Vous aimerez peut-être aussi
- Procedé Execution DALOT PDFDocument9 pagesProcedé Execution DALOT PDFAnonymous upDV1P6S092% (13)
- Annexe Éducative - Fondations Profondes - Techniques de Lingénieur-1Document49 pagesAnnexe Éducative - Fondations Profondes - Techniques de Lingénieur-1nanfack100% (1)
- Rapport de StageDocument6 pagesRapport de Stageljr21Pas encore d'évaluation
- Charpent MetaliqueDocument41 pagesCharpent MetaliqueTimo Shmitt100% (1)
- Cours TreillisDocument37 pagesCours TreillisRealmak AwaPas encore d'évaluation
- CAHPITRE 1.les Contraintes Dans Le SolDocument8 pagesCAHPITRE 1.les Contraintes Dans Le SolSíhëm SíhęmPas encore d'évaluation
- Symboles EC2Document21 pagesSymboles EC2Mohamed Taher JebariPas encore d'évaluation
- Srie 2 PDFDocument4 pagesSrie 2 PDFaliabdalghafourPas encore d'évaluation
- Rattrapage Geotechnique II 2017 2018Document2 pagesRattrapage Geotechnique II 2017 2018somaya ehPas encore d'évaluation
- Essai Oeudométrique JaafarDocument12 pagesEssai Oeudométrique JaafarHîc HémPas encore d'évaluation
- Ds Topographie 1GC Iset Nabeul 2013Document2 pagesDs Topographie 1GC Iset Nabeul 2013Soulaima SeddikiPas encore d'évaluation
- But de L'essaiDocument6 pagesBut de L'essaiManal Tahri0% (1)
- L'enrobageDocument21 pagesL'enrobageAzmi AnassPas encore d'évaluation
- TPE Barrage Voûte Et CrueDocument17 pagesTPE Barrage Voûte Et CruevictorPas encore d'évaluation
- Compte Rendu PlaxisDocument17 pagesCompte Rendu PlaxisKhaoula MessaoudiPas encore d'évaluation
- Cours RDM Chapitre IIDocument8 pagesCours RDM Chapitre IINaito Oroshi0% (1)
- Cours8coefficients Dinfluence de FlexibilitéDocument5 pagesCours8coefficients Dinfluence de FlexibilitéMoulay Zoubir100% (1)
- TD5 RDM2Document3 pagesTD5 RDM2MilanoPas encore d'évaluation
- Cheloufi SaraDocument153 pagesCheloufi SaraMahmoud HawelPas encore d'évaluation
- ENTP Cours RDM Niveau Universitaire Partie 2 PDFDocument55 pagesENTP Cours RDM Niveau Universitaire Partie 2 PDFSimplice Djouassi TiamPas encore d'évaluation
- Examen Béton ArméDocument10 pagesExamen Béton ArméboscoPas encore d'évaluation
- Poly TD Structures L3GCDocument30 pagesPoly TD Structures L3GCWald BahPas encore d'évaluation
- (Etude D'un Batiment A Usage D'habitation en Beton Arme (R+1) ) Part 1Document26 pages(Etude D'un Batiment A Usage D'habitation en Beton Arme (R+1) ) Part 1Abrar NOuARPas encore d'évaluation
- TP CDS (Portique)Document5 pagesTP CDS (Portique)lando de chancePas encore d'évaluation
- Memoire Sur PDFDocument144 pagesMemoire Sur PDFDidier NcharePas encore d'évaluation
- Le Nivellement DirectDocument5 pagesLe Nivellement DirectAbdellatif Khafif100% (1)
- Cahier TP GEO 2 NDocument13 pagesCahier TP GEO 2 NRania Ben HassinePas encore d'évaluation
- Modélisation Tunnel Sur Plaxis 2DDocument45 pagesModélisation Tunnel Sur Plaxis 2DLaakad OmarPas encore d'évaluation
- 2 Hydraulique Des Sols PDFDocument12 pages2 Hydraulique Des Sols PDFadsinnatePas encore d'évaluation
- L3-GC-calcul Assiste Par ordinateur-TP4 (1-2) - 1Document1 pageL3-GC-calcul Assiste Par ordinateur-TP4 (1-2) - 1Tarike ZohirPas encore d'évaluation
- Ds 2Document20 pagesDs 2Ayoub HoussainePas encore d'évaluation
- Mon RapportDocument42 pagesMon RapportTerence Peteyr BaelishPas encore d'évaluation
- Notes1 Ouvrages SpeciauxDocument18 pagesNotes1 Ouvrages Speciauxfadi eidPas encore d'évaluation
- RankineDocument11 pagesRankineFias AnuobPas encore d'évaluation
- Conception Des Fondations Profondes 1 ExercicesDocument4 pagesConception Des Fondations Profondes 1 ExercicesAndrea PournyPas encore d'évaluation
