Vous aimerez peut-être aussi
- TPE HydrauliqueDocument16 pagesTPE HydrauliquemotezbenmadhiPas encore d'évaluation
- Pelle Chargeuse RapportDocument25 pagesPelle Chargeuse RapportPatricia KengnePas encore d'évaluation
- Rapport 1Document10 pagesRapport 1rocceli nzoulouPas encore d'évaluation
- Pfe GM 0266Document67 pagesPfe GM 0266Walid SouidPas encore d'évaluation
- Cours MMFDocument37 pagesCours MMFIb SoulamaPas encore d'évaluation
- 9433269Document10 pages9433269AyoubPas encore d'évaluation
- Support de Cours - CompressDocument39 pagesSupport de Cours - Compressdaverni bourobou kombilaPas encore d'évaluation
- Élévateur A GodetsDocument6 pagesÉlévateur A GodetsSliim AmiriPas encore d'évaluation
- Verins PDFDocument28 pagesVerins PDFMalek BenBouYahiaPas encore d'évaluation
- CHAPITER I Vue Générale Sur Le Top DriveDocument18 pagesCHAPITER I Vue Générale Sur Le Top DriveHichem Nhh100% (4)
- Système HydrauliqueDocument10 pagesSystème Hydrauliquerocceli nzoulouPas encore d'évaluation
- PFE FinalDocument82 pagesPFE FinalfoufouaPas encore d'évaluation
- PelleDocument3 pagesPelletpjPas encore d'évaluation
- Hebbal Touaghzit Harkati) PDFDocument67 pagesHebbal Touaghzit Harkati) PDFAhmedMidouBentalebPas encore d'évaluation
- Cours Machines HydrauliquesDocument52 pagesCours Machines HydrauliquesDédé KambalaPas encore d'évaluation
- Expose Kra EssiDocument32 pagesExpose Kra EssibeugrePas encore d'évaluation
- Travail Autonomme 1920-1924Document15 pagesTravail Autonomme 1920-1924Medlemin TfeilPas encore d'évaluation
- cours hydraulique cours 202Document28 pagescours hydraulique cours 202Ossama BuitaPas encore d'évaluation
- Pompe FFFDocument12 pagesPompe FFFفتحيPas encore d'évaluation
- HydrauliqueDocument40 pagesHydrauliqueBibo Bahri100% (7)
- Module DDocument31 pagesModule Daxell samaPas encore d'évaluation
- HHHHHH OdtDocument8 pagesHHHHHH OdtMzn LyesPas encore d'évaluation
- TP Turbomachines1Document12 pagesTP Turbomachines1boubadja mohamed100% (3)
- Expo HydroDocument36 pagesExpo HydroArlPas encore d'évaluation
- Chapitre 1Document11 pagesChapitre 1Anwar BrahamPas encore d'évaluation
- Cours Sur Les Stations de PompageDocument98 pagesCours Sur Les Stations de PompageFhubvrf ChhvvyfrPas encore d'évaluation
- Manual instruction-FR PDFDocument28 pagesManual instruction-FR PDFItaba EdmondPas encore d'évaluation
- Ecole Superieure Polytechnique Rapport DDocument18 pagesEcole Superieure Polytechnique Rapport DHamza RimiPas encore d'évaluation
- Rapport BureauDocument39 pagesRapport BureauAbdou AarabPas encore d'évaluation
- IntroductionDocument34 pagesIntroductionAhmed KhalilPas encore d'évaluation
- Sami Bellalah Chapitre I Generalites SurDocument3 pagesSami Bellalah Chapitre I Generalites SurJonas Giv MpakaPas encore d'évaluation
- Les Relevages Hydrauliques Des Tracteurs AgricolesDocument14 pagesLes Relevages Hydrauliques Des Tracteurs Agricolesjeanbenoit015100% (9)
- Étude de Boit Vitesse de Tour VerticalDocument11 pagesÉtude de Boit Vitesse de Tour Verticalilyas aliPas encore d'évaluation
- Chapitre 1 Les Circuits de Transport de LiquideDocument13 pagesChapitre 1 Les Circuits de Transport de Liquidemohamed_amri100100% (1)
- app8-TAPIS DE COURSEDocument12 pagesapp8-TAPIS DE COURSEfaroukPas encore d'évaluation
- Rapport Fin CricDocument17 pagesRapport Fin CricSoufianePas encore d'évaluation
