Vous aimerez peut-être aussi
- Devoir MecaniqueDocument2 pagesDevoir MecaniquePreparation TafemPas encore d'évaluation
- Ensembles Des NombresDocument4 pagesEnsembles Des Nombresmus jazPas encore d'évaluation
- Exercices Et Problèmes ProposésDocument4 pagesExercices Et Problèmes ProposésSelma SenioritaPas encore d'évaluation
- Constructions GéométriquesDocument22 pagesConstructions GéométriquesdjibrilabsaPas encore d'évaluation
- DSMG00 04 17Document4 pagesDSMG00 04 17lamiabejaouiPas encore d'évaluation
- Correction Série-6-Droite Dans Le Plan-TCSDocument4 pagesCorrection Série-6-Droite Dans Le Plan-TCSjamal jamalPas encore d'évaluation
- 7 - Format Bac Série C 200327-1Document7 pages7 - Format Bac Série C 200327-1Xray34Pas encore d'évaluation
- DS4 - 03mars2023 - Dossier TechDocument8 pagesDS4 - 03mars2023 - Dossier TechpoulnareffjeanPas encore d'évaluation
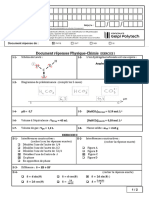
- Physique-Chimie: Baccalauréat Régional SESSION 2024Document4 pagesPhysique-Chimie: Baccalauréat Régional SESSION 2024Assi Armand Sylvène AssiPas encore d'évaluation
- Algebre TP1Document5 pagesAlgebre TP1ramazangs1905Pas encore d'évaluation
- Examen MATLAB 2017 2018Document2 pagesExamen MATLAB 2017 2018Ben YbiPas encore d'évaluation
- TP2 MatricesDocument1 pageTP2 Matricesajb4du100% (1)
- Corrige Physique Chimie 2023Document2 pagesCorrige Physique Chimie 2023nicolaslecharmant120% (1)
- TD 2 Liaisons Equivalentes Et Schema CinematiquDocument4 pagesTD 2 Liaisons Equivalentes Et Schema Cinematiquhana tliliPas encore d'évaluation
- 204 2Bm Nationaux Structures 2011Ss1-2012Ss2Document2 pages204 2Bm Nationaux Structures 2011Ss1-2012Ss2azizouali321Pas encore d'évaluation
- Serie Transformations Et Isométries TS1 WWW - Axloutoth.snDocument3 pagesSerie Transformations Et Isométries TS1 WWW - Axloutoth.snkathyPas encore d'évaluation
- 1sm TD Ens Appli SexeDocument5 pages1sm TD Ens Appli SexeyahyaassandiPas encore d'évaluation
- Exercice 1: Université Hassan II Faculté Des Sciences Aïn Chock - Casablanca 2022/2023Document2 pagesExercice 1: Université Hassan II Faculté Des Sciences Aïn Chock - Casablanca 2022/2023OUMPas encore d'évaluation
- TD CompilationDocument4 pagesTD CompilationLaurent NiorePas encore d'évaluation
- 909 2Bm National 2014 Ss1 EnoncéDocument3 pages909 2Bm National 2014 Ss1 EnoncéAmine HamdaouiPas encore d'évaluation
- David NOËL - DM de Statique Graphique Et Analytique - Pelleteuse PDFDocument4 pagesDavid NOËL - DM de Statique Graphique Et Analytique - Pelleteuse PDFSmith FrankPas encore d'évaluation
- TP 5 Essai de Flexion PDFDocument6 pagesTP 5 Essai de Flexion PDFFärĩdå TlemcenPas encore d'évaluation
- Mathématiques 1: 4 Heures Calculatrices AutoriséesDocument3 pagesMathématiques 1: 4 Heures Calculatrices AutoriséesMaxencelebaron tekouPas encore d'évaluation
- Devoir de Contrôle N°1 2008 2009 (Ben Brahim Khaled)Document2 pagesDevoir de Contrôle N°1 2008 2009 (Ben Brahim Khaled)zainebkassem8b7Pas encore d'évaluation
- 921 2Bm National 2008 Ss1 EnoncéDocument3 pages921 2Bm National 2008 Ss1 EnoncéBouzkri BOUZKRIPas encore d'évaluation
- Cours Mécanique Du Solide - Driouich - Chapitre 1Document11 pagesCours Mécanique Du Solide - Driouich - Chapitre 1Fatima DahbiPas encore d'évaluation
- 1 DS de Statique Graphique Et Analytique - PelleteuseDocument4 pages1 DS de Statique Graphique Et Analytique - PelleteuseMohamed NaciriPas encore d'évaluation
- Rappel Sur Le Calcul VectorielDocument11 pagesRappel Sur Le Calcul Vectorielamine milanoPas encore d'évaluation
