Vous aimerez peut-être aussi
- Chapitre IDocument27 pagesChapitre IHulda LekossiPas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- 4 Annee Genie Mecanique Cours de MecaniqDocument26 pages4 Annee Genie Mecanique Cours de MecaniqSAIB BRAHIMPas encore d'évaluation
- TD: Calcul Non Linéaire Des Structures, Ing2 GCDocument7 pagesTD: Calcul Non Linéaire Des Structures, Ing2 GCMohamed Thiam HD100% (1)
- Chapitre 3-Critères de Rupture en PlasticitéDocument9 pagesChapitre 3-Critères de Rupture en PlasticitéTouati BelghaliPas encore d'évaluation
- RDM Chapitre 3 Traction Et Compression Dans Les Barres PDFDocument8 pagesRDM Chapitre 3 Traction Et Compression Dans Les Barres PDFEdmond SawadogoPas encore d'évaluation
- Lois de Comportement2Document8 pagesLois de Comportement2Mounia Chemsseddine100% (1)
- Examen de Structures en PlasticitéDocument5 pagesExamen de Structures en PlasticitéUrsula Joyce Merveilles Pettang Nana100% (1)
- Local Media4520591847555332887Document22 pagesLocal Media4520591847555332887Safa khalfounPas encore d'évaluation
- Chapitre 6 PDFDocument34 pagesChapitre 6 PDFDiana DiaconescuPas encore d'évaluation
- TP04 Ferme SimpleDocument12 pagesTP04 Ferme SimpleSheila TurnerPas encore d'évaluation
- Resume Du Cours MefDocument20 pagesResume Du Cours MefAdel yassine BelkhiriPas encore d'évaluation
- GCHYD MI VOA Chap3 Theorie PlasticiteDocument15 pagesGCHYD MI VOA Chap3 Theorie Plasticitebouabdallah abdelkarimPas encore d'évaluation
- Cours 4 Barres - 11Document11 pagesCours 4 Barres - 11kader100% (1)
- Cours Béton Précontraint Chapitre7Document7 pagesCours Béton Précontraint Chapitre7William KellerPas encore d'évaluation
- TD1 1Document1 pageTD1 1Salsabil MhPas encore d'évaluation
- Treillis Isostatiques Cour Et TDDocument10 pagesTreillis Isostatiques Cour Et TDdesiréPas encore d'évaluation
- Bu 3 Flambage v2Document5 pagesBu 3 Flambage v2Klolay Bledja Cyntiche AllaPas encore d'évaluation
- Notes RDM 2GCEIM-1Document118 pagesNotes RDM 2GCEIM-1Jourdain KamufuenketePas encore d'évaluation
- Exercices 1Document8 pagesExercices 1Bekraoui Keltoum100% (1)
- Propagation Des Ondes SismiquesDocument19 pagesPropagation Des Ondes Sismiquesdjeddi mabrouk86% (7)
- Recueil2007 Partie1Document7 pagesRecueil2007 Partie1benyfirstPas encore d'évaluation
- Chap 6 - Flambement 2019 - 2020Document9 pagesChap 6 - Flambement 2019 - 2020mathildePas encore d'évaluation
- (RDM) - TD1 - 2020-21Document4 pages(RDM) - TD1 - 2020-21Soh AibPas encore d'évaluation
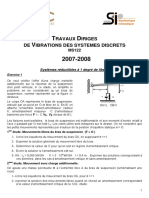
- TD de Vibrations Des Systemes Discrets + SolutionDocument33 pagesTD de Vibrations Des Systemes Discrets + SolutionAfif Al Baalbaki50% (6)
- Principaux Types D'essais Triaxiaux - DDocument9 pagesPrincipaux Types D'essais Triaxiaux - Dmerouanimanel25Pas encore d'évaluation
- Systeme Arc TirantDocument8 pagesSysteme Arc TirantGiovanni VicicontePas encore d'évaluation
- Chapitre 5 Resistance Des Poutres Isostatiques en BP en Flexion Post Tension Classe I 2018-2019Document12 pagesChapitre 5 Resistance Des Poutres Isostatiques en BP en Flexion Post Tension Classe I 2018-2019Oussama AggounPas encore d'évaluation
- Cours Et Exercice RDMDocument112 pagesCours Et Exercice RDMYassinDZ100% (11)
- CH 18 TreillisDocument22 pagesCH 18 TreillisSanae Ihsane100% (1)
