Vous aimerez peut-être aussi
- TD Recherche OpérationnelleDocument11 pagesTD Recherche OpérationnelleLaurent Niore100% (1)
- Torsion (Parasismique)Document10 pagesTorsion (Parasismique)roma JamanPas encore d'évaluation
- Hyperstatisme Et Mobilité: Liaisons en ParallèleDocument11 pagesHyperstatisme Et Mobilité: Liaisons en ParallèleMohamed OuaggaPas encore d'évaluation
- NOTE CALCULS MUR RIDEAU-rev-1.1 PDFDocument7 pagesNOTE CALCULS MUR RIDEAU-rev-1.1 PDFNacer Izri100% (5)
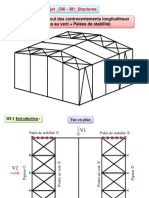
- Projet CM Contreventements LongitudinauxDocument16 pagesProjet CM Contreventements LongitudinauxAymen RahmouniPas encore d'évaluation
- Untitled 1Document2 pagesUntitled 1zhiwaPas encore d'évaluation
- 14 TD Sujet - Torseur Cinétique Et Torseur Dynamique PDFDocument5 pages14 TD Sujet - Torseur Cinétique Et Torseur Dynamique PDFHassanbfk BfkPas encore d'évaluation
- Etude de Coffrage Et de Ferraillage DesDocument71 pagesEtude de Coffrage Et de Ferraillage DesaminPas encore d'évaluation
- Chap5 - Compression CentréeDocument32 pagesChap5 - Compression CentréesahbiPas encore d'évaluation
- Exii 2Document3 pagesExii 2Narjiss ShimiPas encore d'évaluation
- Résumé Avec Exercices - Robotique Industrielle 2021-Partie 01Document5 pagesRésumé Avec Exercices - Robotique Industrielle 2021-Partie 01FAWZI RONALDOPas encore d'évaluation
- Klubprepa Extrait 4758Document4 pagesKlubprepa Extrait 4758Mimita LafleurPas encore d'évaluation
- Chapitre 6 - Mesure Et Contrôle Des FiletagesDocument12 pagesChapitre 6 - Mesure Et Contrôle Des FiletagesGOUAL SaraPas encore d'évaluation
- Rattrapage Année 2001-2002Document2 pagesRattrapage Année 2001-2002mimaPas encore d'évaluation
- Pliage 2eme AnnéeDocument16 pagesPliage 2eme AnnéeAlix BoubanPas encore d'évaluation
- Compte Rendu de TP de Lignes TP N°4: Ligne en Régime TransitoireDocument12 pagesCompte Rendu de TP de Lignes TP N°4: Ligne en Régime TransitoireZakaria ZinePas encore d'évaluation
- Essai de TorsionDocument9 pagesEssai de Torsionlando de chance100% (1)
- TSI3 ModelisationDocument12 pagesTSI3 Modelisationlouna yunaPas encore d'évaluation
- Asservissement D'un Robot ParallèleDocument10 pagesAsservissement D'un Robot ParallèlelaracorpPas encore d'évaluation
- Travaux Pratiques de Mécanique Et de Vibrations Et OndesDocument27 pagesTravaux Pratiques de Mécanique Et de Vibrations Et OndesMorgan merdaPas encore d'évaluation
- TD N°01 Action Mécanique CorrectionDocument7 pagesTD N°01 Action Mécanique CorrectionennajiPas encore d'évaluation
- App 107 03 EnonceDocument3 pagesApp 107 03 EnonceMeryem EL ADEKPas encore d'évaluation
- FCT TurbineDocument2 pagesFCT TurbinemouadPas encore d'évaluation
- CC1 - Calcul Des Structures 2017 - 2018Document2 pagesCC1 - Calcul Des Structures 2017 - 2018Aya ChikerPas encore d'évaluation
- Boîte de Vitesses (Cours)Document12 pagesBoîte de Vitesses (Cours)madanifateh1984Pas encore d'évaluation
- Moment Dinertie de MasseDocument10 pagesMoment Dinertie de MasseMOHAMED SEGNIDIPas encore d'évaluation
- TP TorsionDocument9 pagesTP TorsionYassine HamidiPas encore d'évaluation
