01
107.p.R n
1
Dans notre système les résistances sont en parallèle et la résistance totale est Z elec =
1
∑
n Zn
Soit Zelec = 5.64 10-5 ς
v Dans le soufflet :
e = 862,14.10-3 m.
Sdd = pd .D cond = 8,89.10-6 m².
Soit Zsouf = 2,42.10-3 ς
Ztotal = Zelec + Zsouf = 2,48 mς
Alan TENZA GT promo2003_____________________________________Page 24 sur 79
Association
EURATOM -CEA
Impédance caractéristique
1 m0 b
L’impédance caractéristique d’une ligne coaxiale s’exprime par[2] : Z c = ln
2p e0 a
Soit ici Z c = 31,7 ς
2.2.2. Aspect thermique
L’échauffement du condensateur est du au passage du courant HF sur les surfaces des
électrodes cylindriques, du soufflet et des deux électrodes plates. Les électrodes plates sont
refroidies par convection avec de l’eau. Les électrodes cylindriques sont refroidies par
conduction vers l’électrode plate. Le soufflet est aussi refroidit activement par circulation
d’eau sur la paroi extérieure.
Pour certaines applications il est préférable d’éviter le refroidissement à eau de ce composant
mécaniquement faib le, parce que dans le cas d’une rupture du soufflet, la conséquence d’une
fuite d’eau pourrait causer dommages permanentes à l’antenne ou au tokamak lui- même.
Ainsi, on envisage aussi un refroidissement du soufflet a circulation d’Hélium pressurisé,
avec un échange thermique He-eau.
On considéra pourtant pour les mêmes géométries les deux cas de refroidissement, à eau et
mixte eau/He.
Une coupe longitudinale des électrodes cylindriques formants les capacités est représentée ci
dessous. Pour simplifier le schéma, trois cylindres sont dessinés.
Figure 2.2.2.a : schéma simplifié de trois électrodes.
Alan TENZA GT promo2003_____________________________________Page 25 sur 79
Association
EURATOM -CEA
Notations :
en = épaisseur de l’électrode n
Rn = rayon, ou distance à l’axe du condensateur, de l’électrode n
∂T
Φ x = lS ( x)
∂x
∂T
Φ x + dx = lS ( x + dx)
∂x
j pvn = dx.Sp vn
l = conductivité thermique = 385 W.m-2 .K-1 .
2 2
e e
S = p R + − p R − = 2pRe
2 2
-8 -1
r = résistivité électrique= 2.10 Ω .m
f = 2 πω = fréquence de travail = 55 Mhz
Sdd = pd .D cond
Les géométries du système permettent de faire le calcul dans le cas monodimensionnel
En effet, les électrodes étant assez minces devant leur longueur et le système étant
axisymétrique on ne considèrera une évolution de la température que dans la direction axiale.
Bilan :
Les échanges thermiques dus au rayonnement sont considérés négligeables (ensemble des
matériaux supposés à des températures assez proches) par rapport aux autres échanges.
Φ x = Φ x ++dx + (j RF + S.p vn )dx
d 2T
Φ x = Φ x ++dx − dx lS
dx 2
x ++dx
dΦ
Φ x = Φ x ++dx − dx
dx x ++dx
D’où
d 2T
lS = − (j RF + Spvn )
2
dx x
Expression des flux.
Ø Charge due aux flux de neutrons.
pvn qui dans notre cas vaut 0.8W/m3 .
Ø Echauffement dû aux courants.
I2
Puissance par unité de longueur, dissipée par le courant I Plin = r
4Sdd
Alan TENZA GT promo2003_____________________________________Page 26 sur 79
Association
EURATOM -CEA
Flux dissipé dans notre cas :
1 Iˆint
2
r Iˆext
2
r = r Iˆint
2
Iˆext
2
j RF = j RF int + j RF ext = + +
2 e e 4pd e e
2p R − d 2p R + d R− R+
2 2 2 2
Equation de la température en régime stationnaire.
d 2T
lS = − (j RF + Spvn ) => T de la forme T ( x)=a.x 2 + b.x + g
2
dx x
Ø Conditions aux limites
T(x=0)=T0 = 150°C
dT
= 0
dx x ==L
D’où
kx 2
T (x) = − + kLx + T0
2
Avec
Iˆint Iˆext
−− 7 2 2
1 rf 10
k = + + pvn
l 4pRe e e
R − R+
2 2
Calculs des courants Iext et Iint ( en utilisant les formules tirées de [3])
n −−1
I1,int = 0 et pour n >1 In ,int = ∑ ak , k ++1 Ic
k ==1
Cn , n ++ 1
Avec an , n ++1 =
Ctotale
n
IN , ext = Ic et pour n<N In , ext = ∑ ak , k ++ 1 Ic
k ==1
Alan TENZA GT promo2003_____________________________________Page 27 sur 79
Association
EURATOM -CEA
On calcul ainsi :
Rayon (m) Iext (A) Iint (A) K
0.0225 94,70 0 433,7956
0.0295 220,36 94,70 1400,492
0.03625 365,47 220,36 2670,809
0.04325 543,87 365,47 4138,44
0.05 739,31 543,87 5766,136
0.057 970,43 739,31 7518,808
0.06375 1216,18 970,43 9437,779
0.07075 1500 1216,18 11456,33
0.0775 1500 1500 11191,32
Champs de température le long des électrodes cylindriques
Premiers résultats (I constants sur chaque électrode, épaisseur des électrodes = 1.5 mm).
280
260
240
R1
220 R2
R3
200 R4
(1)
T°C
R5
180
160
140
120
100
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09
X (m)
280
260
240
220 R1
R2
R3
200
(2) R4
T°C
180
160
140
120
100
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 X (m)
Figure 2.2.2.b : températures le long des électrodes fixes (1) et mobiles (2).
Conclusion
Même si les températures restent admissibles, on obtient un écart maximum de 110°C entre la
paroi froide et l’externe non refroidie. Pourtant, on peut de manière simple diminuer cette
augmentation de température le long les électrodes en augmentant l’épaisseur de celles-ci. On
double l’épaisseur passant de 1,5 mm à 3 mm.
Alan TENZA GT promo2003_____________________________________Page 28 sur 79
Association
EURATOM -CEA
Résultats avec changement d’épaisseur des électrodes (I constants, épaisseur = 3 mm).
Ø Contraintes :
Conserver la valeur de la capacité totale (nouveau rayons).
Expression de la capacité entre deux électrodes :
2pe 0
Cn , n ++1 =
en ++ 1
Rn ++1 −
ln 2
en
Rn +
2
On veut que Cn , n ++1 = C ' n ,n ++1
e n ++1 ' e 'n ++ 1
R n ++ 1 − R n ++ 1 −
Ce qui implique que 2 = 2 avec e’= 3mm
en e 'n
Rn +
'
Rn+
2 2
en ++1
R n ++1 −
2 e 'n e 'n ++ 1
D’où R 'n ++1 = R' n + +
e n 2 2
Rn +
2
En partant de R’(1)=R(1)=22.5 mm, de proche en proche on obtient la valeur de tous les
nouveaux rayons. En bleu les rayons des électrodes fixes (en m), en noir les rayons des
électrodes mobiles (en m)
Rayon (m)
0,0225
0,031177
0,039848
0,048995
0,058020
0,067470
0,076740
0,086412
0,095867
Alan TENZA GT promo2003_____________________________________Page 29 sur 79
Association
EURATOM -CEA
Les courbes de températures obtenues sont :
200
190
180
R1
170
R2
R3
160 R4
(1) R5
T°C
150
140
130
120
110
100
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 X (m)
200
190
180
170 R1
R2
160 R3
R4
(2)
T°C
150
140
130
120
110
100
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 X (m)
Figure 2.2.2.c : Température le long des électrodes fixes (1) et mobiles (2)
Conclusion
L’écart de température d’un bout à l’autre des électrodes diminue, l’écart est passé à 35°C.
Une autre amélioratio n est possible, elle consisterait à augmenter l’épaisseur des électrodes
des rayons supérieurs, là où les courants sont les plus forts et où l’élévation de température est
ainsi plus grande.
Alan TENZA GT promo2003_____________________________________Page 30 sur 79
Association
EURATOM -CEA
2.2.3. Ordre de grandeur des déformations au niveau des électrodes.
v Dilatation thermique linéaire (dans le sens de l’axe des électrodes).
La variation de longueur du cuivre s’exprime par :
∆ L = a.L.∆ T
α = coefficient de dilatation linéaire du cuivre = 17.10− 6 / K (valeur moyenne à 200°C)
D’où :
Rayons en cm DT (max) DL (mm) dilatation linéaire
2,25 151,3 0,205887
élongation en mm
3,117 154,4 0,210094 0,3
3,984 158,5 0,215623
4,899 0,2
163,2 0,222010
5,802 168,4 0,229094 0,1
6,747 174,0 0,236721
0
7,674 180,2 0,245073
0 2 4 6 8 10 12
8,641 186,6 0,253857
9,586 185,8 0,252704 rayons en cm
Figure 2.2.3.a : élongation des électrodes dans la direction de l’axe du condensateur.
Conclusion
La variation de longueur des électrodes reste assez faible, d’autant que dans le sens de l’axe
des électrodes il n’y a pas de contraintes de longueur. Il n’ y a pas de problème à ce niveau.
v Dilatation thermique du rayon des électrodes.
On applique ici la même formule ∆ L = a.L.∆ T .
Cette relation donne une approximation très grossière car elle ne tient pas compte des
contraintes d’encastrement.
Chaque électrode est découpée en morceaux de longueur 10 mm et de température constante.
On obtient alors :
dilatation rayons
120
R1
100
rayons (mm)
R2
80
R3
60 R4
40 R5
20 R6
0 R7
R8
0 0,02 0,04 0,06 0,08 0,1
R9
abscisse (m)
Figure 2.2.3.1.g : dilatation des électrodes dans la direction radiale.
Alan TENZA GT promo2003_____________________________________Page 31 sur 79
Association
EURATOM -CEA
Conclusion
La variation de rayon est de l’ordre de 3.10-2 mm au maximum.
Il n’y a donc pas de risque de contact entre électrodes, celles-ci étant espacées de 10 mm.
Ainsi, on valide le modèle, c'est- à-dire qu’il semble capable de fonctionner correctement, sans
trop s’échauffer. Notons cependant qu’il faut pour cela atteindre les conditions que nous nous
sommes imposées, une température constante de 150°C sur les extrémités des électrodes.
Pour cela l’échange thermique avec le fluide de refroidissement doit être très efficace. Nous
estimerons donc par la suite les coefficients d’échange thermique par convection adéquats.
Alan TENZA GT promo2003_____________________________________Page 32 sur 79
Association
EURATOM -CEA
3. ANALYSE THERMIQUE AVEC LA METHODE DES ELEMENTS
FINIS (FEM).
3.1. Les out ils
Les logiciels utilisés pendant mon stage sont :
- AUTOCAD, un logiciel de Computer Aided Design (CAD) qui permet de tracer des
dessins techniques, de les modifier facilement, de réaliser des formes complexes en deux
et trois dimensions à l’échelle arbitraire. Les fichiers de sortie de AUTOCAD peuvent être
importes dans les logiciels FEM et employés directement pour définir la géométrie du
modèle à analyser.
Deux logiciels de simulations aux éléments finis (FEM) qui permettent de modéliser et tester
les prototypes :
CASTEM2000 est un logiciel propre au CEA, orienté principalement vers la
thermodynamique et la mécanique.
ANSYS qui présente l’avantage de recouvrir plus de domaines d’analyse que
CASTEM 2000, comme notamment l’électromagnétisme et autres analyses diverses, comme
dans notre cas, électromagnétique-thermique, qui peuvent être associés sur le même modèle
géométrique. Ce logicie l sera présenté en partie 4.
3.1.1. AUTOCAD
Le logiciel AUTOCAD permet de réaliser simplement des dessins techniques, plans ou coupe
en deux dimensions.
Les outils à dispositions donnent à l’utilisateur les moyens de tracer avec précision en
respectant les normes communes aux dessins industriels.
Ce qui donne tout son intérêt au logiciel dans le milieu industriel c’est que l’on peut
enregistrer le travail sous différents formats compatibles avec d’autres logiciels. Les données
peuvent servirent d’entrée à certains logiciels de calculs et donc éviter une double
construction géométrique, qui coûte de l’argent et est une source d’erreur.
Alan TENZA GT promo2003_____________________________________Page 33 sur 79
Association
EURATOM -CEA
3.1.2. CASTEM2000
CASTEM2000 est un logiciel de calcul de structures par la méthode des éléments finis et plus
généralement de résolution d’équations aux dérivées partielles par la méthode des éléments
finis. Il a été développé au Département de Mécanique et Technologie (DMT) du
Commissariat à l’Energie Atomique (CEA).
