Vous aimerez peut-être aussi
- 1.vibrations Des PoutresDocument107 pages1.vibrations Des Poutrestouffaha moussaPas encore d'évaluation
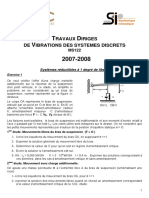
- TD de Vibrations Des Systemes Discrets Solution PDFDocument33 pagesTD de Vibrations Des Systemes Discrets Solution PDFabdouelPas encore d'évaluation
- Exmecanique 2008-2009 4 PDFDocument12 pagesExmecanique 2008-2009 4 PDFIl NBPas encore d'évaluation
- PumpingDocument10 pagesPumpingAngelPas encore d'évaluation
- Travaux Dirigés de Mécanique N°4: Exercice 1: Mesure D'un Coefficient de ViscositéDocument3 pagesTravaux Dirigés de Mécanique N°4: Exercice 1: Mesure D'un Coefficient de ViscositéMedjahed MhåmędPas encore d'évaluation
- C4 TD Oscillations Mecaniques 1Document3 pagesC4 TD Oscillations Mecaniques 1moryammossati92Pas encore d'évaluation
- CnamC42 2008 PDFDocument12 pagesCnamC42 2008 PDFChakir LaiminaPas encore d'évaluation
- L05 PHR004 2010 PDFDocument22 pagesL05 PHR004 2010 PDFMarwane OuadadPas encore d'évaluation
- Série D'exercices N°1 - Sciences Physiques LES OSCILLATIONS LIBRES MECANIQUES - Bac Sciences Exp (2012-2013) MR ALIBI ANOUARDocument6 pagesSérie D'exercices N°1 - Sciences Physiques LES OSCILLATIONS LIBRES MECANIQUES - Bac Sciences Exp (2012-2013) MR ALIBI ANOUARKais GuesmiPas encore d'évaluation
- Exemples Patrick PaultreDocument41 pagesExemples Patrick Paultremostefaoui mohammed100% (1)
- Chapitre 2 Réponse ÉlastiqueDocument28 pagesChapitre 2 Réponse ÉlastiqueSaid MtacyprPas encore d'évaluation
- Chap02. Réponse Elastique Des Structures Aux SéismesDocument27 pagesChap02. Réponse Elastique Des Structures Aux Séismesahmadomar89Pas encore d'évaluation
- Chapitre02.réponses Élastiques Des Structures PDFDocument26 pagesChapitre02.réponses Élastiques Des Structures PDFMohamed HaykelPas encore d'évaluation
- Serie2 - Dynamique Des Structures 2019 PDFDocument2 pagesSerie2 - Dynamique Des Structures 2019 PDFMohamed ZakritiPas encore d'évaluation
- Ondes Et Vibrations: IUT, Année 2008-09Document16 pagesOndes Et Vibrations: IUT, Année 2008-09Armand StevenskiPas encore d'évaluation
- Oscillations Mécaniques Libres PDFDocument6 pagesOscillations Mécaniques Libres PDFAzizElheniPas encore d'évaluation
- Série D'exercices N°8 - Sciences Physiques Les Oscillations Mécaniques Libres - Bac Technique (2010-2011) MR ALIBI ANOUARDocument6 pagesSérie D'exercices N°8 - Sciences Physiques Les Oscillations Mécaniques Libres - Bac Technique (2010-2011) MR ALIBI ANOUARKais GuesmiPas encore d'évaluation
- TD de Vibrations Des Systemes Discrets + SolutionDocument33 pagesTD de Vibrations Des Systemes Discrets + SolutionAfif Al Baalbaki50% (6)
- TD Solide BCPST2Document9 pagesTD Solide BCPST2ouedraogodri2016Pas encore d'évaluation
- ExamenDocument2 pagesExamenGermain YvesPas encore d'évaluation
- DS5 Physique PcsiDocument7 pagesDS5 Physique Pcsijean.prcp81Pas encore d'évaluation
- Devoir de Synthese N°2: Ecole Sadiki TunisDocument4 pagesDevoir de Synthese N°2: Ecole Sadiki TunistorkitaherPas encore d'évaluation
- td2 VibraDocument5 pagestd2 VibraAilton muhanchePas encore d'évaluation
- Orca Share Media1666461557200 6989646375224304223Document12 pagesOrca Share Media1666461557200 6989646375224304223khezzane nadjouaPas encore d'évaluation
- DM06 - 2023 Oscillateur Amorti Pour Le 15 NovembreDocument3 pagesDM06 - 2023 Oscillateur Amorti Pour Le 15 Novembrebernix12345Pas encore d'évaluation
- Exercices 4 Oscillateurs MécaniquesDocument1 pageExercices 4 Oscillateurs Mécaniquesmimon bikon100% (1)
- Chap2 Sys A 1ddlDocument17 pagesChap2 Sys A 1ddlTi MaPas encore d'évaluation
- TD Dynamique Terrestre Mpsi 1Document3 pagesTD Dynamique Terrestre Mpsi 1aminealskjz100% (1)
- TD MecaniqueDocument13 pagesTD MecaniqueSovann_Long80% (5)