- DDL 2 Manipulateur À D'un Bra Linéaire - Commande Non: 2 TP. N°Document1 pageDDL 2 Manipulateur À D'un Bra Linéaire - Commande Non: 2 TP. N°مہۣۗتہۣۗوآأضہۣۗع مہۣۗتہۣۗوآأضہۣۗعPas encore d'évaluation
- Al Geo DS 1Document2 pagesAl Geo DS 1Loundou ortegaPas encore d'évaluation
- CNC Si Psi 2015 CG PDFDocument19 pagesCNC Si Psi 2015 CG PDFOUSKRIPas encore d'évaluation
- DCN2 Poupee Mobile-CorrectionDocument4 pagesDCN2 Poupee Mobile-CorrectionAwadji drissPas encore d'évaluation
- Ar 7958440Document9 pagesAr 7958440Aouari issamPas encore d'évaluation
- TD MEF 2021 - Série 1Document10 pagesTD MEF 2021 - Série 1Naima NaPas encore d'évaluation
- Mat2023 Fiche Td0Document1 pageMat2023 Fiche Td0KamPas encore d'évaluation
- Td+correction EnpuDocument27 pagesTd+correction EnpuChristian100% (1)
- Devoir Surveille N°1 1ere D Et TD 2022-2023Document4 pagesDevoir Surveille N°1 1ere D Et TD 2022-2023YVESPas encore d'évaluation
- Devoir de Contrôle N°3 - Math - Bac Math (2010-2011) MR AzaiezDocument2 pagesDevoir de Contrôle N°3 - Math - Bac Math (2010-2011) MR AzaiezGogo100% (1)
- TD 05 Angles Orientes-Trigo 1S1 LfselDocument6 pagesTD 05 Angles Orientes-Trigo 1S1 Lfseliamacteur34Pas encore d'évaluation
- Null 1Document4 pagesNull 1Omar SissouanePas encore d'évaluation
- 7résum 2 ÉlectromagnétismeDocument2 pages7résum 2 Électromagnétismeop.shanks.1995Pas encore d'évaluation
- Mathematiques 1ere D, Premier Devoir Du Premier Semestre 2022-2023 Ceg 1 IkpinleDocument2 pagesMathematiques 1ere D, Premier Devoir Du Premier Semestre 2022-2023 Ceg 1 IkpinleephraimPas encore d'évaluation
- Stats2vexos PDFDocument6 pagesStats2vexos PDFbombPas encore d'évaluation
- Examen Compil 2015 - CompressedDocument1 pageExamen Compil 2015 - CompressedABDELLAH ABDICHEPas encore d'évaluation
- Examen Mécanique de PointDocument9 pagesExamen Mécanique de PointMdzayd EL Fahime100% (1)
- 304 2Bm Nationaux Complexes 2007Ss1-2008Ss1Document3 pages304 2Bm Nationaux Complexes 2007Ss1-2008Ss1Hassan ElbahraouiPas encore d'évaluation
- Examen Normal Mécanique Du Point SMIA 2018 2019 VFcorrectionDocument8 pagesExamen Normal Mécanique Du Point SMIA 2018 2019 VFcorrectionRachif MesrarPas encore d'évaluation
- TD ElasticitéDocument19 pagesTD Elasticitéílyasse bouallagaPas encore d'évaluation
- Soluiton-TD2 Structure Machine 1 JijelDocument3 pagesSoluiton-TD2 Structure Machine 1 JijelLaeticia KacimiPas encore d'évaluation
- TD2 SaeDocument2 pagesTD2 SaeMed Djameleddine BougrinePas encore d'évaluation
- 1erec E4 CorrigéDocument2 pages1erec E4 Corrigéfranck kadjiPas encore d'évaluation
- Chapitre 1-Partie 1 - Formalisme Et Outils Mathã© MatiquesDocument16 pagesChapitre 1-Partie 1 - Formalisme Et Outils Mathã© MatiquesAbir BlPas encore d'évaluation
- Anum CompletDocument87 pagesAnum CompletMiDiPas encore d'évaluation
- Nombres Complexes 1 Serie D Exercices 1 2Document4 pagesNombres Complexes 1 Serie D Exercices 1 2bouhaliPas encore d'évaluation
- Série TD 1 Compléments Mathématiques Physique1Document7 pagesSérie TD 1 Compléments Mathématiques Physique1big bossPas encore d'évaluation
- Format Bac Série C 200327Document7 pagesFormat Bac Série C 200327Grevy YaoPas encore d'évaluation
- Ensembles Et Applications Serie D Exercices 1 PDFDocument5 pagesEnsembles Et Applications Serie D Exercices 1 PDFProfesseur de Mathématiques100% (1)
- Exam Algebre II 2010 11Document2 pagesExam Algebre II 2010 11pcfujitsu21Pas encore d'évaluation
