Vous aimerez peut-être aussi
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Rapport AlamiDocument17 pagesRapport AlamiMohamed HilmiPas encore d'évaluation
- CR.2 Machine ElectriqueDocument6 pagesCR.2 Machine ElectriqueAl khalifa TALLPas encore d'évaluation
- La Machine Asynchrone Monophasée (TP N°3 " Usthb ")Document12 pagesLa Machine Asynchrone Monophasée (TP N°3 " Usthb ")laperouse2008100% (16)
- TDN°1 Commande Des Machines ElectriquesDocument8 pagesTDN°1 Commande Des Machines ElectriquesHamid OUTZGUINRIMT100% (1)
- Machine À Courant ÉléctriqueDocument21 pagesMachine À Courant ÉléctriqueYounesHamoudi100% (1)
- TP 1Document6 pagesTP 1Mira BkhPas encore d'évaluation
- Moteur A Courant ContinuDocument79 pagesMoteur A Courant ContinuNejib JallouliPas encore d'évaluation
- TP2 Machine Sychrone Couple Au Reseau InfinieDocument8 pagesTP2 Machine Sychrone Couple Au Reseau Infinieharzallah khaled50% (2)
- CR.2 Machine ElectriqueDocument5 pagesCR.2 Machine ElectriqueAl khalifa TALLPas encore d'évaluation
- DS1 - 2020 2021 1Document7 pagesDS1 - 2020 2021 1Deku AbdssamadPas encore d'évaluation
- TP 01Document19 pagesTP 01tete200414Pas encore d'évaluation
- TD MCCDocument4 pagesTD MCCIsmail ElfaPas encore d'évaluation
- CR TPDocument14 pagesCR TPZoratoon OlPas encore d'évaluation
- Cours Electromecanique MiniereDocument11 pagesCours Electromecanique MinieresouhaboumarafPas encore d'évaluation
- TP CommandeDocument6 pagesTP Commandevan picaboPas encore d'évaluation
- TP Moteur ShuntDocument10 pagesTP Moteur ShuntYoucef SouidiPas encore d'évaluation
- TD10Document2 pagesTD10alaeeddinemesrar3Pas encore d'évaluation
- Les Machines À Courant ContinuDocument3 pagesLes Machines À Courant ContinuMartinien YawoloPas encore d'évaluation
- TP 2Document9 pagesTP 2salmabellakhyaletPas encore d'évaluation
- Exercices CorrigésDocument26 pagesExercices CorrigésSara Shamsse86% (21)
- Exercices Corrigés Leçon VIDocument18 pagesExercices Corrigés Leçon VIAhmed MallekhPas encore d'évaluation
- TP N01:Machine Synchron A Mode Moteur: Ministère de L'Enseignement Supérieur Et de La Recherche ScientifiqueDocument11 pagesTP N01:Machine Synchron A Mode Moteur: Ministère de L'Enseignement Supérieur Et de La Recherche Scientifiqueأيمن ادريباتPas encore d'évaluation
- Moteur SynchroneDocument11 pagesMoteur SynchroneAhmed MidoPas encore d'évaluation
- 5.cours MCCDocument29 pages5.cours MCCmajdoubPas encore d'évaluation
- Compte Rendu N1 (Moteur Electrique)Document22 pagesCompte Rendu N1 (Moteur Electrique)Khalil homraniPas encore d'évaluation
- cours-MASDocument12 pagescours-MASfouadPas encore d'évaluation
- Exo MCC Gene RauxDocument5 pagesExo MCC Gene RauxernoPas encore d'évaluation
- TP2-Association moteur-courant-continu-redressement-PD3Document7 pagesTP2-Association moteur-courant-continu-redressement-PD3You Cef100% (1)
- Tp3 Mas CaractDocument5 pagesTp3 Mas CaractDaly ZeddiniPas encore d'évaluation
- MCCDocument8 pagesMCCAyoub JoubixPas encore d'évaluation
- Fonction Convertir Actionneur Électrique N.L.techNIQUE PROF S.charIDocument6 pagesFonction Convertir Actionneur Électrique N.L.techNIQUE PROF S.charIAymen HssainiPas encore d'évaluation