Les analyses par éléments finis se construisent de la manière suivante :
Description de la géométrie, maillage. Choix du support géométrique.
Choix du type d’éléments finis et du modèle de comportement.
Données des caractéristiques du matériau et des caractéristiques géométriques
supplémentaires.
Donnée des conditions aux limites.
Donnée du chargement.
Résolution du système.
Le langage de CASTEM2000 est le Gibiane, il permet de communiquer avec le programme.
La syntaxe est basée sur l’utilisation de directives, d’opérateurs et de procédures qui
s’applique à des opérandes.
Des couplages de différents domaines physiques sont possibles mais pas avec
l’électromagnétisme.
Pour le post-traitement, on ne peut malheureusement pas intervenir sur la fenêtre graphique
qui affiche le système géométrique. On peut faire des zooms, obtenir la valeur en un point,
mais on ne peut pas utiliser cette fenêtre graphique pour modifier le système ou les
chargements.
Le listing du programme que j’ai fait se trouve en annexe 4. J’ai enlevé la partie
correspondant à la construction du modèle car cela rajoutait une dizaine de pages.
Alan TENZA GT promo2003_____________________________________Page 34 sur 79
Association
EURATOM -CEA
3.2. Ana ly se du co nden sateur « end of coax » (Log ic ie l CAST EM
200 0)
On analyse pour commencer le condensateur « end of coax », montré en Figure 2.2.1.a et
analysé théoriquement dans la partie 2.
Les dimensions sont :
Figure 3.2.a : dimensions du système en mm
Les valeurs des rayons sont celles calculées dans la partie 2 :
Pour les électrodes fixes (en partant de l’extérieur) :
R1 = 22,5 mm
R2 = 39,8 mm
R3 = 58 mm
R4 = 76,7 mm
R5 = 95,9 mm
Pour les électrodes mobiles :
R1 = 31,2 mm
R2 = 49 mm
R3 = 67,5 mm
R4 = 86,4 mm
Alan TENZA GT promo2003_____________________________________Page 35 sur 79
Association
EURATOM -CEA
3.2.1. Refroidissement par eau
3.2.1.1. Présentation du système : le condensateur à capacité variable
Dans cette partie je vais dimensionner le système de refroidissement en utilisant l’eau comme
fluide de refroidissement.
eau
soufflet
Electrodes
mobiles
Electrodes
fixes
Céramique
Axe de symétrie
eau
Figure 3.2.1.1.a : u passage de l’eau au niveau du condensateur
On localise tout d’abord les zones à refroid ir.
L’ensemble formé des électrodes fixes et des électrodes mobiles est parcouru par la totalité du
courant. C’est donc cet ensemble qui, à cause de l’effet Joule, sera la principale source de
chaleur. Le système de refroidissement devra ainsi atteindre ces deux groupes d’électrodes.
Alan TENZA GT promo2003_____________________________________Page 36 sur 79
Association
EURATOM -CEA
3.2.1.2. Le refroidissement
Les électrodes fixes et mobiles sont refroidies par eau à une température de 25°C, le système
de refroidissement utilisé sera celui qui existe déjà sur le Tokamak Tore Supra et qui est
adaptable à notre cas. Il ne sera donc pas étudié et une condition aux limites sera imposée à ce
niveau.
On va étudier deux cas de pression du circuit d’eau :
Une pression à 30 bars, qui utilise un circuit d’eau prévu sur l’installation d’ITER ( et
présent sur le tokamak Tore Supra, 30 bars et 150°C)
Une pression de 1 bar et 25°C, qui présente l’avantage de soumettre le système à des
efforts mécaniques moins intenses.
Cependant, si la température maximale atteinte de l’eau au niveau de condensateur est
supérieure à la température d’ébullition, on choisira d’augmenter la pression de l’eau.
L’estimation de la valeur du coefficient d’échange par convection heau,, se fait en calculant le
débit d’eau nécessaire pour évacuer le flux de chaleur créé par le courant, puis en déduisant la
vitesse que va atteindre le fluide et le régime de l’écoulement qui imposera la corrélation à
utiliser.
La page suivante montre les régions dans lesquels l’eau circulera (Figure 3.2.1.2.a).
Alan TENZA GT promo2003_____________________________________Page 37 sur 79
Association
EURATOM -CEA
∆z
Figure 3.2.1.2.a:schéma de principe du système de refroidissement
Alan TENZA GT promo2003_____________________________________Page 38 sur 79
Association
EURATOM -CEA
3.2.1.3. Formules utilisées et grandeurs caractéristiques.
Une des étapes les plus importantes est l’estimation des coefficients de transfert thermique par
convection heau.
Le logiciel CASTEM2000 contient quelques corrélation mais n’en utilisera qu’une pour tout
le calcul.
Le calcul théorique du permettra de tenir compte de la géométrie du système. Ces estimations
donneront différentes valeurs de heau pour différentes géométries.
• Estimation du coefficient h
Comme souvent dans un problème de convection avec une géométrie complexe la corrélation
qui correspond au système n’est pas disponible.
L’écoulement d’eau arrive sur la partie supérieure du condensateur, voyant ainsi un obstacle
de forme cylindrique et dont l’axe est parallèle au sens de l’écoulement. Mais le cas reste
particulier car :
- la partie latérale de ce « cylindre » est ondulée
- l’écoulement est comprimé à cause des parois latérales et supérieures, qui entourent ce
« cylindre ».
La comparaison des corrélations qui semble se rapprocher le plus du cas présent permettra
d’estimer la ou les corrélations les plus appropriées pour l’évaluation du coefficient h.
En première approximation, l’écoulement sur la partie supérieure est comparable à
l’écoulement entre deux plaques planes, comme l’illustre la figure 3.2.1.3.a ci-dessous.
R R
2 πRmoy
2 πRmoy
Vue de dessus
Figure 3.2.1.3.a : écoulement de l’eau sur la partie supérieure du condensateur
Alan TENZA GT promo2003_____________________________________Page 39 sur 79
Association
EURATOM -CEA
Les corrélations utilisées sont :
Si Re < 400 000 Nu = 0,664. Re1 / 2 Pr 1 / 3 (a)
Si Re > 400 000 Nu = 0,035. Re 4 / 5 Pr 1 / 3 (a’) [4]
En ce qui concerne la partie latérale du condensateur, le cas est proche d’un écoulement dans
un espace annulaire concentrique, mis à part le fait qu’une des deux surfaces soit ondulée.
La figure 3.2.1.2.b illustre ce cas :
Figure 3.2.1.3.b : écoulement de l’eau sur la latérale supérieure du condensateur
Il existe une corrélation, celle de Lunberg and al [5] :
0 ,14
de
Nu = 0,023.Re 0 ,8
Dh
1/ 3
. Pr .
(b), valable lorsque l’écoulement est turbulent, dans une
di
conduite annulaire concentrique.
Même pour de faibles nombres de Reynolds, on utilisera cette corrélation pour rendre compte
de l’effet de la turbulence créée par la géométrie du système. En effet les ondulations du
soufflet favorisent un écoulement turbulent.
Pour comparer les valeurs de h que nous allons trouver à d’autres, je m’intéresse aux résultats
donnés par les corrélations de Reiher [6] suivantes :
h.Dh m 0 , 35
Nu = = C. Re Dh . Pr
l
pour 2 500 < Re < 8 000 C = 0,180 m = 0,699 (1)
pour 5 000 < Re < 100 000 C = 0,104 m = 0,675 (2)
Valable pour un écoulement arrivant sur un obstacle de section rectangulaire
Alan TENZA GT promo2003_____________________________________Page 40 sur 79
Association
EURATOM -CEA
Ce cas est proche de l’écoulement qui arrive sur la partie supérieure du condensateur qui est
plane, la déviation de l’eau sera du même type
L’utilisation de ces corrélations pour une plage de vitesse de 0,001 m.s-1 à 0,14 m.s-1 , donne le
graphe suivant :
plaque plane
espace annulaire
Reither1
900 Reither2
800
H (W/m²K)
700
600
500
400
300
200
100
0
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14
V (m/s)
Figure 3.2.1.3.c : valeur de h pour 4 corrélations en fonction de la vitesse de l’eau
La corrélation valable en régime turbulent et dans une conduite annulaire est proche de celle
donnant la valeur de h pour un écoulement arrivant face à un obstacle de section rectangulaire
(Reither2). Ceci pour des vitesses de 0,02 à 0,04 m.s-1 .
C’est la même chose pour la corrélation sur la plaque plane et celle du fluide arrivant face à
un obstacle de section rectangulaire (Reither1), pour des vitesses de 0,01 à 0,03 m.s-1 .
Les corrélations choisies semblent donc se recouper avec d’un écoulement arrivant sur un
obstacle de section rectangulaire. Les deux corrélations notées (1) et (2) n’étant valables que
dans un domaine restreint de vitesse, on utilisera, pour chaque cas (partie supérieure du
condensateur et partie latérale) les corrélations notées (a), (a’) et (b).
Alan TENZA GT promo2003_____________________________________Page 41 sur 79
Association
EURATOM -CEA
• On utilise d’autre part les relations :
N .l
Coefficient d’échange par convection h = u
Dh
Et les expressions :
sec tion.de .passage
Diamètre hydraulique D h = 4.
périmètre .mouillé
r .v.D h
Nombre de Reynolds R e =
m
m.C p
Nombre de Prandlt Pr =
l
• Valeurs moyenne d’après les tables des caractéristiques du fluide
ü Eau à 1 bar, 25°C :
Chaleur massique Cp = 4,180 kJ.kg-1 .K-1
-3
Masse volumique ρ = 996,9 kg.m
-6
Viscosité dynamique µ = 900,15.10 kg.m-1 .s-1
-3 -1
Conductivité thermique λ = 0,6105 kg.m.s .K
Pr = 6,16
ü Eau à 30 bars, 150°C :
Cp = 4,310 kJ.kg-1 .K-1
-3
ρ = 918,28 kg.m
-6
µ = 182,60.10 kg.m-1 .s-1
-3 -1
λ = 0,680 kg.m.s .K
Pr = 1,1574
3.2.1.4. Applications numériques
Il passe 1500 ampères dans le soufflet et l’ensemble des électrodes qui sont en cuivre.
L’expression du flux de chaleur ωRF à évacuer est la somme de trois termes :
Le flux créé par le passage du courant dans les électrodes j elec
Le flux créé par le passage du courant sur le disque reliant les électrodes jdisq
Puis le flux créé par le passage du courant dans le soufflet j souf
Le débit massique d’eau est Qm
La chaleur spécifique de l’eau est Cp
Alors j RF = jelec + j disq + j souf
Il faut j RF = Qm .Cp.∆ T( fluide)
Alan TENZA GT promo2003_____________________________________Page 42 sur 79
Association
EURATOM -CEA
Les valeurs des paramètres caractéristiques des matériaux sont les suivantes :
Résistivité électrique du cuivre ρ elec= 0,025 µς.m
-5
Epaisseur de peau δ = 1,07.10 m
Distance au centre (axe de symétrie) Rs_ext = 119,5 mm
Distance au centre (axe de symétrie) Rs_int = 119 mm
Masse volumique de l’eau 1/ ψ = 996,9 kg.m-3
Longueur du soufflet Lsoufflet = 93,7 mm
L’expression du flux de chaleur par unité de longueur ω dû au passage du courant dans un
conducteur est la suivante :
I2
j = r elec (2)
4 Sdd
Il vient :
2 2 2 2
elec . I ext r elec .I int r elec .I ext 1 r elec .I int
1 r
j RF = ∑ + L + R .L
elec _ i disq + soufflet
i 2 2p . R ext d 2p .R intd
4( 2p .R moy )d 2 2p .R s _ intd
ωRF = 328,7 + 897,4 + 388,0
ω RF =1614,1 W
Avec par exemple ∆ T = 10 °C
Cp = 4180 J.kg-1 .K-1 (eau à 25°C).
Le débit massique est Qm = 0,0386 kg.s-1
Donc le débit volumique Q = Qm.ψ
Q = Qm / 996,9 = 3,87.10-5 l.s-1
Q = 2,32 l.min-1
Pour d’autres valeurs de ∆ T :
DT (°C) D (l.min-1 )
30 0,77
20 1,16
10 2,32
Pour le cas présent, avec les dimensions de départ, les vitesses sont calculées
en prenant un débit de 2,32 litres.min-1 :
Si la section S = π.(0,131²-0,1195²)
= 0,00905 m² alors v = 0,00428 m.s-1
(partie latérale du condensateur)
Si la section S = 0,015.2. π.(0,133/2)
= 0,0063 m² alors v = 0,00618 m.s-1
(partie supérieure du condensateur)
Alan TENZA GT promo2003_____________________________________Page 43 sur 79
Association
EURATOM -CEA
A Pour la partie latérale
La section de passage varie dans le sens de l’écoulement entre Smin et Smax (voir « Schéma de
principe du système de refroidissement » chapitre 3.2.1.2.).
v On calcul Smoy :
Smoy = π.(Rext ²-Rmoy²)
Smoy = π.(0,131²-0,1195²)
Smoy = 0,00905 m²
v Le périmètre mouillé est
P = 2. π.Rext + 2. π.Rmoy
P = 2. π.(0,131+0,1195)
P = 1,574 m
Soit Dh = 0,023 m
v Le nombre de Reynolds vaut
Re(1bar) = 996,9*0,00428*(0,023) / 900,15.10-6 Re(1bar) = 109
Re(30bars) = 918,28*0,00428*(0,023) / 182,6.10-6 Re(30bars) = 495.