- Exo MMC FrançaisDocument5 pagesExo MMC Françaislilian.boultareauPas encore d'évaluation
- RDM: Lignes D'influenceDocument9 pagesRDM: Lignes D'influenceSimou El MahmodiPas encore d'évaluation
- Ligne InfluenceDocument16 pagesLigne InfluencePaky MaigaPas encore d'évaluation
- RDM: Méthode de CROSSDocument10 pagesRDM: Méthode de CROSSSimou El Mahmodi75% (4)
- Cours 1Document18 pagesCours 1Robert PrincePas encore d'évaluation
- Chapitre 2Document7 pagesChapitre 2azul100% (1)
- Chapitre 2 Calcul Plastique Des StructuresDocument18 pagesChapitre 2 Calcul Plastique Des StructuresAmineLospiratas100% (1)
- Fascicule TPDocument34 pagesFascicule TPBillPas encore d'évaluation
- Calcul Des TirantsDocument3 pagesCalcul Des TirantsOmar OubahaPas encore d'évaluation
- 10 Colonnes CourtesDocument4 pages10 Colonnes Courtesfoufou2003Pas encore d'évaluation
- Examen 2017Document8 pagesExamen 2017NANA ElsaPas encore d'évaluation
- Elasticite PolyDocument14 pagesElasticite PolyYoucef KherroubiPas encore d'évaluation
- ExerciceDocument1 pageExerciceAbdelhamid BabahPas encore d'évaluation
- TD Oscillateurs Mecaniques Libres 2016Document7 pagesTD Oscillateurs Mecaniques Libres 2016Oumar TraoréPas encore d'évaluation
- Elasticité Linéaire Partie 1 & 2 - CopieDocument41 pagesElasticité Linéaire Partie 1 & 2 - CopieAbdelilah Ait IchouPas encore d'évaluation
- Exercices 2Document9 pagesExercices 2brahim_mdPas encore d'évaluation
- Chapitre 3 Complements - Trace Des DiagrammesDocument4 pagesChapitre 3 Complements - Trace Des Diagrammeswilfried LokdomPas encore d'évaluation
- Chapitre III: L'analyse Push OverDocument20 pagesChapitre III: L'analyse Push OverskylarshinePas encore d'évaluation
- Statique 7Document9 pagesStatique 7assPas encore d'évaluation
- TD Equilibre Dun Solide Soumis A Des Forces Non Paralleles 2s 1Document3 pagesTD Equilibre Dun Solide Soumis A Des Forces Non Paralleles 2s 1Daouda Fall100% (1)
- System HyperstatiqueDocument2 pagesSystem HyperstatiqueYuùri GimmsPas encore d'évaluation
- TD MomentsDocument4 pagesTD Momentsclaasaalll50% (2)
- Longueur de FlambementDocument17 pagesLongueur de FlambementDjibril Uchiwa100% (1)
- Ourabah AdnaneDocument9 pagesOurabah AdnaneYO Batia BiiPas encore d'évaluation
- Master GeotechniqueDocument51 pagesMaster Geotechniquehamza100% (1)
- FT Innogeo Methode MagnetiqueDocument2 pagesFT Innogeo Methode MagnetiqueIsraa DriciPas encore d'évaluation
- ExposéDocument11 pagesExposéIsraa DriciPas encore d'évaluation
- Chap I Rappels MDS Part 2 Résistance Aux CisaillementDocument13 pagesChap I Rappels MDS Part 2 Résistance Aux CisaillementIsraa DriciPas encore d'évaluation
- Chap I Rappels MDS Part 1 CompressbSolDocument14 pagesChap I Rappels MDS Part 1 CompressbSolIsraa DriciPas encore d'évaluation
- Chapitre IV Formes Liquides 2020Document5 pagesChapitre IV Formes Liquides 2020NAILA HADJIPas encore d'évaluation
- Les AciersDocument2 pagesLes AciersZaarad ZakariaPas encore d'évaluation
- 02 X AC Polymers BiosoucésDocument8 pages02 X AC Polymers Biosoucésmoine dorotheePas encore d'évaluation
- UranuimDocument40 pagesUranuimOussama DhahriPas encore d'évaluation
- Programme de Technologie Terminale F3Document31 pagesProgramme de Technologie Terminale F3Bill Pitinguele95% (22)