- Leau Dans Le SolDocument10 pagesLeau Dans Le SolBelal FaridPas encore d'évaluation
- Rappel Méthode de Coupures Exercices CorrigésDocument6 pagesRappel Méthode de Coupures Exercices CorrigésAbdellah DaoudiPas encore d'évaluation
- Element de RheologieDocument20 pagesElement de RheologiephanPas encore d'évaluation
- Analyse Limite 2021Document40 pagesAnalyse Limite 2021Fisso Ben BenPas encore d'évaluation
- Etude de L'ossature D'un Immeuble D'habitation (Sous Sol +Rdc+5 Etages)Document129 pagesEtude de L'ossature D'un Immeuble D'habitation (Sous Sol +Rdc+5 Etages)Hamza MamiPas encore d'évaluation
- Chapitre 6Document33 pagesChapitre 6Amin Jamoussi100% (1)
- TD3 Etude D'une Poutre-EleveDocument15 pagesTD3 Etude D'une Poutre-EleveMuscadin MakensonPas encore d'évaluation
- TP 2 FlexionDocument9 pagesTP 2 FlexionBouallegue MounirPas encore d'évaluation
- TD EeeDocument1 pageTD EeeAmin JamoussiPas encore d'évaluation
- CHAP3 CM2 SUPTP (Version2)Document50 pagesCHAP3 CM2 SUPTP (Version2)Elhadji Mayacine NguiranePas encore d'évaluation
- TD 4Document2 pagesTD 4Thamer SaiihiPas encore d'évaluation
- Les Tassements Régles GénéralesDocument78 pagesLes Tassements Régles Généraleshafsa mejPas encore d'évaluation
- TD Murs de Soutc3a8nementDocument5 pagesTD Murs de Soutc3a8nementaliabdalghafourPas encore d'évaluation
- Rapport de Stage CGI JSM2Document69 pagesRapport de Stage CGI JSM2Salma AdlPas encore d'évaluation
- Chapitre 08 Poutre ContinuDocument9 pagesChapitre 08 Poutre ContinuRania Ben HassinePas encore d'évaluation
- 002-Dimensionnement Des StructuresDocument87 pages002-Dimensionnement Des StructuresJesús Segura LunaPas encore d'évaluation
- Mini Projet Béton PrécontraintDocument6 pagesMini Projet Béton PrécontraintSimo NoussairPas encore d'évaluation
- Chap013 Caquot Forfaitaire - WatermarkDocument20 pagesChap013 Caquot Forfaitaire - WatermarknanfackPas encore d'évaluation
- Introduction GénéraleDocument53 pagesIntroduction GénéraleImen NinaPas encore d'évaluation
- Cours de Construction MétalliqueDocument21 pagesCours de Construction MétalliqueCastiglianoPas encore d'évaluation
- Calcul Dyn Part 2Document24 pagesCalcul Dyn Part 2mbarekPas encore d'évaluation
- plafonnageNBi2FR07 Hdefforweb30002Document33 pagesplafonnageNBi2FR07 Hdefforweb30002Ilhame HarPas encore d'évaluation
- DL de CM FINALEDocument36 pagesDL de CM FINALEYahya FdPas encore d'évaluation
- Généralité Sur Les BarragesDocument12 pagesGénéralité Sur Les BarragesMadelbrot AzarPas encore d'évaluation
- Des risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscamingueD'EverandDes risques, des mines et des hommes: La perception du risque chez les mineurs de fond de l'Abitibi-TémiscaminguePas encore d'évaluation
- L' Ingénieur et le développement durableD'EverandL' Ingénieur et le développement durableÉvaluation : 2 sur 5 étoiles2/5 (1)
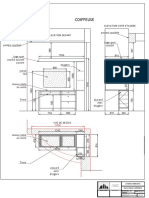
- Coiffeuse Et Placards D'angle PDFDocument2 pagesCoiffeuse Et Placards D'angle PDFljr21Pas encore d'évaluation
- Aciers Mottard 12 1Document1 pageAciers Mottard 12 1ljr21Pas encore d'évaluation
- Francais - Exercice D'articulationDocument12 pagesFrancais - Exercice D'articulationljr21Pas encore d'évaluation
- Decret 2007-009 Du 9 Janvier 2007 CDI Et PreavisDocument1 pageDecret 2007-009 Du 9 Janvier 2007 CDI Et Preavisljr21Pas encore d'évaluation
- Isolation Mur Laine Minerale Semi Rigide GR32 RouleDocument2 pagesIsolation Mur Laine Minerale Semi Rigide GR32 Rouleljr21Pas encore d'évaluation
- 81-Ipea IpeDocument4 pages81-Ipea Ipeljr21Pas encore d'évaluation
- Decret 2007-009 Du 9 Janvier 2007 CDI Et PreavisDocument5 pagesDecret 2007-009 Du 9 Janvier 2007 CDI Et Preavisljr21Pas encore d'évaluation