Le régime est laminaire (Re<104 ).
Nu(1bar)=1,8 h(1bar)=48,3 W.m-2 .K-1
Nu(30bars)= 3,5 h(30bars)=103,5 W m-2 .K-1
L’échange n’est pas efficace avec de tels coefficients.
Les simulations sur CASTEM2000 donnent des températures maximales de l’ordre de 500°C
et le soufflet est soumis à un fort gradient de températures, supérieur à 100°C, entre sa partie
supérieure et sa partie inférieure. Les contraintes seront trop fortes.
Alors les simulations montrent qu’il est nécessaire d’avoir un coefficient h de l’ordre de 200
W m-2 .K-1
En choisissant P = 1 bar
En conservant la géométrie actuelle, le graphe de la figure 3.2.1.2.c montre que cela implique
que la vitesse de l’eau sera de 0,026 m.s-1 , soit un débit de 14,12 l.min-1 .
Le choix est donc le suivant:
- Géométrie conservée
- Vitesse de l’eau 0,026 m.s -1
- Débit de 14,12 l.min-1
- Valeur de h 205 W m-2 .K-1
Alan TENZA GT promo2003_____________________________________Page 44 sur 79
Association
EURATOM -CEA
- Pression de l’eau, 1 bar.
B Pour la partie supérieure du condensateur
La section de passage varie dans le sens de l’écoulement de Smin à Smax.
v Calcul de Dh :
Dh = longueur de la plaque soit R comme noté précédemment, qui est le rayon du plateau
supérieur.
Alors Dh = 0,116 m
v Le nombre de Reynolds vaut
Re(1bar) = 996,9*0,00618*(0,03) / 900,15.10-6 Re(1bar) = 794
Re(30bar) = 918,28*0,00618*(0,03) / 182,60.10-6 Re(30bar) = 3605
Le régime est laminaire (Re<104 ).
Nu(1bar)=34,1 h(1bar)=179,4 W.m-2 .K-1
Nu(30bars)=41,8 h(30bars)=245,3 W m-2 .K-1
Ici les échanges sont plus efficaces (pour un même débit) que pour la partie latérale du
condensateur.
Pour obtenir une valeur de h semblable à celle du cas de la partie latérale telle que choisit
précédemment, la vitesse de l’eau doit être légèrement supérieure 0,00618.
En effet, le graphe 3.2.1.2.c montre que la vitesse de l’eau doit être de 0,008 m.s-1 .
Ainsi avec un débit de 14,12 l.min-1 , la surface de cette partie doit être:
S = ∆ z.2. π.Rmoy
telle que V.S = 2,35.10-4 m3 .s-1
soit ∆ z = 0,0715 m
Cette distance entre la partie supérieure du condensateur et la boite externe est trop
importante.
En la divisant par deux, la vitesse de l’eau double et h = 288,7 W m-2 .K-1 , qui est du même
ordre de grandeur que la valeur de h pour la partie latérale.
Le choix est donc le suivant:
- Géométrie changée : ∆ z = 0,0357 m
- Vitesse de l’eau 0,008 m.s -1
- Débit de 14,12 l.min-1
- Valeur de h 288,7 W m-2 .K-1
- Pression de l’eau, 1 bar.
Alan TENZA GT promo2003_____________________________________Page 45 sur 79
Association
EURATOM -CEA
3.2.1.5. Résultats avec CASTEM2000.
Le logiciel CASTEM2000est utilisé pour voir le comportement du système en régime
permanent, et donc vérifier que les températures atteintes ne sont pas trop élevées, et que les
gradients de température sont répartis de façon homogène.
Hypothèses de travail :
Les dimensions géométriques du condensateur sont données en mm sur la figure3.2.a :
Les calculs sont effectuer avec les simplifications suivantes :
- Le courant est considérer constant sur chaque électrode même si le courant varie d’une
électrode à l’autre ;
- Le courant passe sur toute la longueur des électrodes comme si les électrodes étaient
emboîtées à fond ;
- A l’exception du diélectrique en céramique, tous les éléments sont en cuivre ;
- La modélisation du fluide n’est pas réaliser, j’impose deux coefficients d’échange h
constants obtenus avec les calculs des pages précédentes, et j’impose aussi une
température de fluide constante (25°C ou 150°C) ;
- La surface inférieure du support des électrodes fixes est maintenue à 150°C ;
- Le système présentant une symétrie axiale, j’utilise un modèle en deux dimensions ;
- On étudiera le régime stationnaire.
Les grandeurs caractéristiques des matériaux sont les suivantes :
Résistivité du cuivre = 2.10-8 ς.m.
Conductivité thermique du cuivre = 370 W.m-1 .K-1 .
Conductivité thermique de la céramique = 30 W.m-1 .K-1 .
Conductivité thermique de l’inox = 17,5 W.m-1 .K-1 .
(Valeurs moyennes à 300°C)
Le maillage :
On travail en deux dimensions avec le mode « axisymétrique » qui permet de revenir en trois
dimensions par rotation du système autour de son axe de symétrie. Les éléments finis sont des
quadrangles à 8 nœuds.
Modèle thermique
On exprime les différents flux :
Ø Celui dû aux neutrons = 0,8 W.m-3
I2
Ø Celui dû au passage du courant, en utilisant la formule Plin = r (par unité de
4Sdd
longueur).
Alan TENZA GT promo2003_____________________________________Page 46 sur 79
Association
EURATOM -CEA
Les flux surfaciques sont appliqués sur les lignes représentant les surfaces des électrodes qui
sont face chacune à une autre électrode, et le refroidissement est représenté par la condition
suivante :
La surface extérieure (opposées aux électrodes) de la plaque reliant les électrodes fixes
est maintenue à 150°C (condition aux limites).
La surface extérieure (opposées aux électrodes) de la plaque reliant les électrodes
mobiles est en contact avec l’eau à 25°C, avec un coefficient d’échange de chaleur par
convection h = 291,7 W.K-1 .m-2 .
La surface externe du soufflet est en contact avec de l’eau à 25°C (échauffement de
l’eau à 100°C), avec un coefficient h = 143,3 W.K-1 .m-2 .
Modèle utilisé pour le courant
On utilise le même modèle que précédemment c’est à dire une approximation définie par :
Calculs des courants Iext et Iint :
n −−1
I1,int = 0 et pour n >1 In ,int = ∑ ak , k ++1 Ic
k ==1
Cn , n ++ 1
Avec an , n ++1 =
Ctotale
n
IN , ext = Ic et pour n<N In , ext = ∑ ak , k ++ 1 Ic
k ==1
On utilisera plus loin un autre code de calcul (logiciel ANSYSS) pour calculer la distribution
de courants car CASTEM2000 ne le permet pas.
Aspect mécanique
Les variations spatiales de température sont à l’origine de contraintes thermiques dues au
besoin de dilatation de la structure.
Dans CASTEM un opérateur calcule les contraintes associées à un champ de température.
Un autre opérateur calcule une contrainte équivalente à un champ de contraintes
On obtient les résultats suivants :
Alan TENZA GT promo2003_____________________________________Page 47 sur 79
Association
EURATOM -CEA
Les résultats sont les suivants
Figure 3.2.1.5.b : Champ de température du condensateur avec un refroidissement à eau
Alan TENZA GT promo2003_____________________________________Page 48 sur 79
Association
EURATOM -CEA
Figure 3.2.1.5.c. : contraintes de Von Mises (max = 142,9 Mpa).
Analyse des résultats
- La température maximale atteinte est de 255°C, qui est bien en accord avec les résultats
trouvés en partie 2 du rapport.
- Le soufflet présente une variation de température acceptable de 50°C entre le haut et le
bas, au delà de 100°C les contraintes auraient été trop importantes.
- La partie la plus chaude est bien située vers les électrodes extérieures( ayant le plus grand
rayon)là où le courant est le plus fort.
- Sur la partie supérieure du soufflet, au niveau de la soudure, les contraintes sont
importantes, 142,9 MPa pour la valeur maximum. Il y aura donc des déformations à ce
niveau si la géométrie choisie est celle illustrée ci dessus. Cependant, pour garder un
modèle simple, je n’ai pas tenu compte de la présence de renfort sur le soufflet qui devrait
permettre d’éviter les déformations.
- Température du fluide à la paroi : T = (Tparoi + T fluide)/2
T = (170+25)/2 = 97,5°C
T < Tébullition = 100°C
Les champs de températures et de contraintes montrent donc que le système pourra
fonctionner.
3.2.2. Refroidissement par hélium
On étudie ici un système de refroidissement par hélium gazeux car celui présente plusieurs
avantages :
L’avantage du refroidissement par hélium est que une fuite dans l’enceinte du
tokamak du fluide refroidissant en cas de rupture du circuit de refroidissement, pourrait
facilement être détectée, arrêtée et évacuée par le système de pompage du tokamak sans
causer des dégâts permanentes à l’intérieur de l’enceinte. Il n’y aurait pas de nécessité
d’ouvrir l’enceinte à vide et donc pas de période d’arrêt.
Du point de vue thermique, ce gaz a en outre une bonne conductivité thermique, ce qui
lui permet de recevoir efficacement la chaleur.
Enfin, possédant une masse volumique faible, comparé aux autres gaz, l’écoulement
d’hélium ira plus facilement dans les cavités de la structure à refroidir. Il n’est pas nécessaire
pour avoir ce résultat, d’avoir un régime turbulent et donc d’atteindre des vitesses très
élevées. Pour un gaz comme de l’air, le régime devrait être fortement turbulent pour arriver au
même résultat.
Alan TENZA GT promo2003_____________________________________Page 49 sur 79
Association
EURATOM -CEA
3.2.2.1. Données thermodynamiques
1 bar
Chaleur spécifique Cp = 5200 J.kg-1 .K-1
Diamètres hydrauliques Dh = 0,239 m pour la partie supérieure
Dh = 0,023 m pour la partie latérale
-5 -1 -1
Viscosité dynamique µ = 2.10 kg.m .s .
Conductivité thermique λ = 0,1434 W.m-1 .K-1
-3
Masse volumique ρ = 0,1616 kg.m
Pr (nombre de Prandtl) = 0,73
2 bars
-5 -1 -1
µ = 2.10 kg.m .s .
-1 -1
λ = 0,1434 W.m .K (même valeur que pour 1 bar)
-3
ρ = 0,32313 kg.m
Pr (nombre de Prandtl) = 0,73
10 bars
-5 -1 -1
µ = 2.10 kg.m .s .
-1 -1
λ = 0,155 W.m .K ( ~ valeur à 1 bar + 10%)
-3
ρ = 1,616 kg.m
Pr (nombre de Prandtl) = 0,67
3.2.2.2. Formules utilisées
Pour le Re et h, on utilise les formules :
N .l
h= u
Dh
r .v .Dh v .Dh
Re = =
m u
On utilise les corrélations choisis précédemment pour l’eau qui reste valable pour le gaz.
v Sur une plaque plane :
Si Re < 400 000 Nu = 0,664. Re1 / 2 Pr 1 / 3
Si Re > 400 000 Nu = 0,035. Re 4 / 5 Pr 1 / 3 [4]
v Dans un espace annulaire concentrique:
0 ,14
de
Nu = 0,023.Re 0 ,8
Dh
1/ 3
. Pr .
[5]
di
Alan TENZA GT promo2003_____________________________________Page 50 sur 79
Association
EURATOM -CEA
Lorsque l’on trace les courbes représentant la valeur de h en fonction de la vitesse de l’hélium
et de la géométrie, on s’aperçoit que :
-
L’hélium à 1 bar ne convient pas, à V = 15 m.s-1 , h = 87 W.K-1 .m-2 ,au niveau de la partie
supérieure, et h = 74 W.K-1 .m-2 au niveau de la partie latérale. Alors que nous avons
besoin d’une valeur proche de 200 W.K-1 .m-2
- L’hélium à 2 bars ne convient pas, à V = 15 m.s-1 , h = 123,5 W.K-1 .m-2 , au niveau de la
partie supérieure, et h = 129,3 W.K-1 .m-2 au niveau de la partie latérale.