- Exercice N°1: Moteur Courant Continu À Excitation IndépendanteDocument4 pagesExercice N°1: Moteur Courant Continu À Excitation Indépendantesaid houairiPas encore d'évaluation
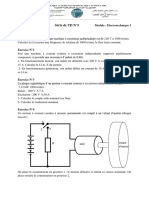
- Série de TD N°5: Module: Electrotechnique 1Document2 pagesSérie de TD N°5: Module: Electrotechnique 1Maguette SeckPas encore d'évaluation
- Commande MCCDocument20 pagesCommande MCCMoez YoussefPas encore d'évaluation
- Cours Machine AsynchroneDocument28 pagesCours Machine AsynchroneMeryem El MennaouyPas encore d'évaluation
- td1 Machine A Courant ContinuDocument6 pagestd1 Machine A Courant ContinuTchapdie BrisPas encore d'évaluation
- TP2 MCCDocument8 pagesTP2 MCCsafouanoPas encore d'évaluation
- Ass Mach Conv 1erchpDocument11 pagesAss Mach Conv 1erchpamine milanoPas encore d'évaluation
- Convertir Machine AsynchroneDocument5 pagesConvertir Machine AsynchroneBALLOUK SoufianePas encore d'évaluation
- Mouteur DCDocument7 pagesMouteur DCElmokh LassaadPas encore d'évaluation
- Cours Machines AsynchronesDocument53 pagesCours Machines Asynchronesminoungou constantPas encore d'évaluation
- TD7 Machine À Courant ContinuDocument2 pagesTD7 Machine À Courant Continuabdelhadi elkhyatPas encore d'évaluation
- Machines À Courant Continu-2Document42 pagesMachines À Courant Continu-2cmpf0021Pas encore d'évaluation
- 2F.C22 - Machine À Courant ContinuDocument5 pages2F.C22 - Machine À Courant ContinuUmar MuhammetPas encore d'évaluation
- Exos MCCDocument11 pagesExos MCCAyoub HallaPas encore d'évaluation
- Serie Dexercice1Document7 pagesSerie Dexercice1miss khanPas encore d'évaluation
- Cours - Electricite - Moteur Asynchrone - Terminale StiDocument11 pagesCours - Electricite - Moteur Asynchrone - Terminale StiAissam EssanhajiPas encore d'évaluation
- Cours - Machines - Asynchrones MODELISATIONDocument53 pagesCours - Machines - Asynchrones MODELISATIONtamsirniangPas encore d'évaluation
- TP2: Paramètres Du Schéma Équivalent de La Machine AsynchroneDocument9 pagesTP2: Paramètres Du Schéma Équivalent de La Machine AsynchroneFar Idd agPas encore d'évaluation
- TP ElectrotechniqueDocument29 pagesTP ElectrotechniqueMihoubi OmarPas encore d'évaluation
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Soutenance PFE Fini-444Document26 pagesSoutenance PFE Fini-444Yassine Chaachoue100% (1)
- TP 1 - R Non CommandeDocument12 pagesTP 1 - R Non CommandeMohamed HilmiPas encore d'évaluation
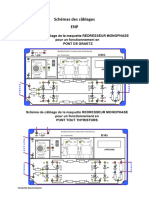
- Schémas Des Câblages ENPDocument2 pagesSchémas Des Câblages ENPMohamed HilmiPas encore d'évaluation
- Compte Rendu TP Hacheur OnduleurDocument6 pagesCompte Rendu TP Hacheur Onduleurbouchaoui yassinePas encore d'évaluation
- TP 1 - Redressement Non CommandeDocument9 pagesTP 1 - Redressement Non CommandeMohamed HilmiPas encore d'évaluation
- Achouri Amira NouhaDocument135 pagesAchouri Amira NouhaEmmanuel AvegnonPas encore d'évaluation
- Rapport de Stage Complete Sur La Gestion Des Opérations de CréditDocument44 pagesRapport de Stage Complete Sur La Gestion Des Opérations de Créditrogerkom.profsPas encore d'évaluation
- Rouleaux PACK - VRACDocument54 pagesRouleaux PACK - VRACZaarad ZakariaPas encore d'évaluation
- Sup de Cours Education Et InstructionDocument7 pagesSup de Cours Education Et InstructionRolfo FlrPas encore d'évaluation
- SwingDocument33 pagesSwingKarim KarimPas encore d'évaluation