- Devoir de Contrôle N°2 - Technologie - 1ère AS (2008-2009) Mme Toumi Imen Système Dispositif de Blocage de TubesDocument3 pagesDevoir de Contrôle N°2 - Technologie - 1ère AS (2008-2009) Mme Toumi Imen Système Dispositif de Blocage de TubesKhaled Aamira100% (1)
- TD1-Cinétique Des Solides 23-24Document6 pagesTD1-Cinétique Des Solides 23-24Imad NouniPas encore d'évaluation
- ExaM1 Janvier16Document4 pagesExaM1 Janvier16osa bazePas encore d'évaluation
- Chapitre 6 - La TorsionDocument19 pagesChapitre 6 - La TorsionBadr-eddineBounouPas encore d'évaluation
- 1 Robot Bi Articule Doc RessourceDocument10 pages1 Robot Bi Articule Doc Ressourceaes limemPas encore d'évaluation
- Trottinette Électrique 2Document4 pagesTrottinette Électrique 2Ced'RasoloarivonyPas encore d'évaluation
- DSMG00 04 17Document4 pagesDSMG00 04 17lamiabejaouiPas encore d'évaluation
- CoursTheorie Des MecanismesDocument18 pagesCoursTheorie Des Mecanismeshayet debbichPas encore d'évaluation
- CC1 - Calcul Des Structures 2019 - 2020Document2 pagesCC1 - Calcul Des Structures 2019 - 2020Aya ChikerPas encore d'évaluation
- 01TD1 1 Pince-TGV SynthèseDocument8 pages01TD1 1 Pince-TGV Synthèsettchhf40Pas encore d'évaluation
- Acier 2020 - Chap 2Document68 pagesAcier 2020 - Chap 2Jaouad SAYKOUKPas encore d'évaluation
- TP Deformation Des Poutres CourbesDocument5 pagesTP Deformation Des Poutres CourbesFarahBoughanmi100% (1)
- Laboratoire Mécanique de KorbaDocument15 pagesLaboratoire Mécanique de KorbaseddikmorabetPas encore d'évaluation
- DC3 4 SCT (10-11) Corr Cremaillère XDocument15 pagesDC3 4 SCT (10-11) Corr Cremaillère XWagih MrassiPas encore d'évaluation
- TD1à Préparer (Séance4) - 1Document5 pagesTD1à Préparer (Séance4) - 1Salma ES-SAFYPas encore d'évaluation
- 2sm Structures Exe Parti2 PDFDocument4 pages2sm Structures Exe Parti2 PDFHassan HassanPas encore d'évaluation
- Chap 2 Flambement Des Pieces CoprimeesDocument5 pagesChap 2 Flambement Des Pieces CoprimeesBast MklofyPas encore d'évaluation
- Ds 1 - spé-MP-RS - Nov - 20Document6 pagesDs 1 - spé-MP-RS - Nov - 20Nowe Ahmade0% (1)
- Sujet-Machine À VibrerDocument4 pagesSujet-Machine À Vibreryouneshajaj6Pas encore d'évaluation
- PTSI - TD Dynamique PDFDocument14 pagesPTSI - TD Dynamique PDFHassanbfk BfkPas encore d'évaluation
- RDM3 Année2005 2006 1ersessionDocument17 pagesRDM3 Année2005 2006 1ersessionracio03Pas encore d'évaluation
- aide_pour_les_TDDocument2 pagesaide_pour_les_TDjeangredin2Pas encore d'évaluation
- Cristal TD 1Document11 pagesCristal TD 1yahya akkaouiPas encore d'évaluation
- N°4 PendulesDocument12 pagesN°4 PendulesvanstebouPas encore d'évaluation
- 1 Sujet MelangeurDocument4 pages1 Sujet Melangeurlamiabejaoui100% (1)
- ST 3lic Emd1 Mec - Rat1Document5 pagesST 3lic Emd1 Mec - Rat1NaniBenPas encore d'évaluation
- Schemas Cinematiques + CorrigesDocument5 pagesSchemas Cinematiques + Corrigesjamal50% (2)
- Dimensionnement Du RessortDocument11 pagesDimensionnement Du RessorthamzaPas encore d'évaluation
- 228 Sujet Robot MitrailleurDocument4 pages228 Sujet Robot MitrailleurAmal NourelhadiPas encore d'évaluation