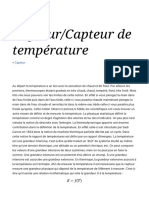
- Capteur - Capteur de Température - WikiversitéDocument24 pagesCapteur - Capteur de Température - WikiversitéYussuf AdeniyiPas encore d'évaluation
- Uv Visible PDFDocument72 pagesUv Visible PDFabadaze hasnaPas encore d'évaluation
- TP 03 Dosage Des Sucres Réductuers Par DNSDocument2 pagesTP 03 Dosage Des Sucres Réductuers Par DNSAhmed SaciPas encore d'évaluation
- TP36 MasseVolumique2021Document2 pagesTP36 MasseVolumique2021Mouhamed NadirPas encore d'évaluation
- Schemat Mercury Optimax 175Document12 pagesSchemat Mercury Optimax 175Wiesiek RabczukPas encore d'évaluation
- TD 2 Thermodynamique Corrigé PDFDocument4 pagesTD 2 Thermodynamique Corrigé PDFamiramPas encore d'évaluation
- Décret Exécutif N° 06-141 Défifnssant Les Valeurs Limites Des Rejets D'effluent Liquide IndustrielDocument7 pagesDécret Exécutif N° 06-141 Défifnssant Les Valeurs Limites Des Rejets D'effluent Liquide IndustrielSamir AmeurPas encore d'évaluation
- Microalbumin Microalbumin: Domaine D'ApplicationDocument6 pagesMicroalbumin Microalbumin: Domaine D'ApplicationFouad RahiouyPas encore d'évaluation
- Mini Projet DeramouneDocument31 pagesMini Projet Deramouneamal amoulaPas encore d'évaluation
- O.U TP1Document2 pagesO.U TP1Adel Adaika85% (13)
- Chp2 Thermique de L'enveloppe Des Batis 18Document7 pagesChp2 Thermique de L'enveloppe Des Batis 18Chemali RamziPas encore d'évaluation
- Book Allura DecibelDocument6 pagesBook Allura DecibelEman EmyPas encore d'évaluation
- Bloc D'angle R+6Document31 pagesBloc D'angle R+6farid RezigPas encore d'évaluation
- Exercice NDocument5 pagesExercice Nkolabot100% (3)
- Reacteurs ChimiquesDocument25 pagesReacteurs ChimiquesKader Touri100% (2)
- 3 Chimie Chap5 Cours de Cinetique ChimiqueDocument9 pages3 Chimie Chap5 Cours de Cinetique ChimiqueanaPas encore d'évaluation
- TD2 Thermo FSSM 2022-2023Document2 pagesTD2 Thermo FSSM 2022-2023عبدالغني السوسيPas encore d'évaluation
- Equations de MaxwellDocument2 pagesEquations de MaxwellWalid StambouliPas encore d'évaluation
- Formulation de BetonDocument8 pagesFormulation de BetonKihel OmarPas encore d'évaluation
- Chapitre 3 La Membrane Plasmique MedDocument6 pagesChapitre 3 La Membrane Plasmique MedDear tynaPas encore d'évaluation
- Correction Exercice Loi ArrhenuisDocument5 pagesCorrection Exercice Loi Arrhenuisimane bendaPas encore d'évaluation
- Aroma-Zone - Actif Cosmetique Actif Concentre Anti-Capitons Aroma-Zone - 17686Document6 pagesAroma-Zone - Actif Cosmetique Actif Concentre Anti-Capitons Aroma-Zone - 17686Stephanie HsuehPas encore d'évaluation
- La Chimie A Partir de ZeroDocument34 pagesLa Chimie A Partir de ZeroRudy Vuanga100% (2)
- CH9 - Force Des Acides Et Des Bases - ElevDocument4 pagesCH9 - Force Des Acides Et Des Bases - ElevmarinPas encore d'évaluation
- Nussbaum Montagehelfer KunststoffDocument336 pagesNussbaum Montagehelfer KunststoffSimon BrändlePas encore d'évaluation
- Manuel pour les débutants Fabriquez des savons naturelsD'EverandManuel pour les débutants Fabriquez des savons naturelsÉvaluation : 3 sur 5 étoiles3/5 (2)
- Harmonisation Energétique des Personnes: Manuel de Curothérapie 2020D'EverandHarmonisation Energétique des Personnes: Manuel de Curothérapie 2020Évaluation : 4 sur 5 étoiles4/5 (8)
