Vous aimerez peut-être aussi
- Correction TD Capteur Actionneur 22042020 PDFDocument4 pagesCorrection TD Capteur Actionneur 22042020 PDFAmdouni AmeniPas encore d'évaluation
- Série: Théorie de Coupe Exercice1Document13 pagesSérie: Théorie de Coupe Exercice1Yassine chahbounPas encore d'évaluation
- OptimisationDocument4 pagesOptimisationredwane ouberri100% (1)
- TD Entrainement Électrique Avec SolutionDocument5 pagesTD Entrainement Électrique Avec Solutionاحمد AHMED بوحوتةBOUHOUTAPas encore d'évaluation
- Correction TP Pousse SeringueDocument4 pagesCorrection TP Pousse SeringueAlfredho ShactarPas encore d'évaluation
- Examen CorrDocument2 pagesExamen Corri aliliPas encore d'évaluation
- TD Solitio TurbomachineDocument6 pagesTD Solitio TurbomachineYahiyaoui SofyanePas encore d'évaluation
- Intra A20 Differe CorrigeDocument9 pagesIntra A20 Differe CorrigeHajar AkaouchPas encore d'évaluation
- TP 2Document5 pagesTP 2Hamza HachimPas encore d'évaluation
- TP N Ondes Et Vibrations PDFDocument26 pagesTP N Ondes Et Vibrations PDFfedlaoui67% (3)
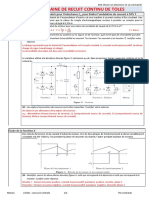
- dm14 - dc04 - Chaine de Recuit Suite-CorDocument6 pagesdm14 - dc04 - Chaine de Recuit Suite-CorPenda NiassPas encore d'évaluation
- Etude Comparative Entre La Commande Vectorielle Et La Commande ScalaireDocument11 pagesEtude Comparative Entre La Commande Vectorielle Et La Commande ScalaireMohammed Reda Gaila100% (2)
- Ben Hamed Partie 3Document34 pagesBen Hamed Partie 3DABAKH LDEEBOYPas encore d'évaluation
- Solutions - Des - Exercices Capteurs Et MétrologieDocument3 pagesSolutions - Des - Exercices Capteurs Et MétrologieRIAD POK TVPas encore d'évaluation
- Commande PWM Moteurs PDFDocument5 pagesCommande PWM Moteurs PDFHasibKaabiPas encore d'évaluation
- TD01 CO - Solutions-2021-2022Document3 pagesTD01 CO - Solutions-2021-2022Aldo SteronePas encore d'évaluation
- TP3 Moteur Courant Continu HacheurDocument7 pagesTP3 Moteur Courant Continu HacheurYou CefPas encore d'évaluation
- Les Études R&R - Méthode Des ÉtenduesDocument3 pagesLes Études R&R - Méthode Des Étendueslenovoi711gPas encore d'évaluation
- TD N°3Document7 pagesTD N°3Nabil Mekimah100% (1)
- Parties 03 Et 04Document7 pagesParties 03 Et 04Mehdi JANNATPas encore d'évaluation
- Projet: Réalisation D'un Thermomètre Intérieur: Arcangeli Mickaël Dellarosa SonnyaDocument16 pagesProjet: Réalisation D'un Thermomètre Intérieur: Arcangeli Mickaël Dellarosa SonnyaSonnya DellarosaPas encore d'évaluation
- Compte Rendu - TP - Electronique de PuissanceDocument22 pagesCompte Rendu - TP - Electronique de Puissancemohamed moustainePas encore d'évaluation
- Corrigé TD MAS TEER S5 2020Document8 pagesCorrigé TD MAS TEER S5 2020Harry PoterPas encore d'évaluation
- Ac CH 8Document19 pagesAc CH 8Ehmed BazPas encore d'évaluation
- Rapport Regulation VitesseDocument9 pagesRapport Regulation Vitessetwiha000Pas encore d'évaluation
