Vous aimerez peut-être aussi
- 1 Cours Rotation D'un Solide Autour D'un Axe Fixe PDFDocument2 pages1 Cours Rotation D'un Solide Autour D'un Axe Fixe PDFAzizElheni100% (7)
- Cinematique. CH 1. - Position D Un Solide. Etude Geometrique D Un SystemeDocument30 pagesCinematique. CH 1. - Position D Un Solide. Etude Geometrique D Un SystemeMariam DaaliPas encore d'évaluation
- Cours RDM 6 PDFDocument7 pagesCours RDM 6 PDFJeudi VeritéPas encore d'évaluation
- Cours La Rotation 1bacfDocument5 pagesCours La Rotation 1bacfJihad ELPas encore d'évaluation
- Mouvement de Rotation D'un Corps SolideDocument34 pagesMouvement de Rotation D'un Corps SolidenourlalaPas encore d'évaluation
- Lecon Phy 1Document4 pagesLecon Phy 1Hua WeiPas encore d'évaluation
- Chapitre1 Leçon1 2Document15 pagesChapitre1 Leçon1 2Deku ShotoPas encore d'évaluation
- Cours Rotation D'un Solide Autour D'un Axe FixeDocument3 pagesCours Rotation D'un Solide Autour D'un Axe FixeAli OuchnPas encore d'évaluation
- Cour Mouvement de Rotation Autour D'un Axe FixeDocument7 pagesCour Mouvement de Rotation Autour D'un Axe FixelazrakPas encore d'évaluation
- Physique Cours 1 BAC BIOF WWW - Chtoukaphysique - 3Document35 pagesPhysique Cours 1 BAC BIOF WWW - Chtoukaphysique - 3Nourii Nour-dine0% (1)
- 3-Méca1-Forces Et MouvementDocument9 pages3-Méca1-Forces Et MouvementNPBO Nouvelle Prestation BureautiquePas encore d'évaluation
- PC1ere CD - P2 Travail Et Puissance Dans Le Cas de RotationDocument11 pagesPC1ere CD - P2 Travail Et Puissance Dans Le Cas de RotationEyambe TheodorePas encore d'évaluation
- 1-1-ROTATION D'un SolideDocument4 pages1-1-ROTATION D'un SolidesimoPas encore d'évaluation
- 01 Generalites Sur La Mecanique Du Solide IndeformableDocument24 pages01 Generalites Sur La Mecanique Du Solide IndeformablecherquiPas encore d'évaluation
- Mouvement de Rotation Dun Solide Indeformable Autour Dun Axe FixeDocument7 pagesMouvement de Rotation Dun Solide Indeformable Autour Dun Axe FixeOmar OutaharPas encore d'évaluation
- Cours Cinematique eDocument5 pagesCours Cinematique eLoic BastaraudPas encore d'évaluation
- Solide en Rotation CoursDocument4 pagesSolide en Rotation CoursMehdi BnmssdPas encore d'évaluation
- Physique Chapitre2 Mouvement SolideDocument5 pagesPhysique Chapitre2 Mouvement SolidephytanjaPas encore d'évaluation
- PR Ése Ntation 1Document21 pagesPR Ése Ntation 1Ettalbi SalmaPas encore d'évaluation
- Cinematique Du Point - CopieDocument3 pagesCinematique Du Point - CopieMahboub Sabir100% (1)
- Physique1 Chapitre 2Document18 pagesPhysique1 Chapitre 2potatoPas encore d'évaluation
- 1 - Mouvement de Rotation D'un Corps Solide FRDocument16 pages1 - Mouvement de Rotation D'un Corps Solide FRmomo ridjPas encore d'évaluation
- Physique D Chap12 Planetes - Et - Satellites PDFDocument6 pagesPhysique D Chap12 Planetes - Et - Satellites PDFbaderPas encore d'évaluation
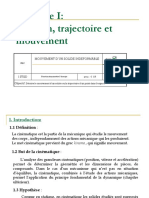
- Chapitre I TRAJ MVT VITDocument15 pagesChapitre I TRAJ MVT VITtanPas encore d'évaluation
- Torseurs: I. DéfinitionsDocument53 pagesTorseurs: I. DéfinitionsMeryem JabranePas encore d'évaluation
- ts-b-chap-n-3-mouvement-des-satellitesDocument6 pagests-b-chap-n-3-mouvement-des-satellitesmedabdellahisamba34Pas encore d'évaluation
- 1le-mouvement-de-rotation-d-un-solide-autour-d-un-axe-fixe-cours-1-2Document4 pages1le-mouvement-de-rotation-d-un-solide-autour-d-un-axe-fixe-cours-1-2taziadambkPas encore d'évaluation
- RotationDocument14 pagesRotationالغزيزال الحسن EL GHZIZAL Hassane100% (1)
- CHAP 6 CinématiqueDocument4 pagesCHAP 6 Cinématiquehepived840Pas encore d'évaluation
