Vous aimerez peut-être aussi
- TD N 3 SolutionDocument3 pagesTD N 3 SolutionSamira ChochoPas encore d'évaluation
- Exo27 Bases Applications LineairesDocument1 pageExo27 Bases Applications LineaireskkPas encore d'évaluation
- 152 2 Pince Ericc3 Version2 CorrigeDocument2 pages152 2 Pince Ericc3 Version2 CorrigeChaymae OuahmanePas encore d'évaluation
- 13 Statique Principe de SuperpositionDocument1 page13 Statique Principe de SuperpositionMamadou Bamba0% (1)
- Torseur CorrigéDocument3 pagesTorseur Corrigéyasser bhPas encore d'évaluation
- Devoir de Contrôle N°2 - Sciences PhysiquesDocument3 pagesDevoir de Contrôle N°2 - Sciences Physiqueskougfst ldhd100% (1)
- Position D Un Solide CorrigeDocument4 pagesPosition D Un Solide Corrigekurts010Pas encore d'évaluation
- Dev Phys3 19-20Document2 pagesDev Phys3 19-20Abdelouahab ChPas encore d'évaluation
- Addition NeurDocument56 pagesAddition NeurSarra BounenniPas encore d'évaluation
- Correct Serie2Document3 pagesCorrect Serie2hajar benayadPas encore d'évaluation
- Série de Physique Thème: Dipôle RL+ Circuit RLC Amorti Exercice N°1Document2 pagesSérie de Physique Thème: Dipôle RL+ Circuit RLC Amorti Exercice N°1Amine AlaoUii AlaouiPas encore d'évaluation
- DS N°4 22-23 Du 20-02-2023OKDocument2 pagesDS N°4 22-23 Du 20-02-2023OKmangamanaPas encore d'évaluation
- TP Lignes D'InfluencesDocument9 pagesTP Lignes D'Influenceslando de chancePas encore d'évaluation
- 4 Sc. I - Bac 2010 - Session Cont. - Corrigée - Physique - CDocument4 pages4 Sc. I - Bac 2010 - Session Cont. - Corrigée - Physique - CMamoo MoutiâPas encore d'évaluation
- TP # - 2 PDFDocument6 pagesTP # - 2 PDFAya IrmaPas encore d'évaluation
- TP 2 RDMDocument6 pagesTP 2 RDMMiloud100% (1)
- Revision Electricite PR SEDRA PDFDocument19 pagesRevision Electricite PR SEDRA PDFASMAPas encore d'évaluation
- Synthèse 2002-2003Document7 pagesSynthèse 2002-2003Gumball 3303Pas encore d'évaluation
- Ampli SélectifDocument5 pagesAmpli SélectifRiham abPas encore d'évaluation
- Devoir 2 78Document5 pagesDevoir 2 78anoiriPas encore d'évaluation
- Corrige Serie2 RDM1 2020 2021Document8 pagesCorrige Serie2 RDM1 2020 2021zyad ouddouPas encore d'évaluation
- Cours O.Unitaire Extraction L-L (Partie 4) L3 GPDocument9 pagesCours O.Unitaire Extraction L-L (Partie 4) L3 GPMål ÆkPas encore d'évaluation
- 3e DS1 2010 2011Document3 pages3e DS1 2010 2011fethi1100% (1)
- Chapitre 3 - Suite - Circuits Combinatoires Circuits ArithmétiquesDocument6 pagesChapitre 3 - Suite - Circuits Combinatoires Circuits ArithmétiquesRaya NePas encore d'évaluation
- PC Bac 2 Blanc Serie DDocument2 pagesPC Bac 2 Blanc Serie Dmoctarnassirou2Pas encore d'évaluation
- Devoir de Synthèse N°3 - Sciences Physiques - Bac Sciences Exp (2011-2012) MR THIELLODocument3 pagesDevoir de Synthèse N°3 - Sciences Physiques - Bac Sciences Exp (2011-2012) MR THIELLOMohamed SaidiPas encore d'évaluation
- Amplificateur SélectifDocument5 pagesAmplificateur SélectifOthman NchifaPas encore d'évaluation
- Compos TleDDocument2 pagesCompos TleDkoffi DOUNEGBLOEPas encore d'évaluation
- Anabac (1995 - 2005) CorrectionDocument27 pagesAnabac (1995 - 2005) CorrectionSYLVAIN KOUADIOPas encore d'évaluation
- Série D'exercices N°2 - Sciences Physiques LA BOBINE ET LE DIPOLE RL - Bac Sciences Exp (2015-2016) MR Daghsni Sahbi PDFDocument5 pagesSérie D'exercices N°2 - Sciences Physiques LA BOBINE ET LE DIPOLE RL - Bac Sciences Exp (2015-2016) MR Daghsni Sahbi PDFMahmoud Essahbi Sahbi DaghsniPas encore d'évaluation