- PROJET DE Transmission PuissanceDocument59 pagesPROJET DE Transmission Puissancewoukouo100% (1)
- TP Systemes Asservis Lineaires 2-1Document2 pagesTP Systemes Asservis Lineaires 2-1Christian Le Drums Emadjui100% (1)
- Travail A Rendre Statistique 2Document9 pagesTravail A Rendre Statistique 2Reda elalyaniPas encore d'évaluation
- Ofppt: Office de La Formation Professionnelle Et de La Promotion Du TravailDocument7 pagesOfppt: Office de La Formation Professionnelle Et de La Promotion Du Travailouissal electroPas encore d'évaluation
- Série 3 Corrigé de 1 À 6Document2 pagesSérie 3 Corrigé de 1 À 6rihabPas encore d'évaluation
- Pendule de Pohl (Réparé) .Docx Version 1Document16 pagesPendule de Pohl (Réparé) .Docx Version 1Mr AhmedPas encore d'évaluation
- Mas VariateurDocument4 pagesMas VariateurHicham BAQQASPas encore d'évaluation
- Corrigé Synthése ESA 2022 (TEST3)Document10 pagesCorrigé Synthése ESA 2022 (TEST3)otmane touilPas encore d'évaluation
- P Hyper PDFDocument27 pagesP Hyper PDFSabri Mohamed100% (1)
- TP3 Loscilloscope Converti PDFDocument10 pagesTP3 Loscilloscope Converti PDFSouhil RingoPas encore d'évaluation
- Travail À Rendre 2:: 1. Questions de CoursDocument5 pagesTravail À Rendre 2:: 1. Questions de CoursEs.sabery IsmailPas encore d'évaluation
- Labo 3 Thevenin Et NortonDocument7 pagesLabo 3 Thevenin Et NortonGuilhermeMartinsGonçalvesPas encore d'évaluation
- Solutions - Des - Exercices Capteurs Et MétrologieDocument3 pagesSolutions - Des - Exercices Capteurs Et MétrologieAnis Latreche100% (1)
- Compte Rendue TP Mcen1 (1) .Docx A ContinuerDocument24 pagesCompte Rendue TP Mcen1 (1) .Docx A ContinuerMouhamed AmarPas encore d'évaluation
- Exercices Corriges Capteurs Et InstrumentationDocument46 pagesExercices Corriges Capteurs Et InstrumentationhahadaPas encore d'évaluation
- Compte - Rendu - Tp3Document10 pagesCompte - Rendu - Tp3soumiaabdellaoui.esi2aPas encore d'évaluation
- TD 01 2018Document7 pagesTD 01 2018Imad RahmounPas encore d'évaluation
- Exercice VariateurDocument4 pagesExercice VariateurHicham BAQQASPas encore d'évaluation
- DynamiqueDocument23 pagesDynamiqueSaidPas encore d'évaluation
- Corrige - TDDocument6 pagesCorrige - TDDouha MOUFADILPas encore d'évaluation
- Electricite tp.1Document6 pagesElectricite tp.1malak himdiPas encore d'évaluation
- SodapdfDocument1 pageSodapdfImad NassiriPas encore d'évaluation
- Les Études R&R - Méthode Des ÉtenduesDocument3 pagesLes Études R&R - Méthode Des ÉtenduesKhalil AOUADPas encore d'évaluation
- Commande PWM Moteurs PDFDocument5 pagesCommande PWM Moteurs PDFAnonymous 9nvR8ouZgPas encore d'évaluation
- Corrige S Polyne Sie 14 Juin 2017 ADDocument10 pagesCorrige S Polyne Sie 14 Juin 2017 ADEsraa Ali MashaiPas encore d'évaluation
- TP 4.Document7 pagesTP 4.abdoubouguenaraPas encore d'évaluation
- Mecanique TP 1 Compte Rendu (V 1)Document7 pagesMecanique TP 1 Compte Rendu (V 1)mayssam benmim100% (1)
- Cours Reducteurs de VitesseDocument1 pageCours Reducteurs de VitesseYassine Elbiad100% (2)