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Chapitre 4 - Transistor en CommutationDocument4 pagesChapitre 4 - Transistor en CommutationSelma SenioritaPas encore d'évaluation
- Exercice Cordes VibrantesDocument3 pagesExercice Cordes VibrantesSelma SenioritaPas encore d'évaluation
- Chapitre 1 - Transformee en ZDocument16 pagesChapitre 1 - Transformee en ZSelma SenioritaPas encore d'évaluation
- Corrigé TD5Document13 pagesCorrigé TD5Selma SenioritaPas encore d'évaluation
- TP ELN S2 6 Oscillateur Pont de WienDocument8 pagesTP ELN S2 6 Oscillateur Pont de WienSelma SenioritaPas encore d'évaluation
- Chapitre 5-ComparateurDocument3 pagesChapitre 5-ComparateurSelma SenioritaPas encore d'évaluation
- Chap3CoursPhys3 PDFDocument2 pagesChap3CoursPhys3 PDFOmar BouledrouaPas encore d'évaluation
- Suite de CHP 2-1Document68 pagesSuite de CHP 2-1Selma SenioritaPas encore d'évaluation
- Cours Vibrations Complet 1 82 Ilovepdf CompressedDocument82 pagesCours Vibrations Complet 1 82 Ilovepdf CompressedSelma SenioritaPas encore d'évaluation
- Exam Antennes2017-18Document1 pageExam Antennes2017-18Selma SenioritaPas encore d'évaluation
- 2016 CST Chap 4 Corrigé Notes P121a123Document3 pages2016 CST Chap 4 Corrigé Notes P121a123Selma SenioritaPas encore d'évaluation
- 2019 Corr-1Document4 pages2019 Corr-1Selma SenioritaPas encore d'évaluation
- TD1 Algèbre 1 MI-L1Document5 pagesTD1 Algèbre 1 MI-L1Selma SenioritaPas encore d'évaluation
- TD6 Algèbre 1 MI-L1Document7 pagesTD6 Algèbre 1 MI-L1Selma SenioritaPas encore d'évaluation
- Matière: Informatique 1Document53 pagesMatière: Informatique 1Selma SenioritaPas encore d'évaluation
- Examen 1 Physique2 BejaiaDocument4 pagesExamen 1 Physique2 BejaiaSelma SenioritaPas encore d'évaluation
- Examen 2 Physique2 BejaiaDocument3 pagesExamen 2 Physique2 BejaiaSelma SenioritaPas encore d'évaluation
- Chapitre II - Les Erreurs de MesureDocument27 pagesChapitre II - Les Erreurs de MesureSelma SenioritaPas encore d'évaluation
- Systemes de Numerations: Chapitre 01: Système de NumérationsDocument7 pagesSystemes de Numerations: Chapitre 01: Système de NumérationsSelma SenioritaPas encore d'évaluation
- Cours Mecanique 3eme-1Document131 pagesCours Mecanique 3eme-1riadhPas encore d'évaluation
- 2020Document3 pages2020Selma SenioritaPas encore d'évaluation
- Série 1 - Erreurs de MesureDocument2 pagesSérie 1 - Erreurs de MesureSelma Seniorita100% (1)
- tp5 Frottement StatiqueDocument15 pagestp5 Frottement Statiquesayr0s50% (2)
- Exe Chaleur 3 Massique-CorDocument2 pagesExe Chaleur 3 Massique-CorSalah ForloulPas encore d'évaluation
- TD 1Document13 pagesTD 1Malick Diop100% (2)
- Info3 TD1 2020Document3 pagesInfo3 TD1 2020Selma SenioritaPas encore d'évaluation
- Série D'exercices N°8 - Génie Mécanique - Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanDocument1 pageSérie D'exercices N°8 - Génie Mécanique - Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanSelma SenioritaPas encore d'évaluation
- Guidage RotationDocument8 pagesGuidage RotationRouaissi RidhaPas encore d'évaluation
- Série D'exercices N°3 - Génie Mécanique - Cotation Fonctionnelle & Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanDocument1 pageSérie D'exercices N°3 - Génie Mécanique - Cotation Fonctionnelle & Dessin de Définition - Bac Technique (2019-2020) MR Ben Abdallah MarouanSelma Seniorita100% (3)
- Info3 TD1 2020Document3 pagesInfo3 TD1 2020Selma SenioritaPas encore d'évaluation