- Upload - Série D'exercices N°11-3tech-Microcontrôleur-2013-2014-CorrectionDocument14 pagesUpload - Série D'exercices N°11-3tech-Microcontrôleur-2013-2014-CorrectionOumaima AbdelwahedPas encore d'évaluation
- Sujet PC Serie C Session 2015Document4 pagesSujet PC Serie C Session 2015riantsoaPas encore d'évaluation
- Sciences Physiques Auto InductionDocument4 pagesSciences Physiques Auto InductionMahmoud Gazzah0% (1)
- Chapitre 1 2 Algebre de Boole Et Fonctions LogiquesDocument20 pagesChapitre 1 2 Algebre de Boole Et Fonctions LogiquesIddir YuderPas encore d'évaluation
- Sujet MR CorrigéDocument6 pagesSujet MR Corrigéasmaberkaine0Pas encore d'évaluation
- Lecturefichiergw - doID FICHIER 1304405621517Document4 pagesLecturefichiergw - doID FICHIER 1304405621517snex971Pas encore d'évaluation
- Induction: I. Dispositifs À Induction Dans Un VéhiculeDocument1 pageInduction: I. Dispositifs À Induction Dans Un VéhiculeYouness BilouchePas encore d'évaluation
- TD Diagonalisation - TrigonalisationDocument2 pagesTD Diagonalisation - TrigonalisationSamuel OlojedePas encore d'évaluation
- Série Théorèmes GénérauxDocument3 pagesSérie Théorèmes Générauxsalem nourPas encore d'évaluation
- Devoir de Contrôle N°1 - Physique - 2ème Sciences (2022-2023) MR ZHRDocument4 pagesDevoir de Contrôle N°1 - Physique - 2ème Sciences (2022-2023) MR ZHRyasminmarouani02Pas encore d'évaluation
- h3 - TC - Automatique - Qca 2003 2004 - Hei 33 34 - Qca Hei 33 34 - 1489Document2 pagesh3 - TC - Automatique - Qca 2003 2004 - Hei 33 34 - Qca Hei 33 34 - 1489Nabil LivePas encore d'évaluation
- Serie 3 SMP5 (2020-2021)Document4 pagesSerie 3 SMP5 (2020-2021)mohamedPas encore d'évaluation
- Chapitre 3 Les Systemes CombinatoiresDocument16 pagesChapitre 3 Les Systemes CombinatoiresOussama EljaafariPas encore d'évaluation
- Devoir de Synthèse N°2 - Sciences Physiques - 2ème Technique (2019-2020) MR Mansouri AmorDocument4 pagesDevoir de Synthèse N°2 - Sciences Physiques - 2ème Technique (2019-2020) MR Mansouri AmorAbdessattar ChandoulPas encore d'évaluation
- Sec Mines 2009 PhycomDocument12 pagesSec Mines 2009 PhycomIssa MAVOUNAPas encore d'évaluation
- Longueurs Des Chapeaux Sur Appui IntermeDocument7 pagesLongueurs Des Chapeaux Sur Appui IntermeAmakhand EloyePas encore d'évaluation
- 8-Dipole RL Sous Signal Triangulaire-MaquassedDocument4 pages8-Dipole RL Sous Signal Triangulaire-MaquassedMohamed ElouakilPas encore d'évaluation
- Phys 2Document7 pagesPhys 2Sohayla ElkarsPas encore d'évaluation
- L PH4 Osillations Électriques Focées (Sciences)Document40 pagesL PH4 Osillations Électriques Focées (Sciences)mathegauss1230Pas encore d'évaluation
- TD 2 TorseursDocument5 pagesTD 2 Torseursfoufoua100% (1)
- Corrigé Bacc SPC Série D Session 2022Document7 pagesCorrigé Bacc SPC Série D Session 2022andoPas encore d'évaluation
- TD 4 Réduction D'endomorphismeDocument4 pagesTD 4 Réduction D'endomorphismehahaPas encore d'évaluation
- Dev23 24 2ieme SC MR Taoufik TrabelsiDocument2 pagesDev23 24 2ieme SC MR Taoufik Trabelsiعبد الفتاح الشقراويPas encore d'évaluation
- DS 6Document4 pagesDS 6Hanaa DaoudiPas encore d'évaluation
- Mac Application Torseur 2Document1 pageMac Application Torseur 2Bilel LaamiriPas encore d'évaluation
- Devoir de Synthèse N°1 Avec Correction - Sciences Physiques - Bac Sciences Exp (2013-2014) MR Kallel Chiheb PDFDocument13 pagesDevoir de Synthèse N°1 Avec Correction - Sciences Physiques - Bac Sciences Exp (2013-2014) MR Kallel Chiheb PDFAyoub AbidPas encore d'évaluation
- Examen de Synthèse de Mécanique Du SolideDocument3 pagesExamen de Synthèse de Mécanique Du SolideMESSAOUI0% (1)