- Commande PWM MoteursDocument5 pagesCommande PWM MoteurszaidifaroukPas encore d'évaluation
- TP_HACHEUR_A1.2Document10 pagesTP_HACHEUR_A1.2biticar85Pas encore d'évaluation
- 1-Introduction: - Redressement:: I-Redressement MonoaltérnanceDocument7 pages1-Introduction: - Redressement:: I-Redressement MonoaltérnanceOussama BenmoussaPas encore d'évaluation
- Analyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2D'EverandAnalyse Mathématique pour l'ingénieur: Analyse Mathématique pour l'ingénieur, #2Pas encore d'évaluation
- Evaluation Tuteur StageDocument1 pageEvaluation Tuteur StageINISSIRE FHDPas encore d'évaluation
- Tirage Des Circuits ImprimésDocument3 pagesTirage Des Circuits ImprimésINISSIRE FHD100% (1)
- Series de Fourier Aux ExamensDocument2 pagesSeries de Fourier Aux ExamensINISSIRE FHDPas encore d'évaluation
- COL Fessenheim Rapport de Stage Jetcat 2019 - 3eDocument12 pagesCOL Fessenheim Rapport de Stage Jetcat 2019 - 3eKhalid PagesPas encore d'évaluation
- TP 1 LABVIEW - InitiationLABVIEWDocument4 pagesTP 1 LABVIEW - InitiationLABVIEWINISSIRE FHD100% (2)
- TP TD-LPC 2021Document32 pagesTP TD-LPC 2021Ayman SouhaibPas encore d'évaluation
- Institut Supérieur D'electronique de Paris Rapport de Stage - Deuxième Année de Cycle IngénieurDocument35 pagesInstitut Supérieur D'electronique de Paris Rapport de Stage - Deuxième Année de Cycle Ingénieurmaurel EwokouPas encore d'évaluation
- Comment Faire Son Rapport de Stage en 3eDocument3 pagesComment Faire Son Rapport de Stage en 3eHajar Bouhlal100% (1)
- Evaluation Tuteur StageDocument1 pageEvaluation Tuteur StageINISSIRE FHDPas encore d'évaluation
- Initiation MatlabDocument6 pagesInitiation MatlabINISSIRE FHDPas encore d'évaluation
- Colpte Rendu TP TninDocument4 pagesColpte Rendu TP TninINISSIRE FHDPas encore d'évaluation
- ESSAHLI1Document66 pagesESSAHLI1ErnestPas encore d'évaluation
- TP Atelier222Document6 pagesTP Atelier222INISSIRE FHDPas encore d'évaluation
- FAHMI TPDocument10 pagesFAHMI TPINISSIRE FHDPas encore d'évaluation
- CapteursDocument12 pagesCapteursMôhãmêd BèñPas encore d'évaluation
- Série Exercices1Document5 pagesSérie Exercices1Mouncef El Marghichi100% (3)
- Compte Rendu 1111Document7 pagesCompte Rendu 1111INISSIRE FHDPas encore d'évaluation
- TCH 025 Ets Diagnostic Ptie 1 h08Document69 pagesTCH 025 Ets Diagnostic Ptie 1 h08Anonymous Zz5ljwwtPas encore d'évaluation
- CORRIGE MACRO L1 Sept 2005Document7 pagesCORRIGE MACRO L1 Sept 2005souad mhiriPas encore d'évaluation
- Résumé de Géologie 2024Document2 pagesRésumé de Géologie 2024Kotbi MohamedPas encore d'évaluation
- Exposé Géotechnique RoutiéreDocument43 pagesExposé Géotechnique RoutiéreMamadou SowPas encore d'évaluation
- Maisons Bell - Constructeur de Maisons Individuelles Haut de GammeDocument8 pagesMaisons Bell - Constructeur de Maisons Individuelles Haut de GammeDiogo FernandesPas encore d'évaluation