- BVM.303. GaiaDocument38 pagesBVM.303. GaiaadwawdPas encore d'évaluation
- Reins1 Sionneau Com PDFDocument13 pagesReins1 Sionneau Com PDFlexpoPas encore d'évaluation
- Convexite CoursDocument3 pagesConvexite CoursCédric VergneriePas encore d'évaluation
- Histoire Du MedicamentDocument10 pagesHistoire Du MedicamentEtiennePas encore d'évaluation
- Rapport CSPLA - Données Et Contenus Numériques PDFDocument131 pagesRapport CSPLA - Données Et Contenus Numériques PDFseti2016Pas encore d'évaluation
- Cours Milieux Poreux Et DispersésDocument23 pagesCours Milieux Poreux Et DispersésAbdallah abdellaoui91% (11)
- Politique Linguistique Et Toponymie Quel PDFDocument21 pagesPolitique Linguistique Et Toponymie Quel PDFMassa TebaniPas encore d'évaluation
- Physics Paper 2 HL SpanishDocument25 pagesPhysics Paper 2 HL SpanishLOPEZ MELENDEZ RODRIGO ANTONIOPas encore d'évaluation
- Modélisation Des SystèmesDocument7 pagesModélisation Des Systèmestenere comPas encore d'évaluation
- NICE RobusKit 600-2Vtx Notice SimplifieeDocument9 pagesNICE RobusKit 600-2Vtx Notice SimplifieexclPas encore d'évaluation
- L'expression "Historico-Critique " PDFDocument5 pagesL'expression "Historico-Critique " PDFJean-Paul Yves Le GoffPas encore d'évaluation
- Chemins de Traverse Essais de Sociologie (Khatibi)Document478 pagesChemins de Traverse Essais de Sociologie (Khatibi)faiz75% (4)
- Cours Gestion Des AT&MP Doc Stagiaire BI5 - 03&042022Document42 pagesCours Gestion Des AT&MP Doc Stagiaire BI5 - 03&042022science du futurPas encore d'évaluation
- LMU - Problèmes Macroéconomiques - TD 1 - Corrigé - Chapitre 1 PDFDocument12 pagesLMU - Problèmes Macroéconomiques - TD 1 - Corrigé - Chapitre 1 PDFAndy RAKOTOARISONPas encore d'évaluation
- 15ème Dimanche TOB 2021Document2 pages15ème Dimanche TOB 2021christian parfait yanda belingaPas encore d'évaluation
- 2 Observation Médicale Et Démarche en Médecine InterneDocument60 pages2 Observation Médicale Et Démarche en Médecine InterneDalmat LambertPas encore d'évaluation
- Effet Thérapeutique D'ailDocument252 pagesEffet Thérapeutique D'ailtasnime haninePas encore d'évaluation
- TD Stat Inférentielle - Loi NormaleDocument2 pagesTD Stat Inférentielle - Loi NormaleSalma SabwatPas encore d'évaluation
- Corrigé de L'exercice N° 1: Calcul Du Potentiel D'équilibre D'un IonDocument10 pagesCorrigé de L'exercice N° 1: Calcul Du Potentiel D'équilibre D'un IonSabo100% (1)
- La Fin Du MalDocument120 pagesLa Fin Du MalBruno Sauniere100% (2)
- TP 4 31 JanvierDocument5 pagesTP 4 31 JanvierNarimen BoudilmiPas encore d'évaluation
- Ch04 TP Salinite Titrage ConductimetriqueDocument1 pageCh04 TP Salinite Titrage Conductimetriquesylvain zuchiattiPas encore d'évaluation
- Ts 2Document9 pagesTs 2Ayman AssilaPas encore d'évaluation
- UE1 Comptabilité InternationaleDocument2 pagesUE1 Comptabilité Internationalefathia100% (1)
- Ba00444cfr 2721Document176 pagesBa00444cfr 2721hassanPas encore d'évaluation
- Les Embrayages1Document14 pagesLes Embrayages1Ghayth BouzayaniPas encore d'évaluation
- De Moïse À Hiram: Bernard MarquierDocument20 pagesDe Moïse À Hiram: Bernard MarquierDanMarniaPas encore d'évaluation
- Guide Sante Janv 2019Document52 pagesGuide Sante Janv 2019Thomas AbadPas encore d'évaluation
- NAT-1reG D5SpectroscopieIR PDFDocument10 pagesNAT-1reG D5SpectroscopieIR PDFYõůsřà LõlaPas encore d'évaluation
- Master I - Gestion de Projets - Seance 1B PDFDocument27 pagesMaster I - Gestion de Projets - Seance 1B PDFSarah ManouPas encore d'évaluation