- Temps Et Cinematique Fiche de CoursDocument7 pagesTemps Et Cinematique Fiche de Coursd13jmPas encore d'évaluation
- Chapitre 1 - MécaniqueDocument14 pagesChapitre 1 - MécaniqueSakhir GayePas encore d'évaluation
- Cours de Cinématique Du Point Matériel Première S 2023-2024Document6 pagesCours de Cinématique Du Point Matériel Première S 2023-2024Daniel Datch Mefouet AbessoloPas encore d'évaluation
- RotationjmrDocument7 pagesRotationjmrNissrine ËlPas encore d'évaluation
- OscillationsDocument22 pagesOscillationscoucou garbiPas encore d'évaluation
- 6129d73280148travail Et Puissance Phy C Et DDocument7 pages6129d73280148travail Et Puissance Phy C Et DCamara layePas encore d'évaluation
- 1 - Mouvement de Rotation D'un Solide Indéformable Autour D'un Axe Fixe-résumé-FRDocument3 pages1 - Mouvement de Rotation D'un Solide Indéformable Autour D'un Axe Fixe-résumé-FROmar ait taleb aliPas encore d'évaluation
- Cinématique Du Solide - ExtraitDocument8 pagesCinématique Du Solide - ExtraitSékhou DiakitéPas encore d'évaluation
- TDMeca 1Document4 pagesTDMeca 1Ihsan Mokhlisse100% (1)
- Mouvement CirculaireDocument3 pagesMouvement CirculaireVictoria DoscaPas encore d'évaluation
- Cours Théorique de Physique 1ère CD + Amendement IPRDocument61 pagesCours Théorique de Physique 1ère CD + Amendement IPRFatahPas encore d'évaluation
- cinematique-du-point_fiche-de-coursDocument26 pagescinematique-du-point_fiche-de-coursphilPas encore d'évaluation
- Chapitre1 P22 GEGMDocument64 pagesChapitre1 P22 GEGMRajaa ZouichaPas encore d'évaluation
- Mouvement de Rotation D Un Solide Autour D Un Axe Fixe Resume de Cours 1 1Document2 pagesMouvement de Rotation D Un Solide Autour D Un Axe Fixe Resume de Cours 1 1najiPas encore d'évaluation
- Chimie ActivitesDocument12 pagesChimie ActivitesEl Youbi MohammedPas encore d'évaluation
- TDsMECA2011 SCIDocument33 pagesTDsMECA2011 SCIHussel DonkengPas encore d'évaluation
- TD 1Document4 pagesTD 1Ahmed Hassan Hamid HamidPas encore d'évaluation
- solide en mouvement de rotation-3-5Document3 pagessolide en mouvement de rotation-3-5mcrms2010Pas encore d'évaluation
- Cinematique Du Point CorrectionDocument8 pagesCinematique Du Point CorrectionMohieddine Khaili100% (1)
- 8 Lois Newton Mouvement Circulaires UniformesDocument20 pages8 Lois Newton Mouvement Circulaires UniformesMilliardaire RüssëPas encore d'évaluation
- Partie 7Document6 pagesPartie 7Naoual39Pas encore d'évaluation
- 121.04 - Cours - Les Mouvements de RotationDocument3 pages121.04 - Cours - Les Mouvements de RotationRamzi MansouriPas encore d'évaluation
- 02 - Cinématique 2Document14 pages02 - Cinématique 2Keziah MustunPas encore d'évaluation
- Cours Cinematik 2016 2017Document14 pagesCours Cinematik 2016 2017Aida Mbodji0% (1)
- TD N - 3 CinematiqueDocument7 pagesTD N - 3 CinematiqueHamza OubrahimPas encore d'évaluation
- Physique Chapitre 2Document47 pagesPhysique Chapitre 2Hamsik HamsikPas encore d'évaluation
- COURS-P1-GENERALITES MOUVEMENT - 2nde S - NOVEMBRE 2021 - PPDocument30 pagesCOURS-P1-GENERALITES MOUVEMENT - 2nde S - NOVEMBRE 2021 - PPdieme100% (1)
- Cinematique 1Document4 pagesCinematique 1imaha92Pas encore d'évaluation
- Leçons de cosmographie à l'usage des lycées et collèges: Ainsi que de tous les établissements d'instruction publiqueD'EverandLeçons de cosmographie à l'usage des lycées et collèges: Ainsi que de tous les établissements d'instruction publiquePas encore d'évaluation
- 1 - Leçon de DécoupageDocument10 pages1 - Leçon de DécoupageHamada HamadaPas encore d'évaluation