L’hélium à 10 bars sera employé.
Dimensionnement du système avec l’hélium à 10 bars
Vitesses nécessaires :
Pour les mêmes raisons que pour l’eau, nous avons besoin d’un coefficient h de valeur au
moins égale à 200 W.K-1 .m-2 .
Le graphe représentant les valeurs de h en fonction de la vitesse et de la géométrie de
l’écoulement, montre que pour atteindre des valeurs de 200 W.K-1 .m-2 :
- l’hélium doit circuler à une vitesse de 7,1 m.s -1 pour la partie supérieure du
condensateur, on aura alors h = 200,5 W.K-1 .m-2 .
- à 4,838 m.s -1 pour la partie latérale (soufflet) du condensateur, on aura alors
h = 200 W.K-1 .m-2 .
Débit nécessaire :
Ainsi, la section de passage de l’hélium de la partie latérale étant de S = 0,00905 m², le débit
nécessaire pour atteindre 4,838 m.s-1 est
Q = VS = 4,838*0,00905
Q = 0,04378 m3 .s-1
Soit encore Q = 2627 l.min-1 .
Dimensions requises :
Avec un tel débit, la section de passage de l’hélium sur la partie supérieure du condensateur
doit être :
VS = Q => S = Q/V => ∆ z.2. π Rmoy = Q/V
Avec Rmoy = 0.131 / 2 m, Q = 0,04378 m3 .s-1 et V = 7,1 m.s-1 ,
on obtient :
∆ z = 0,015 m
Les choix sont donc:
- pression de l’hélium de 10 bars .
- débit d’hélium de 2627 l.min-1 .
- géométrie inchangée au niveau de la partie latérale.
- géométrie changée au niveau de la partie supérieure, l’espacement entre le plateau
supérieur reliant les électrodes mobiles et l’enceinte externe est ∆ z = 0,015 m.
Alan TENZA GT promo2003_____________________________________Page 51 sur 79
Association
EURATOM -CEA
3.3. Conc lu s io n, mod è le “end of coax”
Le système étudié peut sans difficulté majeure être refroidi par eau à1 bar, 25°C ou avec de
l’hélium à 10 bars, 50°C.
Les températures atteintes ( de l’ordre de 250°C) permettent au système de fonctionner
correctement.
On vérifie bien que les électrodes sont à des températures assez proche et pas très élevées, ce
qui permet de négliger les échanges thermiques par rayonnement.
Cependant il aurait été intéressant pour obtenir des résultats plus précis, de modéliser
l’écoulement du fluide de refroidissement pour tenir compte de la variation du coefficient h et
de l’élévation de température du fluide.
Toutefois le modèle reste correct et donne des résultats qui permettent de conclure sur la
faisabilité du système.
Alan TENZA GT promo2003_____________________________________Page 52 sur 79
Association
EURATOM -CEA
4. ETUDE COUPLEE ELECTROMAGNETIQUE-THERMIQUE DU
MODELE « PROTO ITER 2005 » SUR ANSYS.
Une série d’analyses FEM en 3D est en cours pour valider l’étude de l’antenne « Proto ITER
2005(Figure 4.2.1).
• Une analyse électromagnétique à basse fréquence étudie la distribution de courants de
Foucauld induites dans l’antenne par les phénomènes de disruption du plasma,
calcules les charges électromagnétiques (JxB) et analyses les contraints et les
déformations de la structure mécanique.
• Une analyse électromagnétique à haute fréquence (HF) calcule les champs électriques,
magnétiques, les paramètres de transmission HF (S parameters) de l’antenne, et la
distribut ion des courants HF en tous les points de la structure. A partir de la
distribution des courants HF, la déposition de puissance HF dans les différents
composants de l’antenne peut être calculée et couplée à une analyse thermique.
Le logiciel ANSYS permet le développement de ces analyses couplées en utilisant un seul
modèle géométrique. C’est pourquoi ce logiciel à été choisi pour l’analyse globale de
l’antenne.
Dans cette partie, nous allons réaliser une étude où l’analyse thermique du condensateur
d’accord est couplée à une analyse HF du même composant qui calcule la déposition de
puissance dans ce condensateur.
L’analyse thermique sera plus précise notamment car les sources principales de chaleurs que
sont les courants, seront calculées par le logiciel. Dans les parties précédentes du rapport, la
distribution de courant était imposée, sur chaque électrode le courant était constant sur toute la
longueur, ce qui n’est pas le cas en réalité.
Figure 4.a : coupe d’un condensateur de l’antenne « FCI Proto ITER 2005 »
Alan TENZA GT promo2003_____________________________________Page 53 sur 79
Association
EURATOM -CEA
4.1. Présentat ion d’A NSYS
Le logiciel ANSYS est un outil de développement en analyse d'ingénierie. La méthode
utilisée est celle des éléments finis, permettant l'analyse d'assemblages complexes et les
simulations en conditions réalistes.
Il permet la modélisation de structures, d’écoulements, de systèmes complexes voire couplés
et d'étudier leurs réponses physiques telles que les niveaux de contraintes, les distributions de
température ou l'effet de champs électromagnétiques.
Pour réaliser des analyses il y a deux méthodes principales. L’utilisation du code ou lignes de
commande, et la « Graphic User Interface method » ou méthode graphique.
On peut faire une analyse complète soit
- en écrivant un programme
- en n’utilisant les fenêtres de dialogue
Les deux méthodes sont équivalentes, elles sont deux entrées du logiciel. Il est aisé d’évoluer
de l’une à l’autre, chaque commande effectuer par méthode graphique est transcrite dans un
fichier contenant les lignes de commandes ou code qui réaliseraient le même travail.
Il y a plusieurs phase dans l’exécution d’une analyse
Phase de spécification ou Preprocess
Durant cette phase des données, l'utilisateur choisit le type d'éléments, le système de
coordonnées les constantes et les propriétés des matériaux. On créé des modèles solides et on
les maille, on peut aussi définir des équations de couplage et contraintes.
Différents types de maillage :
v maillage régulier ( brique)
v maillage libre (tétraèdre)
v maillage adaptatif (itératif)
Différents types d’éléments :
Les éléments sont classés en fonction de leur dimension(2D,3D), de leur nombre
d’arêtes et de nœuds (tétraèdres, pavé), et enfin en fonction du domaine physique
auquel appartient la simulation (thermique, mécanique, couplée thermo
électromagnétique…)
Phase de résolution
On choisit le type d’analyse à exécuter.
Le type d'analyse sélectionné détermine les équations qui seront utilisées par le système.
Les catégories disponibles sont :
v structure
v thermique
v fluides
v dynamique des fluides
v électrostatique
v électromagnétique
v champ électrique
v acoustique
v champs couplés : il est possible de résoudre un problème touchant plusieurs domaines
physiques. Par exemple, la thermomécanique, l'hydromécanique, la thermo-
hydraulique.
Alan TENZA GT promo2003_____________________________________Page 54 sur 79
Association
EURATOM -CEA
Chaque catégorie peut encore inclure différents types d'analyses spécifiques, statique ou
dynamique.
Phase d’analyse des résultats
L'utilisateur peut visualiser les résultats en faisant pivoter le solide représentant le modèle
dans tous les sens, en zoomant. Il peut afficher des champs de types valeurs dérivées, qui sont
des données estimées à partir des résultats de l’analyse et qui sont du type flux, énergie,
gradient, sous forme de vecteurs ou de champs de couleurs.
On peut ainsi vérifier la présence de flux, la direction des flux, directement sous forme
graphique.
ANSYS permet aussi d’afficher des résultats sous forme de listes, avec les numéros de
surfaces, éléments ou nœuds et les valeurs correspondantes des grandeurs souhaitées,
température, puissance, champ électrique…
4.2. Le mod è le géométr ique
4.2.1. Définitions
Pour le logiciel ANSYS, il y a une distinction entre le modèle géométrique que je vais
construire et qui est un dessin du système, et le modèle aux éléments finis qui servira de base
au logiciel pour faire les calculs et afficher les résultats.
- Le modèle géométrique est constitué de points (keypoints), de lignes (lines), de
surfaces (areas) et de volume (volume). Pour construire ce modèle, je vais entrer les
coordonnées de certains points, pour ensuite créer des lignes, des sur faces, puis des
volumes. C’est sur ce modèle que seront appliqués les chargements.
- Le modèle aux éléments finis est lui constitué d’éléments et de nœuds. Ces éléments
appartiennent à une liste prédéfinie dans laquelle ils sont classés en fonction de leur
dimension (2D,3D), de leur nombre d’arêtes et de nœuds, et enfin en fonction du
domaine physique auquel appartient la simulation (thermique, mécanique, couplée
thermo-électromagnétique…)
Le modèle géométrique est donc une entrée de données pour le logiciel. Et à partir de celle-ci,
il crée le modèle aux éléments finis, constitué des éléments que nous aurons choisis. Toute
intervention sur la géométrie du système implique une réinitialisation du programme. Celui-ci
devra reprendre la simulation depuis le début pour créer un nouveau modèle aux éléments
finis.
La première étape est de construire le modèle géométrique de notre condensateur.
Pour cela on commence par simplifier le système en ne le représentant qu’en deux
dimensions. Possédant un axe de symétrie, une simple rotation du système autour de cet axe
nous ramènera au système entier (trois dimensions).
L’antenne dans son ensemble, est représenté comme suit, par le logiciel AUTOCAD.
Alan TENZA GT promo2003_____________________________________Page 55 sur 79
Association
EURATOM -CEA
Figure 4.2.1.a : Coupe de l’antenne FCI (fréquence cyclotronique ionique).
On voit en rouge sur la Figure 4.2.1.a., deux condensateurs à capacité variable reliés à deux
lignes coaxiales, et en noir (à gauche), la partie rayonnante de l’antenne, qui est face au
plasma du réacteur.
4.2.2. Eléments modélisés
Le modèle géométrique que nous allons modéliser sera la moitié d’un des deux condensateurs
Port 1
Port 2
Figure 4.2.2.a : coupe de la moitié d’un condensateur de l’antenne « FCI Proto ITER 2005 »
Le modèle crée pour le logiciel a l’allure suivante :
Figure 4.2.2.b : Modèle géométrique de la moitié d’un condensateur Proto ITER 2005 sur ANSYS.
Alan TENZA GT promo2003_____________________________________Page 56 sur 79
Association
EURATOM -CEA
Ce modèle géométrique servira à la construction des modèles aux éléments finis à la fois pour
la partie électromagnétique et pour la partie thermique.
Il est nécessaire de travailler avec un modèle en trois dimensions parce que le phénomène de
propagation par onde est tri-dimensionnel La symétrie cylindrique permet d’étudier un secteur
(5 degrés) au lieu de toute la section.
Ainsi, le modèle en deux dimensions vu sur la page précédente sera développé sur 5 degrés
autour de son axe de symétrie, la simulation électromagnétique sera effectuée, puis la
simulation thermique, sur ce même modèle en trois dimensions.
4.2.3. Choix de la structure d’analyse
Maillage
Le maillage choisi en deux dimensions est un maillage régulier ou « mapped mesh ». C’est à
dire qu’en deux dimensions, les mailles sont des rectangles ou des carrés. Pour cela il est
nécessaire divisé chaque ligne du modèle géométrique et ceci de façon à ce que chaque ligne
ait en face d’elle, une ligne divisée en en même nombre de segment qu’elle- même.
Matériaux
v Tous les matériaux sont en cuivre sauf l’isolant en céramique.
Le fluide de refroidissement est de l’hélium à 10 bars, 120°C.
v Eléments choisis
- Pour le modèle électromagnétique en 3D, le nom du type d’élément est HF119.
Cet élément permet de travailler dans le domaine électromagnétique, en Haute Fréquence.
- Pour le modèle thermique en 3D, l'élément est SOLID87, il a un degré de liberté, la
température, à chaque nœud.
Les deux éléments sont ont la même représentation, ce qui est nécessaire pour le couplage
électromagnétique-thermique. Ils ont tous deux dix nœuds.
Figure 4.2.3.a : représentation des éléments SOLID87 et HF119.
Alan TENZA GT promo2003_____________________________________Page 57 sur 79
Association
EURATOM -CEA
Pour avoir un ordre de grandeur de la taille du condensateur voici quelques valeurs de
longueurs en millimètres des éléments du système :
Figure 4.2.3.b : Quelques cotations du condensateur Proto ITER 2005.
4.3. Mod è le E lectro magnét ique
4.3.1. Conditions, hypothèses.
La dissipation de puissance HF dans le condensateur est du à la présence d’une densité’ de
courant HF sur les surfaces métalliques qui décroît rapidement dans l’épaisseur du métal
(Effet de peau). Aux fréquences de travail, l’épaisseur de peau est d’environ 10 µ m.