- Ald Hors Liste - Pnds Sur La Dysplasie Fibreuse Des OsDocument81 pagesAld Hors Liste - Pnds Sur La Dysplasie Fibreuse Des Osljr21Pas encore d'évaluation
- Calcul DallageDocument20 pagesCalcul Dallagebebe13004Pas encore d'évaluation
- Alucobond Et MR Collé PDFDocument52 pagesAlucobond Et MR Collé PDFljr21Pas encore d'évaluation
- Chapitre - 3 - Calcule - Des - Éléments - Secondaires (Réparé)Document34 pagesChapitre - 3 - Calcule - Des - Éléments - Secondaires (Réparé)rayamPas encore d'évaluation
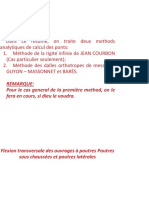
- Méthodes de J.COURBON Et GUYON-MASSONNETDocument26 pagesMéthodes de J.COURBON Et GUYON-MASSONNETSiaquil Vucane Sitoe100% (1)
- Exportlayers Ifc IAIDocument5 pagesExportlayers Ifc IAIwaelPas encore d'évaluation
- Annex Finale S10Document82 pagesAnnex Finale S10Ala zouariPas encore d'évaluation
- Exercice Recap (Ep)Document10 pagesExercice Recap (Ep)Souhail RAOUIPas encore d'évaluation
- TECHNO-CONS CHAP 3 Et Chap 4Document28 pagesTECHNO-CONS CHAP 3 Et Chap 4IssifouHamdaneAdamPas encore d'évaluation
- Guide Simplifié de Géotechnique Eurocode 7 Fondations SuperficiellesDocument57 pagesGuide Simplifié de Géotechnique Eurocode 7 Fondations SuperficiellesFALL0% (1)
- Eff Tsgo 2022 V2-EnoncéDocument8 pagesEff Tsgo 2022 V2-EnoncéSoukaina El-Sadiq100% (4)
- Thèse Doctorat Sdiri AhlemDocument162 pagesThèse Doctorat Sdiri AhlemAhlemSdiriPas encore d'évaluation
- Classification Des Sections Transversales CMDocument8 pagesClassification Des Sections Transversales CMfaresPas encore d'évaluation
- Fiche 4 - Fondation 2020Document8 pagesFiche 4 - Fondation 2020tewngom-1Pas encore d'évaluation
- Etude Statique Et DynamiqueDocument4 pagesEtude Statique Et DynamiqueAhmed EnnehriPas encore d'évaluation
- 3 2 PoaDocument134 pages3 2 PoaMed Mahmoud ABDEL WEDOUDPas encore d'évaluation
- Notes de Calcul1 Des Regards de VisiteDocument14 pagesNotes de Calcul1 Des Regards de VisiteFatima-ezzahra El Kherfih100% (2)
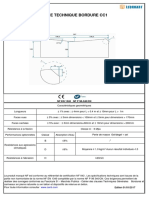
- Fiche Technique Bordures Monobeton Caniveaux Double Pente CC1 CC2Document2 pagesFiche Technique Bordures Monobeton Caniveaux Double Pente CC1 CC2Benhmaida HananPas encore d'évaluation
- Calcul de LhourdisDocument7 pagesCalcul de Lhourdisanon_37710656Pas encore d'évaluation
- FreyssisolDocument8 pagesFreyssisolBOUZIANE MessaoudPas encore d'évaluation
- Essai PoutreDocument7 pagesEssai PoutrekatiaPas encore d'évaluation
- Résumé Bael 2015Document40 pagesRésumé Bael 2015mallymma50% (2)
- DT-VISION ZERO MODULAIRE CONSTRUCTION DE TROIS LOCAUX PREPOSES A LA LAVERIE MEADocument71 pagesDT-VISION ZERO MODULAIRE CONSTRUCTION DE TROIS LOCAUX PREPOSES A LA LAVERIE MEAaymenmoukhlissi02Pas encore d'évaluation
- 8757 E4 U41 Bts Crci 2017 CorrectionDocument11 pages8757 E4 U41 Bts Crci 2017 Correctionabdoul-nasser mounkaïlaPas encore d'évaluation
- Poudre de Marbre 3Document125 pagesPoudre de Marbre 3غيث الإماراتPas encore d'évaluation
- Répartition Charge Sur Écran Suivant Méthode de KreyDocument2 pagesRépartition Charge Sur Écran Suivant Méthode de KreyBec RoudaynaPas encore d'évaluation
- 1-34 Chapitre II - Dommages Et Désordres StructurelsDocument34 pages1-34 Chapitre II - Dommages Et Désordres StructurelsMaroua NaouiPas encore d'évaluation
- 804 InternationalDocument57 pages804 InternationalSarrauste JulienPas encore d'évaluation
- 6 - Composition - Des - Betons - CourantsDocument24 pages6 - Composition - Des - Betons - CourantsDjizoPas encore d'évaluation
- Speech HoDocument6 pagesSpeech HoOloufadé hafizPas encore d'évaluation