- Calcul de Longueurs DéveloppéesDocument4 pagesCalcul de Longueurs DéveloppéesChadi AbdelazizPas encore d'évaluation
- Le Cintrage Des TôlesDocument6 pagesLe Cintrage Des TôlesChadi AbdelazizPas encore d'évaluation
- Soud AgeDocument4 pagesSoud AgeChadi AbdelazizPas encore d'évaluation
- La Leçon Sur Le Pliage Des TôlesDocument5 pagesLa Leçon Sur Le Pliage Des TôlesChadi AbdelazizPas encore d'évaluation
- Dimensionnement EscalierDocument3 pagesDimensionnement EscaliersalifsyPas encore d'évaluation
- Eota TR045Document17 pagesEota TR045Sofian30Pas encore d'évaluation
- Corrige Ds1Document4 pagesCorrige Ds1rachid kouisPas encore d'évaluation
- Electrocinetique Regime Sinusoidal Force PDFDocument7 pagesElectrocinetique Regime Sinusoidal Force PDFDjawad Abi AyadPas encore d'évaluation
- Cinematique PDFDocument8 pagesCinematique PDFguetardPas encore d'évaluation
- TD l2 Thermo Correc 2Document12 pagesTD l2 Thermo Correc 2Mohammed Amine MoussaouiPas encore d'évaluation
- Calcul Du Volume Utile 3Document65 pagesCalcul Du Volume Utile 3jack GNIMPas encore d'évaluation
- Support de Cours 2023Document115 pagesSupport de Cours 2023Al QuranPas encore d'évaluation
- Série 2 TD Thermodynamique AP2 2021 - 2022Document3 pagesSérie 2 TD Thermodynamique AP2 2021 - 2022Karima HamdanPas encore d'évaluation
- Chapitre 7 DÉFORMATION EN FLEXION DES POUTRESDocument34 pagesChapitre 7 DÉFORMATION EN FLEXION DES POUTRESSẵffǿủ Jặmếs100% (2)
- Pendule SimpleDocument18 pagesPendule SimplePablo Emilio100% (1)
- BLPC 219 53-67Document15 pagesBLPC 219 53-67khadimPas encore d'évaluation
- Estimation de La TempératureDocument109 pagesEstimation de La TempératureMohammed elaid BaybourPas encore d'évaluation
- CHP 3 Analyse Vibratoire 2020Document52 pagesCHP 3 Analyse Vibratoire 2020Maram Sellami100% (1)
- Page FacebookDocument5 pagesPage FacebookBazouanePas encore d'évaluation
- Moam - Info - Generalites Sur Les Systemes Asservis - 59d0806f1723ddd8863ffcca - 2Document6 pagesMoam - Info - Generalites Sur Les Systemes Asservis - 59d0806f1723ddd8863ffcca - 2Islam LakatPas encore d'évaluation
- Cours Hydraulique 82 La CompressibiliteDocument2 pagesCours Hydraulique 82 La CompressibiliteNestor ChiantsePas encore d'évaluation
- Série N°4. Changement de Référentiel - Composition Des Mouvements (SMAI1) 2020-21Document2 pagesSérie N°4. Changement de Référentiel - Composition Des Mouvements (SMAI1) 2020-21AHMED ES-SAHELYPas encore d'évaluation
- Physique A Chap2 Ondes - PeriodiquesDocument5 pagesPhysique A Chap2 Ondes - PeriodiquesIsmail ait talebPas encore d'évaluation
- Chap4 SMP5Document27 pagesChap4 SMP5Daoud El Caid100% (2)
- Solution de La Série de TD #01 Thermodynamique Des ÉquilibresDocument3 pagesSolution de La Série de TD #01 Thermodynamique Des ÉquilibresCherif LaifaPas encore d'évaluation
- Convection + ECHANGEURS Présentation1Document101 pagesConvection + ECHANGEURS Présentation1hana belkacemi100% (1)
- RakotondrabeTojonirinaJeanC ESPA MAST 19Document120 pagesRakotondrabeTojonirinaJeanC ESPA MAST 19Med ChePas encore d'évaluation
- Installation Guide CU4EB8 225205Document10 pagesInstallation Guide CU4EB8 225205ddcguy3190Pas encore d'évaluation
- Serie3exrecices 150508154405 Lva1 App6891Document1 pageSerie3exrecices 150508154405 Lva1 App6891Youssef EL MliliPas encore d'évaluation
- 01 Les Grandeurs SinusoidalesDocument19 pages01 Les Grandeurs SinusoidalesElias KaramPas encore d'évaluation
- TP 6 Etude Reducteur Train EpicycloidalDocument12 pagesTP 6 Etude Reducteur Train EpicycloidalLAALAIFAICELPas encore d'évaluation