- TD Oscillateurs Mecaniques Libres 2016Document7 pagesTD Oscillateurs Mecaniques Libres 2016Oumar TraoréPas encore d'évaluation
- TD AutoDocument26 pagesTD Autoanass sbniPas encore d'évaluation
- Exmecanique 2008-2009 4 PDFDocument12 pagesExmecanique 2008-2009 4 PDFAliOucharPas encore d'évaluation
- Serie Oscillations Mécaniques LibresDocument6 pagesSerie Oscillations Mécaniques Libreskhlifisamir19Pas encore d'évaluation
- TleD - PHY - L5 - Oscillations Mécaniques LibresDocument8 pagesTleD - PHY - L5 - Oscillations Mécaniques LibresYssah SerifouPas encore d'évaluation
- Série D'exercices - Physique Oscillations Mécaniques Libres - Bac Sciences Exp (2014-2015) MR Handoura NaceurDocument4 pagesSérie D'exercices - Physique Oscillations Mécaniques Libres - Bac Sciences Exp (2014-2015) MR Handoura Naceura6857971Pas encore d'évaluation
- Osc FoDocument6 pagesOsc FoJay SlvatrPas encore d'évaluation
- Série D'exercices - Physique Oscillateurs Mecaniques Libres Amortis Et Non Amortis - Bac Sciences Exp (2011-2012) MR TRAYIA NABIL PDFDocument5 pagesSérie D'exercices - Physique Oscillateurs Mecaniques Libres Amortis Et Non Amortis - Bac Sciences Exp (2011-2012) MR TRAYIA NABIL PDFAzizElheni100% (3)
- Série D'exercices N°9 - Sciences Physiques Les Oscillations Forcées Mécaniques - Bac Sciences Exp (2011-2012) MR ALIBI ANOUARDocument7 pagesSérie D'exercices N°9 - Sciences Physiques Les Oscillations Forcées Mécaniques - Bac Sciences Exp (2011-2012) MR ALIBI ANOUARKais GuesmiPas encore d'évaluation
- TD Systemes Discrets CADYDocument8 pagesTD Systemes Discrets CADYHassan TankoPas encore d'évaluation
- TD P11 Oscillations Mécanique 2024 OkDocument2 pagesTD P11 Oscillations Mécanique 2024 OkNgouille lecorPas encore d'évaluation
- TD-Oscillations Mécanique 2024-lsll - WahabdiopDocument2 pagesTD-Oscillations Mécanique 2024-lsll - WahabdiopAmadou Oury Diallo100% (1)
- Nom Amortie Serie 5 TakiDocument6 pagesNom Amortie Serie 5 TakiSalsabil SgatniPas encore d'évaluation
- Chapitre 1Document67 pagesChapitre 1Chaimae BoualiPas encore d'évaluation
- Bac Physique Oscillations MecaniquesDocument21 pagesBac Physique Oscillations MecaniquesJean LeonardoPas encore d'évaluation
- Gratte-Ciels Et Tours: A 2007 Phys. Ii MPDocument6 pagesGratte-Ciels Et Tours: A 2007 Phys. Ii MPMihnea GamanPas encore d'évaluation
- Recc81vision nc2b07Document5 pagesRecc81vision nc2b07dragokalPas encore d'évaluation
- TD-oscillations Mecaniques 2022 lsll-WahabDiopDocument2 pagesTD-oscillations Mecaniques 2022 lsll-WahabDiopHamadi DialloPas encore d'évaluation
- English Grammar in Use - Fifth Edition (Raymond Murphy)Document10 pagesEnglish Grammar in Use - Fifth Edition (Raymond Murphy)Pkpk StafPas encore d'évaluation
- WWW Algerfac Com 9 Exercices en OscillatDocument5 pagesWWW Algerfac Com 9 Exercices en Oscillatdadjaadjei01Pas encore d'évaluation
- Exercice Mecanique ForcéDocument11 pagesExercice Mecanique ForcéAmine CheikhrouhouPas encore d'évaluation
- Page FacebookDocument3 pagesPage FacebookDjm AlgPas encore d'évaluation
- Physique 2020Document14 pagesPhysique 2020Je SyisPas encore d'évaluation
- 1cm3k3g8f 386237Document2 pages1cm3k3g8f 386237Abdoulaye BaPas encore d'évaluation
- RoueFreinage RoueTapisRoulant TimochenkoDocument21 pagesRoueFreinage RoueTapisRoulant TimochenkoمنةيصةبصسكبةPas encore d'évaluation
- Équations différentielles: Les Grands Articles d'UniversalisD'EverandÉquations différentielles: Les Grands Articles d'UniversalisPas encore d'évaluation
- TATSAMBON - Rapport Méthodes ÉnergétiquesDocument15 pagesTATSAMBON - Rapport Méthodes Énergétiqueslando de chancePas encore d'évaluation
- Aspirateur À Copeaux de Bois Leman ASP152 - 150 Litres en StockDocument1 pageAspirateur À Copeaux de Bois Leman ASP152 - 150 Litres en StockAli KhadraouiPas encore d'évaluation