- Tête Universelle de La Fraiseuse: Présentation Du Support D'activitéDocument7 pagesTête Universelle de La Fraiseuse: Présentation Du Support D'activitéAhlèm SààdàouiPas encore d'évaluation
- Correction-Dessin de Définition PDFDocument14 pagesCorrection-Dessin de Définition PDFmohamed sedki chebbiPas encore d'évaluation
- Essais Sur L'acier 2021dDocument67 pagesEssais Sur L'acier 2021dFisso Ben BenPas encore d'évaluation
- Corrigé Pince de RobotDocument3 pagesCorrigé Pince de Robotlouis.hen62790Pas encore d'évaluation
- T.P Construction de Fresnel-CopierDocument3 pagesT.P Construction de Fresnel-CopiersendibedPas encore d'évaluation
- Corrections Série-Soudage PDFDocument18 pagesCorrections Série-Soudage PDFAdam DenniPas encore d'évaluation
- TD MecafluDocument13 pagesTD MecafluRomain ChevreuilPas encore d'évaluation
- Geophysical SurveyDocument21 pagesGeophysical SurveyZakir Yassine100% (1)
- 2009 Pondichery Exo3 Sujet ChuteBille 4ptsDocument3 pages2009 Pondichery Exo3 Sujet ChuteBille 4ptsla physique selon le programme FrançaisPas encore d'évaluation
- 5-1boite de Cisaillement PDFDocument4 pages5-1boite de Cisaillement PDFUomoD'AffariPas encore d'évaluation
- 00 SlidesDocument26 pages00 SlidesBrahim MouhcinePas encore d'évaluation
- TCH TCH: Matériaux MatériauxDocument27 pagesTCH TCH: Matériaux Matériauxsoufiane montassirPas encore d'évaluation
- CHAP 2cours Statique Des Fluides ENSADocument18 pagesCHAP 2cours Statique Des Fluides ENSAam1856100% (1)
- TP Aero EnpcDocument4 pagesTP Aero EnpcyassinePas encore d'évaluation
- 3 TPDocument49 pages3 TPMohamed AliliPas encore d'évaluation
- Electro Me Can I QueDocument128 pagesElectro Me Can I Quearmandgahounga312Pas encore d'évaluation
- Essais de Traction Sur L'acierDocument12 pagesEssais de Traction Sur L'acierAbir BenyahiaPas encore d'évaluation
- TD6 CorrectionDocument1 pageTD6 CorrectionAaliyah AndriamanamPas encore d'évaluation
- Elasticite Yves DebardDocument60 pagesElasticite Yves DebardLouc Ing100% (1)
- CH12 - Ing150Document15 pagesCH12 - Ing150jpunlimitedPas encore d'évaluation
- TP 1 Oscillateur AmortiDocument8 pagesTP 1 Oscillateur AmortiDjamel BoukredimiPas encore d'évaluation
- Magnétotellurique: Les Sources Naturelles Et Artificielles en MT Et EMDocument27 pagesMagnétotellurique: Les Sources Naturelles Et Artificielles en MT Et EMdjeddi mabrouk83% (6)
- Systeme Isostatique Exercice 3Document5 pagesSysteme Isostatique Exercice 3Djab arPas encore d'évaluation
- Chapitre 2Document7 pagesChapitre 2Mensi AbderraoufPas encore d'évaluation
- Alignement ResumeDocument2 pagesAlignement ResumeabdessamadnePas encore d'évaluation
- Série N° 14: Oscillations Mécaniques Forcées - Classification Des Acides Et Des BasesDocument3 pagesSérie N° 14: Oscillations Mécaniques Forcées - Classification Des Acides Et Des BasesGhada DaddouPas encore d'évaluation
- M106 Aéraulique Et Hydraulique AppliquéDocument321 pagesM106 Aéraulique Et Hydraulique Appliquéb.assouli36Pas encore d'évaluation
- TD2 EnonceDocument3 pagesTD2 EnonceAyÒúß ĐḡPas encore d'évaluation
- TD MaxwellDocument4 pagesTD MaxwellAbdelwahed EL BATOULPas encore d'évaluation
- Cours MR SINU WebDocument2 pagesCours MR SINU WebOusseynou Diagne100% (1)