- Le profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésD'EverandLe profilage au service du football: Démarche scientifique pour un recrutement et entraînements optimisésPas encore d'évaluation
- Un régime quantiqueD'EverandUn régime quantiqueÉvaluation : 5 sur 5 étoiles5/5 (1)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- L'Ombre à l'Univers: La structure des particules élémentaires XIIfD'EverandL'Ombre à l'Univers: La structure des particules élémentaires XIIfPas encore d'évaluation
- Théorie relative de la musique: Maîtriser le mouvement par la logique des intervallesD'EverandThéorie relative de la musique: Maîtriser le mouvement par la logique des intervallesÉvaluation : 4 sur 5 étoiles4/5 (1)
- La pensée dirigée: Traité sur le raisonnement et les logiquesD'EverandLa pensée dirigée: Traité sur le raisonnement et les logiquesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Physique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresD'EverandPhysique quantique pour les débutants: Découvrez les fondements de la mécanique quantique et la façon dont elle affecte le monde dans lequel nous vivons à travers ses théories les plus célèbresÉvaluation : 5 sur 5 étoiles5/5 (2)
- le Phoenix de nos âmes: Les lois énergétiques de la lumière divineD'Everandle Phoenix de nos âmes: Les lois énergétiques de la lumière divinePas encore d'évaluation
- Voyager à Travers les Mondes Parallèles pour Atteindre vos RêvesD'EverandVoyager à Travers les Mondes Parallèles pour Atteindre vos RêvesÉvaluation : 4 sur 5 étoiles4/5 (11)
- Encyclopédie de la magie des cristaux, des pierres précieuses et des métauxD'EverandEncyclopédie de la magie des cristaux, des pierres précieuses et des métauxÉvaluation : 4 sur 5 étoiles4/5 (116)
- L'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.D'EverandL'univers est intelligent. L'âme existe. Mystères quantiques, multivers, intrication, synchronicité. Au-delà de la matérialité, pour une vision spirituelle du cosmos.Pas encore d'évaluation
- Bioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainD'EverandBioénergie et Sciences Occultes: Pour un corps sain et un esprit sain dans un lieu sainÉvaluation : 4 sur 5 étoiles4/5 (2)
- La Conscience Et L'Univers Existent Sans Commencement Ni FinD'EverandLa Conscience Et L'Univers Existent Sans Commencement Ni FinPas encore d'évaluation
- Voyage au-delà du corps: L'exploration de nos Univers intérieursD'EverandVoyage au-delà du corps: L'exploration de nos Univers intérieursÉvaluation : 4.5 sur 5 étoiles4.5/5 (20)
- Chromatographie: Les Grands Articles d'UniversalisD'EverandChromatographie: Les Grands Articles d'UniversalisPas encore d'évaluation
- Sur les fondements de la théorie des ensembles transfinisD'EverandSur les fondements de la théorie des ensembles transfinisPas encore d'évaluation
- Signe pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FranceD'EverandSigne pour le Saint Graal? Énergie infinie avec des possibilités infinies! Mesurer avec l’antenne de Lecher à Carnac et en Bretagne en FrancePas encore d'évaluation
- La somme existentielle II/III Le mystère de l'homme: Un mystère d'amourD'EverandLa somme existentielle II/III Le mystère de l'homme: Un mystère d'amourPas encore d'évaluation