La densité de courant est proportionnelle à un faible champ électrique parallèle à la surface
(qui décroît dans l’épaisseur du mental avec la même loi).
Il est donc nécessaire une analyse FEM qui calcule le champ électrique dans le vide, dans les
composants diélectriques et dans les parois métalliques du condensateur
La distribution de courant, est calculée à partir de la distribution de la composante du champ
électrique parallèle à la direction de propagation (Ux) (suivant la relation I = σ Ex , avec σ =
conductivité électrique). La distribution de puissance dissipée est dérivée de la distribution de
courrant avec un calcul de post processing.
- On utilise les valeurs de
perméabilité relative magnétique de l’air = 1
perméabilité relative magnétique du cuivre = 1
perméabilité relative magnétique de la céramique = 1
permittivité de l’air = 1 H.m-1
permittivité du cuivre = 1 H.m-1
permittivité de la céramique = 10 H.m-1
résistivité électrique du cuivre = 2,8.10-8 . Ω .m
- on définit les deux extrémités du système comme des ports de guide d’onde (figure
4.2.2.a). Sur le port 1 on applique 1 MW, sur le port 2 on impose une charge avec une
impédance parfaitement adaptée (pas de réflexion).
- tous les espaces situés entre les conducteurs, est modélisé par de l’air.
Alan TENZA GT promo2003_____________________________________Page 58 sur 79
Association
EURATOM -CEA
4.3.2. Résultats
Les premiers résultats de l’analyse électromagnétique sont les répartitions des champs
électrique et magnétique.
L’ordre de grandeur du module du champ électrique dans le diélectrique est de 10% de la
valeur dans le vide (~1/ εr ). Le module du champ électrique dans le métal est beaucoup plus
bas. Pour visualiser le champ dans le diélectrique et les conducteurs, on supprime l’air et on
obtient les résultats suivants :
Figure 4.3.2.a : répartition de la composante suivant Ux du champ électrique dans le condensateur et ses
composants par ANSYS
On voit sur la figure ci-dessus la répartition du champ électrique dans les conducteurs (cuivre)
et dans la céramique. Il est plus faible dans le cuivre que dans la céramique, dans un rapport
de plus de 100 000, comme le montre la figure 4.3.2.b.
Figure 4.3.2.b. : répartition de la composante suivant Ux du champ électrique dans la céramique par ANSYS.
Alan TENZA GT promo2003_____________________________________Page 59 sur 79
Association
EURATOM -CEA
4.3.3. Le couplage
La simulation électromagnétique terminée, nous créons un programme qui va générer un
fichier qui permettra le couplage avec l’analyse thermique. Ce fichier renferme un vecteur qui
contient la puissance par unité de volume dissipée dans chaque élément du modèle (hors air).
Cette puissance est directement calculée par le logiciel, qui calcul la puissance due à l’effet
Joule.
Lors du changement d’éléments pour passer à l’analyse thermique, l’ordre de numérotation ne
change pas. Ce qui permet d’injecter la puissance due au passage du courant dans le système
en respectant la répartition, simulant ainsi la source principale de chaleur.
4.4. Mod è le T hermique
Les conditions d’analyse sont les suivantes :
- Le fluide de refroidissement est l’hélium, il est à 10 bars, 120°C
- On choisit les valeurs des paramètres définissants les matériaux
Conductivité thermique du cuivre = 370 W.m-1 .K-1
Conductivité thermique de la céramique = 38,9 W.m-1 .K-1
Masse volumique du cuivre = 8700 kg.m-3
Masse volumique de la céramique = 3960 kg.m-3
Masse volumique de l’hélium = 1,61 kg.m-3
Chaleur spécifique de l’hélium = 5200 J.kg-1 .K-1
Chaleur spécifique du cuivre = 400 J.kg-1 .K-1
Chaleur spécifique de la céramique = 880 J.kg-1 .K-1
- On estime les coefficients h d’échange par convection du fluide de refroidissement par
méthode analytique et on imposera ces valeurs sur les surfaces de cuivre en contact
avec le fluide de refroidissement.
- Le chargement représentant les sources de chaleurs dues au passage du courant dans le
cuivre, est réalisé par l’injection dans chaque élément du modèle, d’une puissance
volumique estimée lors de l’analyse électromagnétique.
Alan TENZA GT promo2003_____________________________________Page 60 sur 79
Association
EURATOM -CEA
4.4.1. Description du fonctionnement du système de refroidissement
La figure ci-dessous illustre le passage du fluide de refroidissement qui est de l’hélium. On
note que les passages notés 1, 2, 3 et 4 sont tous de même forme, c'est- à-dire entre deux
cylindres, une seule corrélation sera nécessaire pour le calcul du coefficient d’échange
thermique par convection h.
Température maintenue à 120°C
Electrodes
fixes
Electrodes mobiles
1
2
Figure 4.4.1.a : mise en évidence du passage de l’hélium au niveau du condensateur.
4.4.2. Calculs du coefficient h
Une seule corrélation sera utilisée, celle de Lunberg and al.[4]:
0 ,14
hDh de
q En régime turbulent Nu Dh = 0 ,8
= 0,023. Re . Pr
1/ 3
.
d i
Dh
l
q Et en laminaire le tableau Lundberg et al (annexe3). Donnant la valeur du nombre de
Nusselt en fonction du paramètre Y = diamètre intérieur / diamètre extérieur.
On calcul, les valeurs h1 , h2 , h3 et h4 au niveau des passages notés 1, 2, 3 et 4 et de sections
respectives. S1 , S2 , S3 et S4 .
S1 = π(Rext ²-Rint ²) = 3,19.10-3 m²
S2 = 7,70.10-3 m²
S3 = 3,70.10-3 m²
S4 = 1,40.10-3 m²
Alan TENZA GT promo2003_____________________________________Page 61 sur 79
Association
EURATOM -CEA
On choisit tout d’abord des vitesses de l’ordre du mètre par seconde.
Si en 1 V1 = 2 m.s-1 ,
En 2 V2 = V1 *S1 /S2 = 0,828 m.s-1
En 3 V3 = V2 *S2 /S3 = 1,722 m.s-1
En 4 V4 = V3 *S3 /S4 = 4,562 m.s-1
Alors
Re1 = 3717 Nu1 = 14,64 h1 = 98,7 W.m-2 K-1
Re2 = 1539 Nu2 = 7,23 h2 = 48,72 W.m-2 K-1
Re3 = 3200 Nu3 = 12,99 h3 = 87,53 W.m-2 K-1
Re4 = 8478 Nu4 = 28,32 h4 = 190,83 W.m-2 K-1
4.4.3. Résultats
Avec les valeurs des coefficients h ci-dessus, on obtient des résultats qui montre que le
refroidissement est anormalement efficace.
Figure 4.4.4.a : Champ de température du condensateur avec ANSYS.
La température est quasiment homogène et à 120°C (augmentation maximum de 0,6 °C) qui
est la température du fluide de refroidissement, le système ne chauffe pas.
En diminuant de moitié puis par quatre les valeurs des coefficients h, on obtient une légère
augmentation de température on note seulement une augmentation de 1,6 degrés de la
température maximale.
Alan TENZA GT promo2003_____________________________________Page 62 sur 79
Association
EURATOM -CEA
A la vue de ces résultats, plusieurs interprétations sont possibles,
La source de chaleur ne joue pas son rôle : pas injectée dans les éléments, les unités ne
sont pas correctes,…,
Le refroidissement est mal modélisé : appliqué sur de mauvaises composantes du
système (éléme nts au lieu de nœuds…), les unités ne sont pas respectées…
Les résultats sont corrects et il y a moins de courant que prévu dans les conducteurs.
Il y a une erreur de programmation (syntaxe).
Face à ce problème le modèle thermique a été testé tout seul avec des chargements et des
coefficients des transferts thermiques différents.
Ø Pour vérifier que la source de chaleur injecte bien la puissance, je multiplie par 10 la
variable du programme qui désigne la puissance volumique à injecter dans chaque élément,
avec les coefficients h divisés par quatre.
La température a globalement augmenté, jusqu’à 140°C, donc un chargement est
appliqué, bien qu’on soupçonne un problème d’échelle..
Ø
Pour découpler les problèmes de chargement thermique de celui de la conduc tion de
chaleur on injecte dans chaque élément une densité de puissance constante de 1 MW/m3
Les coefficients de convection h sont ceux estimés au départ.
Les résultats sont les suivants :
Figure 4.4.4.f : champ de température avec une source de chaleur homogène et les coefficients h estimés au
départ.
La température atteint des valeurs raisonnables, de l’ordre de grandeur à celles que l’on
s’attend à avoir avec le passage d’un fort courant.
Ainsi, le problème semble venir des valeurs de la puissance dissipée dans les conducteurs
fournies par l’analyse électromagnétique. Ces valeurs sont trop faibles, et ne reflète pas la
réalité.
Alan TENZA GT promo2003_____________________________________Page 63 sur 79
Association
EURATOM -CEA
Alan TENZA GT promo2003_____________________________________Page 64 sur 79
Association
EURATOM -CEA
4.5. Conc lu s io n
• L’analyse globale électromagnétique/thermique du condensateur ITER proto 2005 n’a
pas pu être conclue avant la fin du stage pour manque de temps et sera continue sur la base
des résultats acquis.
• Les tests de validité faits jusqu’à maintenant semblent montrer qu’il y a un problème
d’interface entre la section électromagnétique et la section thermique.
• Je pense que pour finir cette étude il est nécessaire après avoir résolu le problème du
programme, d’approfondir les modélisations. Il faudrait simuler l’écoulement du fluide de
refroidissement pour que le logiciel estime aussi les champs de valeurs du coefficient h et
l’évolution de la température du fluide.
• Il sera nécessaire aussi de faire varier les valeurs des paramètres des matériaux en
fonction de la température, aussi bien pour la partie électromagnétique que pour la partie
thermique.
• Pour terminer cette étude, il faudra utiliser les résultats obtenus par l’étude couplée
pour simuler le comportement mécanique de la structure et valider le projet.
Alan TENZA GT promo2003_____________________________________Page 65 sur 79
Association
EURATOM -CEA
SYNTHESE, BILAN DU S TAGE.
• Les limites de temps pour l’apprentissage des deux logiciels CASTEM et ANSYS ne
m’ont permis d’approfondir que l’aspect thermique de la modélisation FEM. En effet
un couplage thermo- hydraulique m’aurait permis à la fois de modéliser le fluide de
refroidissement puis obtenir un champ de valeur de h, et modéliser le condensateur
pour obtenir le champ de température.
• Les analyses faites à l’aide du logiciel CASTEM montre qu’il est possible de refroidir
la partie de l’antenne FCI lorsqu’elle est en fonctionnement.
• Avec de l’eau à 1 bar, 25°C ou de l’hélium à 10 bars, 50°C, les températures
maximales atteinte sont de l’ordre de 270°C, ce qui ne détériore pas l’antenne et
permet un bon fonctionnement.
• L’analyse ANSYS électromagnétique thermique, bien qu’incomplète aujourd’hui,
formera la base de la modélisation thermo-hydraulique de l’antenne ITER Prototype
2005.
En conclusion, ce stage m’a apporté de nombreuses connaissances dans le domaine du
dimensionnement. Je pourrais rencontrer à nouveau les outils que j’ai utilisés pour mon étude
dans d’autres secteurs ou il sera question de dimensionnement, ou de recherche. Dans ce sens
ce stage m’a beaucoup apporté. Désirant m’orienter vers une carrière plus technique que
tourné vers l’administratif ou le management pur, je suis sûr de revenir sur des travaux du
même type que ceux réalisés pendant ce stage.
Alan TENZA GT promo2003_____________________________________Page 66 sur 79
Association
EURATOM -CEA
Références
[2] J.M. Brébec, Ondes, éd. Hachette, 1997.
[1] G. Bosia, “High Power Density Ion Cyclotron Antennas for Next Step Applications”,
Fusion Science and Technology 43-153, (2003)
[3] S. Brémond, G. Bosia, ICRF antenna and system design, EFDA Contract 02/676
Intermediat Report, 2003.