- Travaux Dirigés N°1: Énoncés Des ExercicesDocument10 pagesTravaux Dirigés N°1: Énoncés Des ExercicesNdjidama youssoufaPas encore d'évaluation
- Poly GRHDocument66 pagesPoly GRHNinsPas encore d'évaluation
- TD Optique CoherenteDocument13 pagesTD Optique CoherenteAnonymous 73gEYyEtLPas encore d'évaluation
- Reaction Nucleaire Chap I Blanc ModifDocument36 pagesReaction Nucleaire Chap I Blanc ModifBabaaziz Youness100% (1)
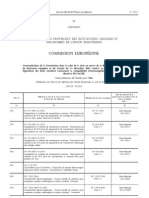
- Normes Harmonisées 2004 - 108 - CE 20121023Document20 pagesNormes Harmonisées 2004 - 108 - CE 20121023essaitest68Pas encore d'évaluation
- Equilibrage Des Machines TournantesDocument8 pagesEquilibrage Des Machines TournantesSam Dallali100% (6)
- Chapitre 1B Partie 1Document28 pagesChapitre 1B Partie 1rayan.delalayPas encore d'évaluation
- Vibration Et Les Ondes Mecanique UsthbDocument5 pagesVibration Et Les Ondes Mecanique UsthbKovax KovaxinovPas encore d'évaluation
- Ex. 19.2 Cylindres Sur Une Feuille de PapierDocument5 pagesEx. 19.2 Cylindres Sur Une Feuille de PapierDIBIPas encore d'évaluation
- Ordination TechniquesDocument82 pagesOrdination Techniquesقادة قنايةPas encore d'évaluation
- Plaquette PandoradvancedDocument7 pagesPlaquette PandoradvancedPANDORADVANCED (PANDORADVANCED)Pas encore d'évaluation
- Bilan ThermiqueDocument16 pagesBilan ThermiqueGuido PabisPas encore d'évaluation
- DS 2001 11 13Document2 pagesDS 2001 11 13الغزيزال الحسن EL GHZIZAL Hassane0% (1)
- Mécanique AnalytiqueDocument90 pagesMécanique Analytiquezoom scaipPas encore d'évaluation
- tp1 + tp2Document21 pagestp1 + tp2Abdallah OmezzinePas encore d'évaluation
- Envoi1 CorrigesDocument50 pagesEnvoi1 CorrigesGaetan MessanviPas encore d'évaluation
- Cahier de Texte F. Jehin 2008/2009 Ts2 Photonique: TP AMOS - ProjetsDocument6 pagesCahier de Texte F. Jehin 2008/2009 Ts2 Photonique: TP AMOS - ProjetsSalim KarimPas encore d'évaluation
- TD Medecine Phy 100 20 21Document3 pagesTD Medecine Phy 100 20 21adjidavibruno7Pas encore d'évaluation
- (Cin) (TD) Centrifugeuse HumaineDocument5 pages(Cin) (TD) Centrifugeuse HumaineOmar OmariPas encore d'évaluation
- Solide en Équilibre - TD N°6 - CorrectionDocument2 pagesSolide en Équilibre - TD N°6 - CorrectionIsaak houmadiPas encore d'évaluation
- Manuel Simplifié IR33-DN33-MD33 - Rel1.8 - 4 PagesDocument4 pagesManuel Simplifié IR33-DN33-MD33 - Rel1.8 - 4 Pagesabdc0123Pas encore d'évaluation
- Procédé de FabricationDocument121 pagesProcédé de Fabricationimane ait baddouPas encore d'évaluation
- Partie: 1 / 167 Temouden Lycée Technique Acharif Al Idrissi - Safi Atc / 2 STEDocument28 pagesPartie: 1 / 167 Temouden Lycée Technique Acharif Al Idrissi - Safi Atc / 2 STEMohammed TananiPas encore d'évaluation
- DAB CS4C-13 Pdfdescriptif - 10733 PDFDocument2 pagesDAB CS4C-13 Pdfdescriptif - 10733 PDFsellabi100% (1)
- Ultra SonsDocument33 pagesUltra Sonssaraswe56% (9)
- Cours Math Chapitre 6 Trigonométrie Et Mésures de Grandeurs MR Hamada)Document11 pagesCours Math Chapitre 6 Trigonométrie Et Mésures de Grandeurs MR Hamada)arfaoui eyaPas encore d'évaluation
- Canon CodesDocument32 pagesCanon CodesAmer RafiquePas encore d'évaluation
- 4353 Sujet Modelisation 2014 PDFDocument44 pages4353 Sujet Modelisation 2014 PDFNada Ghammem100% (1)
- Cours Vecteurs 2Document5 pagesCours Vecteurs 2elfiguigui2011Pas encore d'évaluation
- The First DiscipleDocument3 pagesThe First DiscipleEvil GamesPas encore d'évaluation
- Semestre 3 DS 2 2015-2016Document6 pagesSemestre 3 DS 2 2015-2016Abdelali YacoubiPas encore d'évaluation
- Os Opt Corrige Ch3Document24 pagesOs Opt Corrige Ch3RKT100% (1)