- Equipement AgricoleDocument85 pagesEquipement AgricoleCat gamerPas encore d'évaluation
- Mini Projet - MEI92Document10 pagesMini Projet - MEI92Ilyes KhelifiPas encore d'évaluation
- Tpe Machine Hyd - Copie FinaleDocument22 pagesTpe Machine Hyd - Copie FinalemotezbenmadhiPas encore d'évaluation
- Chapitre 1 FINAL - 2Document22 pagesChapitre 1 FINAL - 2Nacer Lagraa100% (3)
- Devoir N°3 Manipulateur de Tubes en Béton2022Document18 pagesDevoir N°3 Manipulateur de Tubes en Béton2022Lahoucine AgmaratPas encore d'évaluation
- Résume Tracteur Agricole 1Document92 pagesRésume Tracteur Agricole 1Sy RiÑe Ha MdiPas encore d'évaluation
- Chapitre 3 - LES VERINS PNEUMATIQUESDocument15 pagesChapitre 3 - LES VERINS PNEUMATIQUESMuhammad BneijaraPas encore d'évaluation
- Technologie Des Équipements HydrauliquesDocument34 pagesTechnologie Des Équipements HydrauliquesWalid BenaziPas encore d'évaluation
- Cours Snubbing FRDocument76 pagesCours Snubbing FRFraine Youcef100% (5)
- Nouveau Microsoft Word DocumentDocument21 pagesNouveau Microsoft Word DocumentAchref ChaabaniPas encore d'évaluation
- Cours HydrauliqueDocument78 pagesCours HydrauliquelatifaerraidyPas encore d'évaluation
- Chapitre 1 Les Circuits de Transport de LiquideDocument13 pagesChapitre 1 Les Circuits de Transport de LiquideBalloukPas encore d'évaluation
- TP01 Et 02 HadjelDocument21 pagesTP01 Et 02 Hadjelberberi badreddinePas encore d'évaluation
- 1 Generalites Sur HydrauliqueDocument3 pages1 Generalites Sur HydrauliqueMelek FrikhaPas encore d'évaluation
- Projet Fin de Cycle PDFDocument16 pagesProjet Fin de Cycle PDFMohammed dhiaeddin SaciPas encore d'évaluation
- Cours Notions Générales Sur Les TurbomachinesDocument8 pagesCours Notions Générales Sur Les TurbomachinesNassima HamaidiPas encore d'évaluation
- Cours D'hydrauliqueDocument33 pagesCours D'hydrauliqueSteph Akys80% (5)
- Théorie et pratique du treuil: Treuils fixes et mobilesD'EverandThéorie et pratique du treuil: Treuils fixes et mobilesPas encore d'évaluation
- Comment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesD'EverandComment construire son drone de zéro: Comment construire son drone et dimensionner les différentes partiesÉvaluation : 2 sur 5 étoiles2/5 (1)
- Photovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVD'EverandPhotovoltaïque | pas à pas: Le guide pratique pour débutants pour la conception d'une installation PVPas encore d'évaluation
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- TD3 2011 CorrigeDocument8 pagesTD3 2011 CorrigemotezbenmadhiPas encore d'évaluation
- Tpe Etude Des StructuresDocument33 pagesTpe Etude Des StructuresmotezbenmadhiPas encore d'évaluation
- Tpe Etude Des StructuresDocument33 pagesTpe Etude Des StructuresmotezbenmadhiPas encore d'évaluation
- TP3-MECA2-Pliage Des Tôles 2020 EADDocument4 pagesTP3-MECA2-Pliage Des Tôles 2020 EADmotezbenmadhiPas encore d'évaluation
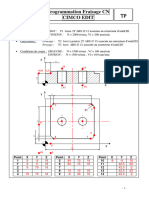
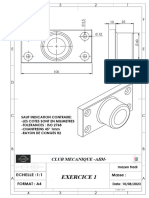
- CIMCO Fajkknuc Fraisage-EnimDocument2 pagesCIMCO Fajkknuc Fraisage-EnimmotezbenmadhiPas encore d'évaluation
- Formation Solidworks - 1Document7 pagesFormation Solidworks - 1motezbenmadhiPas encore d'évaluation
- Notice Tracteur LT130Document80 pagesNotice Tracteur LT130Jean-Paul ArtisPas encore d'évaluation
- Accouple MentDocument8 pagesAccouple MentNabil Ait BrahimPas encore d'évaluation