[4] Techniques de l’ingénieur (plaque plane)
[5] Techniques de l’ingénieur (L. et al)
[6] Techniques de l’ingénieur (Reither)
Alan TENZA GT promo2003_____________________________________Page 67 sur 79
Association
EURATOM -CEA
TABLE DES ANNEXES
ANNEXE 1 Organigramme du CEA page 68
ANNEXE 2:Principles pf operation of the ITER-like matching scheme page 69
ANNEXE 3: Valeurs du nombre de Nusselt dans un espace annulaire concentrique
page 72
ANNEXE 4: listing du programme sous CASTEM 2000 page 73
Alan TENZA GT promo2003_____________________________________Page 68 sur 79
Association
EURATOM -CEA
ANNEXE 1 Organigramme du CEA
Administrateur
Haut général
commissaire
Cabinetde
Administrateur
l'administrateur
général adjoint
général
Institut national
Inspection Etablissement
desscienceset
générale siège
techniquesnucléaires
Pôlerecherche Directions
Pôledéfense Pôlenucléaire Pôlerecherche
technologique focntionnelles
Directiondes Directionde Direction de la Directiondes Directiondes
applications militaires l'énergie nucléaire recherchetechnologique sciencesdelamatière sciencesduvivant
Centre Centre Centre Unités
duCesta deCadarache deFontenay-aux-roses implantées
Centre Centre Centre
DAM-IledeFrance deSaclay deGrenoble
Centre Centre
du ripault deValrho
Centre
deValduc
Alan TENZA GT promo2003_____________________________________Page 69 sur 79
Association
EURATOM -CEA
ANNEXE 2:Principles pf operation of the ITER-like matching scheme
The layout of the circuit is shown in Figure 2.1.2.c. This configuration is electrically similar
to the “conventional” RDL, but the tuning capacitors are moved to the strap input. The
advantage of this layout is that now both half sections are connected, at one end, to ground
potential. This makes them self supporting and it simplifies water cooling.
The input impedance of the tuned half-sections can be written as:
Z in,k = R L,k +i (X L,k+ XsL,k ) (k = 1,2) 2)
where R L,k are the strap resistances, XL,k the strap reactances, and XsL,k the capacitive tuning
reactances.
The RDL input admittance is:
Yin = Yin 1 +Y in 2 = (G in 1 + G in 2)+i (B in 1 +B in 2 ) 3)
with:
G in,k = Re(Y in k) =RL k/(RL k2 +Xk2 ) 4)
Bin,k = Im(Yin k)= Xk/(RL.k2 +Xk2 )
and:
Xk = (X Lk+XsLk). 5)
The perfect match conditions:
Re (Y in1+ Y in 2 ) = G0 =1/R0 6)
Im(Y in 1+ Y in 2 )= 0 7)
where R0 is the selected input impedance of the RDL, can be solved for the two match
variable X1 and X2 :
XM1 = – (±R0 {(1-rL1 ) /(1-rL2 ) [( rL1+ rL2 ) - rL1 rL2] }1/2 ) 8)
X M 2 = +(± R0 {(1-rL1 )/(1-rL2 )[( rL1+ rL2 ) - rL1 rL2] }1/2 ) 9)
with r l,k = RLk/ R0 .
For a symmetric load on the two straps (RL1 = RL2 = RL), equations 7) and 8) reduce to:
XMk(RL,R0 )= ± RL ( 2 / rL - 1)1/2 10)
with the condition:
R0 /RL > ½ 11)
which is always satisfied in practical cases, leading to two solutions for the tuning reactances:
XMs k (RL, R0 ,XL)= - XL ± RL ( 2 / rL - 1)1/2 12)
and to two complex conjugate values of the input admittances:
Yin (RL,R0 ) = 1/ R0 [1± ( 2/ rL - 1)1/2 )] 13)
Alan TENZA GT promo2003_____________________________________Page 70 sur 79
Association
EURATOM -CEA
whose imaginary parts cancel out when paralleled.
Sensitivity to load variatio ns
An important feature of an IC launcher is its capability of accepting load variations without
the need of re-matching. In some reactor-relevant modes of operation, fast periodic
relaxations (ELMs) flatten the scrape-off- layer density profile and increase the antenna
coupling. Load variations up to 500% are common in type I ELMy plasmas 1,2 . As typical
relaxation time (< 1 ms) and frequency (several tens of Hz) exceed the response time of
existing adaptive tuning systems, ELMs significantly limit the power flow in current IC
systems.
The ITER- like antenna schemes proposed above are much more tolerant to resistive load
variations than the original RDL scheme, if the input resistance at perfect match R0 (in
principle arbitrary) is properly selected. This is generally possible over a wide range of loads.
To first order approximation, and considering again for simplicity the case RL.1 = RL.2,= RL,
the input admittance of a parallel RDL, matched at RL =RM, with G0 =1/R0 is essentially a real
quantity and varies with RL as:
Yin (RL,RM,R0 ) @ Gin (RL,RM,R0 )=2RL/(RL2 +XM2 ) 26)
with:
XM2 (R0 ,RM)=RM (2R0 -RM) 27)
(equation 10) since the susceptances of the two half sections cancel out for any RL.
For a real load, the voltage standing wave ratio (VSWR) is simply:
S =Yin (RM,R0 )/Yin (RL,RM,R0 ) for RL<RM 28)
S = Yin (RL,RM,R0 )/Yin (RM,R0 ) for RL>RM 29)
where
Yin (RM,R0 )=2RM /(RM2 +XM2 ) 30)
is the input admittance at perfect match.
S is plotted in Figure 6 as a function of RL, for increasing values of R0 and for RM=2.0 W.
These values are relevant to ITER design (see Section 7 below). From Figure 6 it is apparent
that this antenna scheme is very tolerant to load variations at low input impedance.
The input VSWR monotonically decreases for low values of RL and, in the range RL>RM, has
a maximum for RL= |X M|=[RM (2R0 -RM)] 1/2 , where it reaches the value :
1
Noterdaeme J.-M.et al., ''Changes in the Edge Plasma due to ELMs, a Study using Coupling Measurements in
the ICRF Range'', Control. Fusion and Plasma Phys., (21st EPS Conf., Montpelier, 1994), Vol. 18B, (E. Joffrin,
P. Platz and P.E. Stott eds.), EPS (1994) 842-845.
2
Bhatnagar V.P. et al., “A Comparison of ELMs Characteristics Between ICRH and NBI Heated H-Mode
Discharges in JET”, Proceedings of the Twenty-Fourth EPS Conference on Controlled Fusion and Plasma
Physics, Berchtesgaden, Ge rmany, (1997), paper P1.020.
Alan TENZA GT promo2003_____________________________________Page 71 sur 79
Association
EURATOM -CEA
Smax=R0 /XM 31)
2
RM XM
0 R0= 30 W
S max
Voltage standing rwave ratio
1.75 1
R0= 22 W
1.5 R0= 14 W
.
S max
1.25 0
R0= 6 W
1
1.35 2.69 4.03 5.36 6.7
Load resistance (ohm)
Figure 6. Voltage standing wave ratio for perfect match at R=RM and for ITER relevant values of RL and R0
Using the two parameters RM and R0 , it is straightforward to select a range of load resistances
where the input VSWR remains below the value acceptable to the power source. RM should be
first selected so that S is below the acceptable limit for the minimum load resistance (imposed
by plasma coupling and transmission line losses). The RDL input admittance R0 should then
be set so that also the maximum value of S in the range RL>RM is lower than the accepted
value. The antenna would then remain matched in the whole load range. The ITER- like
antenna scheme is also tolerant to reactive load variations, as
6.22
X1 ( Ω ) 1.04 1.05 1.06 1.07 1.08 1.09 1.1 1.11
1.04 1.03
5.94 1.04
1.03 1.02 a
1.03
1.05
1.02 1.05 1.06
1.07
1.01
5.66 1.01 1.02
1.04
1.04
1.03 1.03
1.07 1.06
1.05 1.02
5.37
1.04 1.03
1.12 1.11 1.1 1.09 1.08 1.07 1.06 1.05 1.04
5.09
6.22 5.94 5.66 5.37 5.09
SWR
X2 ( Ω )
Figure 7 Input VSWR as function of arbitrary variations of the load reactance up to 10% around perfect match
(X1 = -X2 = XM= 5.66 Ω )
Alan TENZA GT promo2003_____________________________________Page 72 sur 79
Association
EURATOM -CEA
ANNEXE 3: Valeurs du nombre de Nusselt dans un espace annulaire concentrique
Alan TENZA GT promo2003_____________________________________Page 73 sur 79
Association
EURATOM -CEA
ANNEXE 4: listing du programme sous CASTEM 2000
************************************************************************
* condensateur antenne FCI "captot6.dgibi" (Tenza Alan / 15/04/03 )
* en cuivre et en inox - courant constsant
* refroidi par eau a 150 deg C - regime permanent
************************************************************************
*ooooo options de maillage
opti echo 1;
opti dime 2;
opti elem qua8;
opti isov surf;
opti trace psc ;
*opti trace x;
opti mode axis ;
*ooooo M A I L L A G E
*PRAMETRES GEOMETRIQUES*********
CONSTRUCION DU MODELE : POINTS-LIGNES-SURFACES-D2COUPAGE-MAILLAGE.
*titr 'tout';
*trac (tout coul vert) ;
************************************************************************
*ooooo F L U X T H E R M I Q U Eooooooooooooooooooooooooooooooooooooooo
************************************************************************
* parametres HF
freq = 55.e6 ;
rpo = 2.5E-8;
Epai = 3.e-3 ;
* dimensions géométriques longueurs electrodes, support
* rayons electrode
R1 = 95.87E-3;
R2 = 76.74e-3;
R3 = 58.02e-3;
R4 = 39.85e-3;
R5 = 22.5e-3;
Rx1 = 86.41E-3;
Rx2 = 67.47e-3;
Rx3 = 49.e-3;
Rx4 = 31.18e-3;
* epaisseur de peau
Epeau = ((4*3.14*3.14*freq*(1E-7))**(-0.5))*((rpo)**(0.5)) ;
list Epeau ;
* courant par électrode(numerotation extr -> intr)
Ie1 = 1500. ;
Ii1 = 1500. ;
Ie2 = 1216.2 ;
Ii2 = 970.4 ;
Ie3 = 739.3 ;
Ii3 = 543.9 ;
Ie4 = 365.5 ;
Ii4 = 220.4 ;
Ie5 = 94.7 ;
Ii5 = 0. ;
Ixe1 = 1500. ;
Ixi1 = 1216.2 ;
Ixe2 = 970.4 ;
Alan TENZA GT promo2003_____________________________________Page 74 sur 79
Association
EURATOM -CEA
Ixi2 = 739.3 ;
Ixe3 = 543.9 ;
Ixi3 = 365.5 ;
Ixe4 = 220.4 ;
Ixi4 = 94.7 ;
*Flux HF (en W/m²)
* sur les electrodes
Flu1e = (rpo*(Ie1**2.))/(Epeau*((2.*3.14159*(R1+(Epai/2.)))**2.)) ;
Flu1i = (rpo*(Ii1**2.))/(Epeau*((2.*3.14159*(R1-(Epai/2.)))**2.)) ;
Flu2e = (rpo*(Ie2**2.))/(Epeau*((2.*3.14159*(R2+(Epai/2.)))**2.)) ;
Flu2i = (rpo*(Ii2**2.))/(Epeau*((2.*3.14159*(R2-(Epai/2.)))**2.)) ;
Flu3e = (rpo*(Ie3**2.))/(Epeau*((2.*3.14159*(R3+(Epai/2.)))**2.)) ;
Flu3i = (rpo*(Ii3**2.))/(Epeau*((2.*3.14159*(R3-(Epai/2.)))**2.)) ;
Flu4e = (rpo*(Ie4**2.))/(Epeau*((2.*3.14159*(R4+(Epai/2.)))**2.)) ;
Flu4i = (rpo*(Ii4**2.))/(Epeau*((2.*3.14159*(R4-(Epai/2.)))**2.)) ;
Flu5e = (rpo*(Ie5**2.))/(Epeau*((2.*3.14159*(R5+(Epai/2.)))**2.)) ;
Flu5i = (rpo*(Ii5**2.))/(Epeau*((2.*3.14159*(R5-(Epai/2.)))**2.)) ;
flu1xe = (rpo*(Ixe1**2.))/(Epeau*((2.*3.14159*(Rx1+(Epai/2.)))**2.)) ;
flu1xi = (rpo*(Ixi1**2.))/(Epeau*((2.*3.14159*(Rx1-(Epai/2.)))**2.)) ;