- 01 - La Fonction MaintenanceDocument3 pages01 - La Fonction Maintenancebouazizi_sPas encore d'évaluation
- IMECO CatalogueDocument31 pagesIMECO Catalogueasiyapcommercial1Pas encore d'évaluation
- Pages Choisie S 18800 B LoyDocument432 pagesPages Choisie S 18800 B LoyMathieu Victor100% (1)
- Etude de Cas - Cycle de Vente ClientDocument2 pagesEtude de Cas - Cycle de Vente ClientYOUNES JOUHARI100% (2)
- Recristallisation Et Temperature de FusionDocument9 pagesRecristallisation Et Temperature de FusionhamoumPas encore d'évaluation
- Fondamentaux Communication D'entrepriseDocument10 pagesFondamentaux Communication D'entreprisefallPas encore d'évaluation
- Livret Pédagogique EAD PHILOSOPHIE 2017-2018Document113 pagesLivret Pédagogique EAD PHILOSOPHIE 2017-2018Anonymous LOcT0gjqdSPas encore d'évaluation
- BL30 - Effecteurs MusculairesDocument32 pagesBL30 - Effecteurs MusculairesAmine El ZergPas encore d'évaluation
- Pierre Teilhard Du Chardin - Le Coeur de La MatièreDocument230 pagesPierre Teilhard Du Chardin - Le Coeur de La Matièrestis73100% (1)
- 203-Article Text-754-1-10-20200802Document18 pages203-Article Text-754-1-10-20200802Ahmed MardasPas encore d'évaluation
- Cours 04 Le Rationalisme Et Les Visionnaires Du 18eme Siècle PDFDocument57 pagesCours 04 Le Rationalisme Et Les Visionnaires Du 18eme Siècle PDFBen Aribe AymenPas encore d'évaluation
- Pannes Et Depannage D'un GeDocument5 pagesPannes Et Depannage D'un GeYacoubaPas encore d'évaluation
- Aubenque Problemes AristoteliciensDocument2 pagesAubenque Problemes AristoteliciensAmwin minm0% (1)
- Guide Aplus2Document138 pagesGuide Aplus2Galilea RuanoPas encore d'évaluation
- Calculs Façades Mills PDFDocument1 pageCalculs Façades Mills PDFRalf Lo100% (1)
- Cours D'économie de Production Niveau 5-1Document68 pagesCours D'économie de Production Niveau 5-1Leo Jospinho100% (1)
- Bottero, Pierre - (La Quete D'ewilan-3) L'ile Du DestinDocument265 pagesBottero, Pierre - (La Quete D'ewilan-3) L'ile Du DestinNaheuPas encore d'évaluation
- 05 SPEH ICE PartB 2015Document46 pages05 SPEH ICE PartB 2015Anas LahlouPas encore d'évaluation
- Vinçotte Installation Domestique Electrique 2022 FRDocument40 pagesVinçotte Installation Domestique Electrique 2022 FRPetar PetrovPas encore d'évaluation
- Guide 1Document16 pagesGuide 1Ktat fatmaPas encore d'évaluation
- 2020 Concours Centrale Supélec Physique Chimie 1 TSI Corrige 3Document5 pages2020 Concours Centrale Supélec Physique Chimie 1 TSI Corrige 3mpofPas encore d'évaluation
- Facebook Mot de Passe Hack GratuitDocument2 pagesFacebook Mot de Passe Hack Gratuitlegalcategory245Pas encore d'évaluation
- Ligne Minière Est 27 06 18 VFDocument46 pagesLigne Minière Est 27 06 18 VFAbbas EulmiPas encore d'évaluation
- Lecture Facile Le Chauffeur Deinstein - 149298Document1 pageLecture Facile Le Chauffeur Deinstein - 149298Hajar EL ABBADIPas encore d'évaluation
- E Change UrsDocument10 pagesE Change UrsDJEVOU AurelPas encore d'évaluation