- Alain Rapport de Stage INPPDocument26 pagesAlain Rapport de Stage INPPDieu-merci KazadiPas encore d'évaluation
- Exercices-Alternateurs TriphasésS2Document3 pagesExercices-Alternateurs TriphasésS2Birame Mbodj100% (4)
- Baudouin DK Piece RechangeDocument29 pagesBaudouin DK Piece RechangeIonutChioveanuPas encore d'évaluation
- 06 RH-200 Circuit LogicDocument27 pages06 RH-200 Circuit Logicmedkh0411Pas encore d'évaluation
- Séq 01 - TP2 Réducteur Roue Et Vis Sans Fin Idem Bts 2 Séq 10Document6 pagesSéq 01 - TP2 Réducteur Roue Et Vis Sans Fin Idem Bts 2 Séq 10abdelhakim kheloufiPas encore d'évaluation
- TD Coupe TubeDocument6 pagesTD Coupe TubeSimo StitPas encore d'évaluation
- CT EP16 V10 Dimensionnement Systemes EntrainementsDocument6 pagesCT EP16 V10 Dimensionnement Systemes EntrainementsMarvel EvradPas encore d'évaluation
- AMDECDocument14 pagesAMDECayat50% (2)
- Poly TD API PDFDocument10 pagesPoly TD API PDFKhadija HajadePas encore d'évaluation
- Presentation Turbo-Machines-Definitif Turbone À GazDocument65 pagesPresentation Turbo-Machines-Definitif Turbone À GazHamdi Mohamed100% (1)
- EFM M21 - Montage de Circuits Pneumatiques Var1Document4 pagesEFM M21 - Montage de Circuits Pneumatiques Var1Younes ElguendouzPas encore d'évaluation
- Sujet VeloDocument10 pagesSujet VeloKhaled SouaissaPas encore d'évaluation
- Chariots Élévateurs À FourcheDocument3 pagesChariots Élévateurs À FourchetighzertPas encore d'évaluation
- Caractéristiques: GénéralitésDocument28 pagesCaractéristiques: GénéralitésmawoussiborisPas encore d'évaluation
- Cours MP M2EN Chap 4 (Partie 1)Document42 pagesCours MP M2EN Chap 4 (Partie 1)HadjaidjiPas encore d'évaluation
- Alimentation Et InjectionDocument14 pagesAlimentation Et InjectionabdouPas encore d'évaluation
- Hypothèses À Émettre Pour La Recherche de Pannes Sur Véhicule DieselDocument1 pageHypothèses À Émettre Pour La Recherche de Pannes Sur Véhicule Dieselexpert diag autoPas encore d'évaluation
- LPR - Urbi-2l (1099u2l101332018) PDFDocument165 pagesLPR - Urbi-2l (1099u2l101332018) PDFAIT0% (1)
- Cours Ludique en Couleur Sur Le Diesel Marin Yanmar Et VolvoDocument44 pagesCours Ludique en Couleur Sur Le Diesel Marin Yanmar Et Volvoaba diawPas encore d'évaluation
- Volvo Penta KAD32 Service Manual - Admission Echappement ReroidissementDocument56 pagesVolvo Penta KAD32 Service Manual - Admission Echappement ReroidissementGregory PAULPas encore d'évaluation
- Correction dc2 1as 2022Document3 pagesCorrection dc2 1as 2022Karim AmmiPas encore d'évaluation
- RTA Audi A3 Diesel AutovoltDocument25 pagesRTA Audi A3 Diesel Autovoltjulia100% (1)
- Chapitre IIIDocument7 pagesChapitre IIIkituturamazaniPas encore d'évaluation
- Top Control Valves Questions Et Réponses À Choix Multiples (QCM)Document13 pagesTop Control Valves Questions Et Réponses À Choix Multiples (QCM)Ted MatsoumaPas encore d'évaluation
- CCT G Equipement V 3Document97 pagesCCT G Equipement V 3Lamine AminePas encore d'évaluation
- Central Roca N 6771zeDocument15 pagesCentral Roca N 6771zeramepiePas encore d'évaluation
- B9 - Contacteurs de Forte Puissance - FR (Web)Document110 pagesB9 - Contacteurs de Forte Puissance - FR (Web)Ismail ZarganiPas encore d'évaluation
- Theorie Des MecanismesDocument20 pagesTheorie Des Mecanismesebey_endunPas encore d'évaluation