flu2xe = (rpo*(Ixe2**2.))/(Epeau*((2.*3.14159*(Rx2+(Epai/2.)))**2.)) ;
flu2xi = (rpo*(Ixi2**2.))/(Epeau*((2.*3.14159*(Rx2-(Epai/2.)))**2.)) ;
flu3xe = (rpo*(Ixe3**2.))/(Epeau*((2.*3.14159*(Rx3+(Epai/2.)))**2.)) ;
flu3xi = (rpo*(Ixi3**2.))/(Epeau*((2.*3.14159*(Rx3-(Epai/2.)))**2.)) ;
flu4xe = (rpo*(Ixe4**2.))/(Epeau*((2.*3.14159*(Rx4+(Epai/2.)))**2.)) ;
flu4xi = (rpo*(Ixi4**2.))/(Epeau*((2.*3.14159*(Rx4-(Epai/2.)))**2.)) ;
*sur supports
Flu1 = (rpo*(Ie1**2.))/(Epeau*((2.*3.14159*(abc))**2.)) ;
Flu3 = 388. ;
Flu4 = 0. ;
* sur tout (neutrons)
Flu2 = 0.8 ; COMM W/m**3
list (flu1e + Flu1i) ;
list (flu2e + Flu2i) ;
list (flu3e + Flu3i) ;
list (flu4e + Flu4i) ;
list (flu5e + Flu5i) ;
list (flu1xe + Flu1xi) ;
list (flu2xe + Flu2xi) ;
list (flu3xe + Flu3xi) ;
list (flu4xe + Flu4xi) ;
list flu1 ;
list flu2 ;
list flu3 ;
*ooooo M O D E L E et M A T E R I A U oooooooooooooooooooooooooooooooooooooo
* Creation des modèles******************************************************
modcapa = mode capa thermique isotrope;
modsup = mode support thermique isotrope;
modceram =mode ceram thermique isotrope;
modcapax = mode capax thermique isotrope;
modsocle = mode socle thermique isotrope;
modtot1 = modcapa et modsup et modceram et modsocle et modcapax ;
mod1 = mode surfinox thermique isotrope;
mod2 = mode surfcu thermique isotrope;
mod3 = mode (ls1tot et lb4) convection ;
mod4 = mode (lhh3 et lhh4 et lh5 et lhh7) convection ;
mod5 = mode lbb2 convection ;
modtot2 = mod1 et mod2 ;
modtot3 = mod3 et mod4 et mod5 ;
modtot = modtot2 et modtot1 et modtot3 ;
Alan TENZA GT promo2003_____________________________________Page 75 sur 79
Association
EURATOM -CEA
modtott = modtot2 et modtot1 ;
*trac (ls1tot et lb4 ET lhh3 et lhh4 et lh5 et lhh7 et lbb2);
* Creation/choix des materiaux************************************************
* l'inox est recouvert d'une couche de cuivre**
matcapa = mate modcapa 'K' 370. 'C' 385. 'RHO' 8700. ;
matsup = mate modsup 'K' 370. 'C' 385. 'RHO' 8700. ;
matcapax = mate modcapax 'K' 370. 'C' 385. 'RHO' 8700. ;
matsocle = mate modsocle 'K' 370. 'C' 385. 'RHO' 8700. ;
matceram = mate modceram 'K' 30. 'C' 870. 'RHO' 3900. ;
mattot1 = matcapa et matsup et matceram et matsocle et matcapax ;
*mat1 = mate mod1 'K' 17.5 ;
mat1 = mate mod1 'K' 370. ;
mat2 = mate mod2 'K' 370. ;
* hélium
mat3 = mate mod3 H 205. ;
* eau
*mat3 = mate mod3 H 338. ;
* hélium
mat4 = mate mod4 H 288. ;
* eau
*mat4 = mate mod4 H 256. ;
mat5 = mate mod5 H 20. ;
mattot2 = mat1 et mat2 ;
mattot3 = mat3 et mat4 et mat5 ;
mattot = mattot2 et mattot1 et mattot3 ;
mattott = mattot2 et mattot1 ;
* Définition du blocage thermique*********************************************
cl1 = bloq l100a t ;
fcl1 = depi cl1 150. ;
*definition flux *************************************************
fx1e = flux modcapa flu1e (l4 et l5) ;
fx2e = flux modcapa flu2e (l7 et l8) ;
fx3e = flux modcapa flu3e (l10 et l11) ;
fx4e = flux modcapa flu4e (l13 et l14) ;
fx5e = flux modcapa flu5e (l16 et l17) ;
fx1i = flux modcapa flu1i (l6 ) ;
fx2i = flux modcapa flu2i (l9 ) ;
fx3i = flux modcapa flu3i (l12 ) ;
fx4i = flux modcapa flu4i (l15) ;
fx5i = flux modcapa flu5i (l18) ;
fxx1e = flux modcapax flu1xe (lx1 et lx4) ;
fxx2e = flux modcapax flu2xe (lx5 et lx8) ;
fxx3e = flux modcapax flu3xe (lx9 et lx12) ;
fxx4e = flux modcapax flu4xe (lx13 et lx16) ;
fxx1i = flux modcapax flu1xi (lx3 ) ;
fxx2i = flux modcapax flu2xi (lx7 ) ;
fxx3i = flux modcapax flu3xi (lx11) ;
fxx4i = flux modcapax flu4xi (lx15) ;
fx6 = flux modtott flu2 ( tout ) ;
fx3 = conv mod3 mat3 t 25. ;
fx4 = conv mod4 mat4 t 25. ;
fx5 = conv mod5 mat5 t 25. ;
fx1 = flux mod1 flu1 ls11tot ;
fx7 = flux mod1 flu3 lhh3 ;
fx2 = flux mod2 flu1 (lqq2 et lqq4 ) ;
Alan TENZA GT promo2003_____________________________________Page 76 sur 79
Association
EURATOM -CEA
fxe = fx1e et fx2e et fx3e et fx4e et fx5e ;
fxi = fx1i et fx2i et fx3i et fx4i et fx5i ;
fxxe = fxx1e et fxx2e et fxx3e et fxx4e ;
fxxi = fxx1i et fxx2i et fxx3i et fxx4i ;
flutot1 = fxi et fxe et fx6 et fxxe et fxxi;
flutot2 = fx1 et fx2 et fx3 et fx4 et fx5 et fx6 et fx7 ;
flutot = flutot2 et flutot1 et fcl1 ;
***************resolution*******************
cond11 = cond modtot1 mattot1 ;
cond12 = cond11 et cl1 ;
cond1 = cond mod1 mat1 ;
cond2 = cond mod2 mat2 ;
cond3 = cond mod3 mat3 ;
cond4 = cond mod4 mat4 ;
cond5 = cond mod5 mat5 ;
condtot = cond1 et cond2 et cond3 et cond4 et cond5 et cond12 ;
chpo1 = reso condtot flutot ;
titr 'champ de temperatures';
trac chpo1 tout ;
titr 'inox' ;
trac chpo1 surfinox ;
titr 'inox1' ;
trac chpo1 inox1 ;
titr 'inox2' ;
trac chpo1 inox2 ;
titr 'inox3' ;
trac chpo1 inox3 ;
titr 'inox4' ;
trac chpo1 inox4 ;
titr 'inox5' ;
trac chpo1 inox5 ;
titr 'inox6' ;
trac chpo1 inox6 ;
titr 'ceram' ;
trac chpo1 ceram ;
titr 'capa' ;
fin;
trac chpo1 capa ;
titr 'capax' ;
trac chpo1 capax ;
titr 'socle' ;
trac chpo1 socle ;
titr 'support' ;
trac chpo1 support ;
*ooooooooooooooooMECANIQUEooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooo
Mmodout2 = mode tout2 mecanique elastique isotrope ;
Mmoderam = mode ceram mecanique elastique isotrope ;
Mmodtout = Mmodout2 et Mmoderam ;
Mmatout2 = mate Mmodout2 youn 1.25e11 nu 0.31 rho 8700 alph 1.7e-5 ;
Mmateram = mate Mmoderam youn 1.25e9 nu 0.31 rho 3900 alph 8.e-6 ;
Mmattout = Mmatout2 et Mmateram ;
sigt1 = thet Mmattout Mmodtout chpo1 ;
f1 = bsig Mmodtout sigt1 ;
************resolution***********************
rig1 = rigi Mmodtout Mmattout ;
*rigcl1 = rig1 et cl2 ;
Alan TENZA GT promo2003_____________________________________Page 77 sur 79
Association
EURATOM -CEA
rigcl1 = rig1 ;
dep1 = reso rigcl1 (f1) ;
*********post traitement******************
*trace de la deformee
def0 = defo tout dep1 0. blan ;
def1 = defo (surf) dep1 1. rouge ;
def2 = defo (stot) dep1 1. bleu ;
titr'deformation';
trac (def0 et def1 et def2) ;
*contraintes
sigtot1 = sigm dep1 Mmodtout Mmattout ;
sigm1 = sigtot1 - sigt1 ;
*champ contraintes
vm = ( vmis Mmodtout sigm1 )/1.e6 ;
titr' contraintes von mises(maxi='(maxi vm)'MPa)';
trac Mmodtout vm ;
s_zz = (exco SMZZ sigm1)/1.e6 ;
titr'contraintes s_zz (maxi='(maxi s_zz)'MPa)' ;
trac Mmodtout s_zz ;
s_rr = (exco SMRR sigm1)/1.e6 ;
titr'contraintes s_rr (maxi='(maxi s_rr)'MPa)';
trac Mmodtout s_rr ;
*opti donn 5 ;
fin;
Alan TENZA GT promo2003_____________________________________Page 78 sur 79
Vous aimerez peut-être aussi
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- Les Pieux Fores - SetraDocument194 pagesLes Pieux Fores - Setrahakim71187% (15)
- Programme de Technologie Terminale F3Document31 pagesProgramme de Technologie Terminale F3Bill Pitinguele95% (22)
- Techniques de L'ingénieur - Échangeurs de Chaleur - Dimensionnement ThermiqueDocument20 pagesTechniques de L'ingénieur - Échangeurs de Chaleur - Dimensionnement ThermiqueAli FguiriPas encore d'évaluation
- Aménagement Des Carrefours InterurbainsDocument138 pagesAménagement Des Carrefours Interurbainsibnmessaoud10100% (2)
- Simulation D'un Ecoulement TurbulentDocument73 pagesSimulation D'un Ecoulement Turbulentamine_abdalahPas encore d'évaluation
- Pont Dalle Doc Setra 1989Document143 pagesPont Dalle Doc Setra 1989marwagc100% (1)
- TP - Chromatographie Acides AminesDocument1 pageTP - Chromatographie Acides Aminesmerycne100% (6)
- Pont CadreDocument112 pagesPont CadrehariziboualemPas encore d'évaluation
- TD 2 Thermodynamique Corrigé PDFDocument4 pagesTD 2 Thermodynamique Corrigé PDFamiramPas encore d'évaluation
- Chp2 Thermique de L'enveloppe Des Batis 18Document7 pagesChp2 Thermique de L'enveloppe Des Batis 18Chemali RamziPas encore d'évaluation
- TutorielDocument39 pagesTutorielHelmi LandolsiPas encore d'évaluation
- Essentiel - Introduction Thermique Batiment PDFDocument16 pagesEssentiel - Introduction Thermique Batiment PDFJean-guillaume AllemannPas encore d'évaluation
- Cours Enrobés ETS PDFDocument35 pagesCours Enrobés ETS PDFBelheziel Aek100% (1)
- Chapitre 02 - Pathologie Liées Aux SolsDocument7 pagesChapitre 02 - Pathologie Liées Aux Solsbahazagoub7Pas encore d'évaluation
- Etude Et Modelisation Des SupercondensateursDocument237 pagesEtude Et Modelisation Des Supercondensateursyasserdiab75Pas encore d'évaluation
- 0963 EnerBat2007 PDFDocument221 pages0963 EnerBat2007 PDFZakaria AketouanePas encore d'évaluation
- Rapport de TP Durabilité Des MatériauxDocument18 pagesRapport de TP Durabilité Des MatériauxAmine SaidiPas encore d'évaluation
- TD2 Thermo FSSM 2022-2023Document2 pagesTD2 Thermo FSSM 2022-2023عبدالغني السوسيPas encore d'évaluation
- Barare SymboleDocument85 pagesBarare SymboleAhmed SchPas encore d'évaluation
- A Program For Solving Heat and Mass Transfer Problems On A PCDocument198 pagesA Program For Solving Heat and Mass Transfer Problems On A PCsaeidianPas encore d'évaluation
- Pasapas ExemplesDocument32 pagesPasapas Exemplesparodiaz87Pas encore d'évaluation
- Xavier Dechamps TFEDocument107 pagesXavier Dechamps TFEismail douidiPas encore d'évaluation
- 5.2.1-N117 Etude Dangers V2018Document194 pages5.2.1-N117 Etude Dangers V2018belakroumPas encore d'évaluation
- Représentation Du Cycle de L'eau Dans Un Modèle Radiatif Convectif Basé Sur La Maximisation de La Prodution D'entropie.Document29 pagesReprésentation Du Cycle de L'eau Dans Un Modèle Radiatif Convectif Basé Sur La Maximisation de La Prodution D'entropie.SuperChocolatPas encore d'évaluation
- Projet M1 Design Elmi MouminDocument20 pagesProjet M1 Design Elmi MouminAbdirazak ElmiPas encore d'évaluation
- Méthode D'optimisation MaillageDocument130 pagesMéthode D'optimisation MaillagemehdiPas encore d'évaluation
- Application - de - La - Methode - Des - Elements - Finis - Dans - Le - Domaine - IndustrielDocument22 pagesApplication - de - La - Methode - Des - Elements - Finis - Dans - Le - Domaine - IndustrielpkPas encore d'évaluation