- QCMDocument74 pagesQCMNawel Lhk100% (2)
- Manual Servicio Nx125transcityDocument148 pagesManual Servicio Nx125transcityIvan EliPas encore d'évaluation
- Extraits TroislumieresDocument15 pagesExtraits TroislumieresBruno GervalPas encore d'évaluation
- HTTP://WWW - France Examen - Com/annales Bac Terminale Generale Scientifiq...Document3 pagesHTTP://WWW - France Examen - Com/annales Bac Terminale Generale Scientifiq...la physique selon le programme FrançaisPas encore d'évaluation
- Lexique Des Acronymes SNCFDocument627 pagesLexique Des Acronymes SNCFlasse konePas encore d'évaluation
- Aventures en Terre Du Milieu 5e Cultures Naines FRDocument15 pagesAventures en Terre Du Milieu 5e Cultures Naines FREmmanuel PicardatPas encore d'évaluation
- Voici Les Plus Grands Mensonges Sur Le Changement Climatique Et Le Réchauffement de La Planète - Wikistrike PDFDocument10 pagesVoici Les Plus Grands Mensonges Sur Le Changement Climatique Et Le Réchauffement de La Planète - Wikistrike PDFD.b. MotarcsPas encore d'évaluation
- Exercices Supplementaires Masses Volumiques Et DensiteDocument2 pagesExercices Supplementaires Masses Volumiques Et Densiteمحمدلمين سيداحمدPas encore d'évaluation
- Exdnb - QCM MathsDocument18 pagesExdnb - QCM MathsJoséphine BesnardPas encore d'évaluation
- Les CanauxDocument3 pagesLes CanauxStéphanie Dolheguy100% (1)
- Liste Laboratoires BTP QCL 25072022Document6 pagesListe Laboratoires BTP QCL 25072022rroma_1983Pas encore d'évaluation
- Agencement Des Espaces PrivesDocument99 pagesAgencement Des Espaces PrivesPremières PerspectivesPas encore d'évaluation
- Massifs de ButeeDocument2 pagesMassifs de Buteelimmoud2jPas encore d'évaluation
- Walter Benjamin Theses Sur Le Concept D'histoireDocument20 pagesWalter Benjamin Theses Sur Le Concept D'histoireThiago FerreiraPas encore d'évaluation
- Corrigé - Réactions Chimiques + Acide:BaseDocument12 pagesCorrigé - Réactions Chimiques + Acide:BaseThierryPas encore d'évaluation
- TP TransfertDocument2 pagesTP TransfertAbdelwahab.gfPas encore d'évaluation
- Product Sheet Me F FR WebDocument16 pagesProduct Sheet Me F FR WebzanazePas encore d'évaluation
- Super Bollo HSE SO - Modele de RemplissageDocument5 pagesSuper Bollo HSE SO - Modele de RemplissageDieu Donne KpelePas encore d'évaluation
- TD 3 2023Document2 pagesTD 3 2023Jamel Ben AmmarPas encore d'évaluation
- Ce Qu'Il Faut D'air Pour Voler by Sandrine Roudeix (Roudeix, Sandrine)Document150 pagesCe Qu'Il Faut D'air Pour Voler by Sandrine Roudeix (Roudeix, Sandrine)Isabelle BKAPas encore d'évaluation
- Fiches - Master Immunologie 2ème SemestreDocument26 pagesFiches - Master Immunologie 2ème Semestredric8884Pas encore d'évaluation
- MODELISATION DES BIOPROCEDES - Cours - 11 - 2018 - 19Document9 pagesMODELISATION DES BIOPROCEDES - Cours - 11 - 2018 - 19Maissa BoucifPas encore d'évaluation
- Le Tenseur Des Contraintes de CauchyDocument59 pagesLe Tenseur Des Contraintes de CauchyKhireddine MimouniPas encore d'évaluation
- Richard MeierDocument31 pagesRichard MeierAymen Areslen100% (1)
- Prévalence Du Staphylococcus Aureus Isolé À Partir de La Viande de Poulet Commercialisée Au Niveau de Rabat, MarocDocument6 pagesPrévalence Du Staphylococcus Aureus Isolé À Partir de La Viande de Poulet Commercialisée Au Niveau de Rabat, MarocSalma BelabbasPas encore d'évaluation
- Cours Aérodrome 2Document4 pagesCours Aérodrome 2RHB GHASSAN100% (1)
- Nietzsche - Les Lumières Et La Cruauté. de L'interprétation de Nietzsche Par La Théorie CritiqueDocument11 pagesNietzsche - Les Lumières Et La Cruauté. de L'interprétation de Nietzsche Par La Théorie CritiqueSofiene ArfeouiPas encore d'évaluation
- Pharmacologie Des Anti UlcéreuxDocument5 pagesPharmacologie Des Anti UlcéreuxNada KarachiPas encore d'évaluation