- Achat Et AaproDocument33 pagesAchat Et AaproOualid BelbrikPas encore d'évaluation
- Echafaudages en Sécurité Montage Et Démontage: Suva, Secteur Génie Civil Et BâtimentDocument47 pagesEchafaudages en Sécurité Montage Et Démontage: Suva, Secteur Génie Civil Et BâtimentZirig ChafikPas encore d'évaluation
- Traité de Psychopathologie de L'adulte - Narcissisme Et Dépression by Catherine ChabertDocument440 pagesTraité de Psychopathologie de L'adulte - Narcissisme Et Dépression by Catherine ChabertFrank Eric Ciatchoua Ngoundjo100% (7)
- Présentation Leader 2Document14 pagesPrésentation Leader 2Rosine PergamentPas encore d'évaluation
- F Bakini, M Touzani, S JerbiDocument26 pagesF Bakini, M Touzani, S JerbiMălina-Ionela CorlătianuPas encore d'évaluation
- Processeur M MoireDocument66 pagesProcesseur M Moiresayedyoussef390Pas encore d'évaluation
- Bibliographie Stress Au Travail 2017-10-27Document15 pagesBibliographie Stress Au Travail 2017-10-27mael bikoroPas encore d'évaluation
- Une Biodiversité MenacéeDocument1 pageUne Biodiversité Menacéeniu sauPas encore d'évaluation
- 3sc ds1Document44 pages3sc ds1wala.ayhemPas encore d'évaluation
- Gestion Budgétaire: Contrôle BudgetaireDocument25 pagesGestion Budgétaire: Contrôle BudgetaireKhansaa HaroudPas encore d'évaluation
- Epreuve E41 Bts Elec 2019 SujetDocument21 pagesEpreuve E41 Bts Elec 2019 Sujetoussama houariPas encore d'évaluation
- Personal SkillsDocument11 pagesPersonal SkillsAgathe GrenonPas encore d'évaluation
- Consignes Leadership-Seance 1 - DefinitionDocument1 pageConsignes Leadership-Seance 1 - DefinitionAmadou BarryPas encore d'évaluation
- Les Mille Visages de L IndianOceanieDocument110 pagesLes Mille Visages de L IndianOceanieAli Abbas100% (1)
- Chapitre07.eurocode 8 PDFDocument11 pagesChapitre07.eurocode 8 PDFMohamed HaykelPas encore d'évaluation
- Organisation Fonctionnelle D'un ProduitDocument2 pagesOrganisation Fonctionnelle D'un ProduitMIMFSPas encore d'évaluation
- EB2-Epreuve1 Production de L'ecritDocument2 pagesEB2-Epreuve1 Production de L'ecritElissa Naalaband100% (1)
- Theme 2 Le Vivant Sa Diversite Et Les Fonctions Qui Le Caracterisent ProgrammeDocument5 pagesTheme 2 Le Vivant Sa Diversite Et Les Fonctions Qui Le Caracterisent ProgrammeAmine AminePas encore d'évaluation
- Energie EolienneDocument51 pagesEnergie Eoliennedalila AMMARPas encore d'évaluation
- Le Labfab de Rennes 2012-2013: DiaporamaDocument14 pagesLe Labfab de Rennes 2012-2013: DiaporamalabfabfrPas encore d'évaluation
- التمدد الحضري و الحراك التنقلي في النطاق الحضري لمدينة سطيفDocument11 pagesالتمدد الحضري و الحراك التنقلي في النطاق الحضري لمدينة سطيفhoulahilaPas encore d'évaluation
- Samuel Blaser, Marc Ducret - JazzdorDocument2 pagesSamuel Blaser, Marc Ducret - JazzdorolocesPas encore d'évaluation
- Symfony2 Un Tutoriel Pour Debuter Avec Le Framework Symfony2Document200 pagesSymfony2 Un Tutoriel Pour Debuter Avec Le Framework Symfony2Bryan Fury JimmyPas encore d'évaluation
- T 7h2uw 2022 1Document1 pageT 7h2uw 2022 1MamPas encore d'évaluation
- Etude Des Mecanismes de Levage Et de Direction D'Un Pont RoulantDocument59 pagesEtude Des Mecanismes de Levage Et de Direction D'Un Pont Roulantamzal boudjmaamoundherPas encore d'évaluation