- Numerical Methods in ElectromagneticsDocument214 pagesNumerical Methods in ElectromagneticsAdams MüllerPas encore d'évaluation
- Rapport These Luc MoreauDocument223 pagesRapport These Luc MoreauOumaima JORAICHEPas encore d'évaluation
- CPT - 3488 VecDocument56 pagesCPT - 3488 VeclecaudeyPas encore d'évaluation
- IOSIFDocument152 pagesIOSIFDARK PHOENIXPas encore d'évaluation
- ABenechet 2001-007Document32 pagesABenechet 2001-007Fongho Eric SinclairPas encore d'évaluation
- 2006 These Uma492 Pascal - GrobDocument202 pages2006 These Uma492 Pascal - GrobWarda JoryPas encore d'évaluation
- Rapport de Stage BTSDocument29 pagesRapport de Stage BTSDéveloppement EconomiquePas encore d'évaluation
- Modélisation D'un Moteur Complet en Perte D'aube en Dynamique RapideDocument176 pagesModélisation D'un Moteur Complet en Perte D'aube en Dynamique RapideIsrae El AmriPas encore d'évaluation
- Etude de La Conception de Circuits Logiques: - Note CEA-N-1283Document151 pagesEtude de La Conception de Circuits Logiques: - Note CEA-N-1283Gaffar SavadogoPas encore d'évaluation
- Memoire: Asma BarbouchiDocument119 pagesMemoire: Asma Barbouchifad hmaPas encore d'évaluation
- Tel 00010221Document155 pagesTel 00010221Halima MoudnibPas encore d'évaluation
- Givrage Thèse 3Document235 pagesGivrage Thèse 3ecitimo raqinPas encore d'évaluation
- Corr 03Document54 pagesCorr 03merida97Pas encore d'évaluation
- Sdic P3746Document39 pagesSdic P3746kareem hachiPas encore d'évaluation
- TP Carotte Fao Tournage 2 Axes Cat-Process. Carotte. TD Tournage 2 Axes Catia V5 R11-R17Document34 pagesTP Carotte Fao Tournage 2 Axes Cat-Process. Carotte. TD Tournage 2 Axes Catia V5 R11-R17Nizar FerjaouiPas encore d'évaluation
- Edf R&D: Code Saturne DocumentationDocument39 pagesEdf R&D: Code Saturne DocumentationOmar FaroukPas encore d'évaluation
- Commande F Loue Adaptative D Une M AchinDocument115 pagesCommande F Loue Adaptative D Une M AchinBilal MKSPas encore d'évaluation
- Master Khadidja BELHACEMDocument57 pagesMaster Khadidja BELHACEMZahra ZahraPas encore d'évaluation
- These M.boutaayamou 2009Document119 pagesThese M.boutaayamou 2009Warda JoryPas encore d'évaluation
- Null 1Document101 pagesNull 1hadroug nadjiPas encore d'évaluation
- PasapasDocument60 pagesPasapasAnirudh NehraPas encore d'évaluation
- Analyse Experimentale Et Numerique de La FabricationDocument210 pagesAnalyse Experimentale Et Numerique de La FabricationYoussef TrimechPas encore d'évaluation
- Présentation AcwapowerDocument35 pagesPrésentation AcwapowerSoufian EelPas encore d'évaluation
- 978 3 8416 3335 4Document129 pages978 3 8416 3335 47ammaPas encore d'évaluation
- Francisco Sousa Alves 2020 ArchivageDocument165 pagesFrancisco Sousa Alves 2020 Archivagesrinivas PPas encore d'évaluation
- SimulinkDocument87 pagesSimulinktarek menadjliaPas encore d'évaluation
- PolycopieDocument6 pagesPolycopieChebli AbdoPas encore d'évaluation
- Rapport Macqueron ULRDocument107 pagesRapport Macqueron ULRwidadPas encore d'évaluation
- Fascicule - 2 - Mode D'emploi - Exemples PDFDocument67 pagesFascicule - 2 - Mode D'emploi - Exemples PDFhamza3660Pas encore d'évaluation
- BERTRAND 2016 Diffusion - PdfliireDocument243 pagesBERTRAND 2016 Diffusion - PdfliireSAFAE JAAYDARPas encore d'évaluation
- These2008 Illoul PDFDocument126 pagesThese2008 Illoul PDFWeight lossPas encore d'évaluation
- FDMADocument206 pagesFDMAGuiri Abd ElhàkPas encore d'évaluation
- Physique NucléaireDocument149 pagesPhysique Nucléairemeryem.capegeminiPas encore d'évaluation
- Manuel JoveDocument219 pagesManuel Joveseifallah2100% (1)
- These - Muxika - Olasagasti - 2 Tre Imporatnt 22Document159 pagesThese - Muxika - Olasagasti - 2 Tre Imporatnt 22houssem yahyaouiPas encore d'évaluation
- collectthiesindexassocHASH018381f5303e Dirpfe GM 0139 PDFDocument114 pagescollectthiesindexassocHASH018381f5303e Dirpfe GM 0139 PDFhafsa HaddouPas encore d'évaluation
- Rapport de Stage Ing Enieur Mod Elisation M Et Eorologique Pour L' EolienDocument77 pagesRapport de Stage Ing Enieur Mod Elisation M Et Eorologique Pour L' Eolienmustapha baaddiPas encore d'évaluation
- CCTPEDocument334 pagesCCTPEgPas encore d'évaluation
- Rapport de ThA Se FinalDocument222 pagesRapport de ThA Se Finalwafa wafaPas encore d'évaluation
- Codes N Umm Jenny 1819Document27 pagesCodes N Umm Jenny 1819Inass ELHAOUARIPas encore d'évaluation
- Combri 1Document29 pagesCombri 1Sebastien Cabot100% (1)
- LJB KKDocument181 pagesLJB KKEgillPas encore d'évaluation
- Investigation de L'iode Comme Propergol Pour La Propulsion Ionique ' A GrillesDocument157 pagesInvestigation de L'iode Comme Propergol Pour La Propulsion Ionique ' A GrillesTOP 10Pas encore d'évaluation
- Rapport de Stage IngénieurDocument66 pagesRapport de Stage IngénieurMohmo DIARRAPas encore d'évaluation
- Poly Physique ComposantsDocument199 pagesPoly Physique Composantstoufik bendibPas encore d'évaluation
- Note de Calcul Charpente Metallique 1Document66 pagesNote de Calcul Charpente Metallique 1Brahim Mouhcine100% (2)
- MERCIER 2013 ArchivageDocument286 pagesMERCIER 2013 Archivagebahazagoub7Pas encore d'évaluation
- Premur Atetcpt SSTDCDocument126 pagesPremur Atetcpt SSTDCbahazagoub7Pas encore d'évaluation
- Coupe Nommé-A 4 PAYDocument1 pageCoupe Nommé-A 4 PAYbahazagoub7Pas encore d'évaluation
- Bordereau Des Aciers PDFDocument1 pageBordereau Des Aciers PDFbahazagoub7Pas encore d'évaluation
- CR Er Un Placard PortesDocument4 pagesCR Er Un Placard Portesbahazagoub7Pas encore d'évaluation
- Transfert ThermiqueDocument161 pagesTransfert ThermiqueMehdi Hababa100% (1)
- BC22Document0 pageBC22Khaled LobanzPas encore d'évaluation
- Ad070522 PDFDocument77 pagesAd070522 PDFbahazagoub7Pas encore d'évaluation
- Art18-4 7Document16 pagesArt18-4 7bahazagoub7Pas encore d'évaluation
- BE 1.2 Règles D - Exécution Des Travaux de Terrassement Pour Le Bâtiment PDFDocument29 pagesBE 1.2 Règles D - Exécution Des Travaux de Terrassement Pour Le Bâtiment PDFbahazagoub7Pas encore d'évaluation
- Nom de Collecteur #Regard Distance Partielle (M) Cot TNDocument5 pagesNom de Collecteur #Regard Distance Partielle (M) Cot TNbahazagoub7Pas encore d'évaluation
- L'Électricité Pour L'Installateur SanitaireDocument66 pagesL'Électricité Pour L'Installateur Sanitairebahazagoub7Pas encore d'évaluation
- Guide Rage Planchers Poutrelles Entrevous Neuf 2014 12 - 0 PDFDocument184 pagesGuide Rage Planchers Poutrelles Entrevous Neuf 2014 12 - 0 PDFFulvio Gil100% (1)
- Exposé PathologieDocument24 pagesExposé Pathologiebahazagoub7Pas encore d'évaluation
- Département Génie CivilDocument22 pagesDépartement Génie CivilHama SlimPas encore d'évaluation
- 001 Rapport Final PFEDocument125 pages001 Rapport Final PFEMed Amine Rifi100% (1)
- Rapport de Stage de Fin D'Etude: Alan TENZA GT Promo2003Document79 pagesRapport de Stage de Fin D'Etude: Alan TENZA GT Promo2003bahazagoub7Pas encore d'évaluation
- Transfert Chaleur PDFDocument8 pagesTransfert Chaleur PDFbahazagoub7Pas encore d'évaluation
- Stage Technicien FinalDocument21 pagesStage Technicien FinalSadok92Pas encore d'évaluation
- Rapport de Stage de Fin D'Etude: Alan TENZA GT Promo2003Document79 pagesRapport de Stage de Fin D'Etude: Alan TENZA GT Promo2003bahazagoub7Pas encore d'évaluation
- DT354Document238 pagesDT354koffi kouakou crepinPas encore d'évaluation
- Devoir de Synthese 2 2019 2020 22Document5 pagesDevoir de Synthese 2 2019 2020 22chihebPas encore d'évaluation
- Schemat Mercury Optimax 175Document12 pagesSchemat Mercury Optimax 175Wiesiek RabczukPas encore d'évaluation
- TP 03 Dosage Des Sucres Réductuers Par DNSDocument2 pagesTP 03 Dosage Des Sucres Réductuers Par DNSAhmed SaciPas encore d'évaluation
- Chapitre 3 La Membrane Plasmique MedDocument6 pagesChapitre 3 La Membrane Plasmique MedDear tynaPas encore d'évaluation
- CH9 - Force Des Acides Et Des Bases - ElevDocument4 pagesCH9 - Force Des Acides Et Des Bases - ElevmarinPas encore d'évaluation
- Nussbaum Montagehelfer KunststoffDocument336 pagesNussbaum Montagehelfer KunststoffSimon BrändlePas encore d'évaluation
- SANA2Document15 pagesSANA2saxhornPas encore d'évaluation
- Traitement Dechets Industriels Classe1Document29 pagesTraitement Dechets Industriels Classe1Abdellah NaciriPas encore d'évaluation
- UntitledDocument2 pagesUntitledEva Ramilo NogueiraPas encore d'évaluation
- Correction Exercice Loi ArrhenuisDocument5 pagesCorrection Exercice Loi Arrhenuisimane bendaPas encore d'évaluation
- Capteur - Capteur de Température - WikiversitéDocument24 pagesCapteur - Capteur de Température - WikiversitéYussuf AdeniyiPas encore d'évaluation
- Exercice NDocument5 pagesExercice Nkolabot100% (3)
- TD19 CorrectionDocument5 pagesTD19 Correctionmm72c48gbgPas encore d'évaluation
- O.U TP1Document2 pagesO.U TP1Adel Adaika85% (13)
- PfeDocument36 pagesPfeahmed fahemPas encore d'évaluation
- Bloc D'angle R+6Document31 pagesBloc D'angle R+6farid RezigPas encore d'évaluation
- Buergler 5781958 TD PDFDocument65 pagesBuergler 5781958 TD PDFHafsa Ikram BadaouiPas encore d'évaluation
- Chapitre IV Formes Liquides 2020Document5 pagesChapitre IV Formes Liquides 2020NAILA HADJIPas encore d'évaluation
- MSDS ACT 500 0113 FR ACTI FLOC Rev1Document11 pagesMSDS ACT 500 0113 FR ACTI FLOC Rev1Hector-le-troyenPas encore d'évaluation
- Les AciersDocument2 pagesLes AciersZaarad ZakariaPas encore d'évaluation
- UranuimDocument40 pagesUranuimOussama DhahriPas encore d'évaluation
- Equations de MaxwellDocument2 pagesEquations de MaxwellWalid StambouliPas encore d'évaluation
- Book Allura DecibelDocument6 pagesBook Allura DecibelEman EmyPas encore d'évaluation
- Microalbumin Microalbumin: Domaine D'ApplicationDocument6 pagesMicroalbumin Microalbumin: Domaine D'ApplicationFouad RahiouyPas encore d'évaluation
- CXS 175fDocument4 pagesCXS 175fDominique RosaliePas encore d'évaluation