Vous aimerez peut-être aussi
- Edgar Morin Introduction A La Pense e Complexe PDF Images Avec Recherche PDFDocument157 pagesEdgar Morin Introduction A La Pense e Complexe PDF Images Avec Recherche PDFLeonardo David Hdez83% (6)
- L'Infini Dans La Paume de La Main - Matthieu Ricard Et Thuan Trinh Xuan PDFDocument465 pagesL'Infini Dans La Paume de La Main - Matthieu Ricard Et Thuan Trinh Xuan PDFVincenzo FlightPas encore d'évaluation
- Theorie Du SignalDocument127 pagesTheorie Du Signalibadiop100% (4)
- Cours Vibrations Complet PDFDocument277 pagesCours Vibrations Complet PDFabdellah romani100% (1)
- A propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireD'EverandA propos du Digital!: Le digital pour tous! Le numérique en questions/réponses pour le modélisme ferroviaireÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Debit Industrielle FinaleDocument64 pagesDebit Industrielle FinaleChawki ZerroukiPas encore d'évaluation
- Capteur de NiveauDocument14 pagesCapteur de Niveauhama67% (3)
- Couples de Serrage - Couples de Controle (Gedore) PDFDocument12 pagesCouples de Serrage - Couples de Controle (Gedore) PDFAmi RoslanePas encore d'évaluation
- Les Ondes Mécaniques Progressives PDFDocument6 pagesLes Ondes Mécaniques Progressives PDFMarøøen Bouabid100% (2)
- Chimie Des MateriauxDocument155 pagesChimie Des Materiauxbouallegue_moun180650% (2)
- Exposé Sur L'ampèremètreDocument6 pagesExposé Sur L'ampèremètreLilo OffiPas encore d'évaluation
- Gilbert Simondon L'Individuation Psychique Et CoDocument138 pagesGilbert Simondon L'Individuation Psychique Et CoMariana Kaufman100% (1)
- Cours Capteurs 2010 - 2011, 2012 - 2013Document61 pagesCours Capteurs 2010 - 2011, 2012 - 2013Imane HammachePas encore d'évaluation
- Acquisition 2019Document66 pagesAcquisition 2019Mohamed OuaggaPas encore d'évaluation
- Mesure Et Capteurs de DébitDocument16 pagesMesure Et Capteurs de Débitrequin2101100% (1)
- Capteurs DebitDocument15 pagesCapteurs DebitsalwaPas encore d'évaluation
- Les Capteurs À Effet HallDocument18 pagesLes Capteurs À Effet HallWalid GhrairiPas encore d'évaluation
- Instrumentation 2Document28 pagesInstrumentation 2Mouaamou AbdeljabbarPas encore d'évaluation
- DébimètresDocument16 pagesDébimètrestarek_bouzayaniPas encore d'évaluation
- Cours Débimètr VolumiqueDocument14 pagesCours Débimètr VolumiqueAli AlnafePas encore d'évaluation
- Chapitre 3 - Capteurs de DébitDocument7 pagesChapitre 3 - Capteurs de DébitYosra JbeliPas encore d'évaluation
- Mesure Et Capteurs de DébitDocument14 pagesMesure Et Capteurs de Débitsoufiane soufPas encore d'évaluation
- Capteurs de Débit MassiqueDocument8 pagesCapteurs de Débit MassiqueBrahim ABAGHOUGHPas encore d'évaluation
- Mesure HydrauliqueDocument47 pagesMesure Hydrauliquechakir12100% (1)
- Chapitre 4 - Capteurs de DébitDocument11 pagesChapitre 4 - Capteurs de Débithanaya walidPas encore d'évaluation
- Chapitre 3 InstrumentationDocument27 pagesChapitre 3 InstrumentationAzertnutshaPas encore d'évaluation
- Mesure HydrauliqueDocument47 pagesMesure HydrauliqueghfgdhhngfjfghfnggPas encore d'évaluation
- Mesure Hydraulique PotentiometreDocument47 pagesMesure Hydraulique Potentiometreghiz-Pas encore d'évaluation
- Capteurs de DébitDocument14 pagesCapteurs de Débitsko88100% (1)
- Capteur Et Instrum Gim2Document69 pagesCapteur Et Instrum Gim2Guency Alven Rhocky KOMBILAPas encore d'évaluation
- MaterielsDocument6 pagesMaterielsOchi ChaimaPas encore d'évaluation
- Mesure HydrauliqueDocument47 pagesMesure HydrauliqueJOSLIN100% (1)
- Instruments de Régulation M3WDocument54 pagesInstruments de Régulation M3WZakaria MardiPas encore d'évaluation
- Chapitre 1Document9 pagesChapitre 1abdouPas encore d'évaluation
- Travail Donné: Module: Mesure Et InstrumentationDocument4 pagesTravail Donné: Module: Mesure Et InstrumentationHAMMADOUCHE NabilPas encore d'évaluation
- Chapitre-5 - (Mesure de Débit) - 2023-2024 - EtudiantDocument6 pagesChapitre-5 - (Mesure de Débit) - 2023-2024 - Etudiantpd4x8v99jfPas encore d'évaluation
- Cours IITDocument64 pagesCours IITbest.ever.2010Pas encore d'évaluation
- Prof MohcineDocument10 pagesProf MohcinebastaouiiPas encore d'évaluation
- Capteurs Caractéristiques Générales - ENSTAB CoursewareDocument140 pagesCapteurs Caractéristiques Générales - ENSTAB CoursewareTunENSTAB100% (2)
- Rapport de CapteursDocument40 pagesRapport de CapteursfranckPas encore d'évaluation
- Instrumentation 1Document28 pagesInstrumentation 1Mouaamou AbdeljabbarPas encore d'évaluation
- Débitmètre Electrique2015-16Document2 pagesDébitmètre Electrique2015-16Abdelghani BouchaalaPas encore d'évaluation
- Capteurs PressionDocument7 pagesCapteurs PressionFerdis Salah2Pas encore d'évaluation
- Chapitre 5-Capteurs de NiveauDocument10 pagesChapitre 5-Capteurs de NiveauAyadi HamedPas encore d'évaluation
- Les Capteurs - GénéralitésDocument29 pagesLes Capteurs - GénéralitésGherzouli MeriemPas encore d'évaluation
- New Microsoft Word DocumentDocument24 pagesNew Microsoft Word DocumentCristian PredaPas encore d'évaluation
- 2ATC EleveDocument94 pages2ATC EleveFarid OufqirPas encore d'évaluation
- Thème 4 - Instrumentation GPCDocument12 pagesThème 4 - Instrumentation GPCHajar AbunaeemPas encore d'évaluation
- Chapitre IIIDocument26 pagesChapitre IIILina alikhPas encore d'évaluation
- Capteurs AcquisitionDocument42 pagesCapteurs AcquisitionAhmed yacine kadriPas encore d'évaluation
- Techniques de RégulationDocument66 pagesTechniques de RégulationDaniel Julien DIOUKAMBA MBOUNGOU100% (1)
- Les Jauges de PressionDocument9 pagesLes Jauges de PressionBlan CooPas encore d'évaluation
- Les Capteurs de Mesure de Courants - Capteur À Effet HallDocument18 pagesLes Capteurs de Mesure de Courants - Capteur À Effet HallМхамед Аит АбдерахманPas encore d'évaluation
- TP Mécanique Fluide 2022-2023 - (Mà j10) - EtudiantDocument50 pagesTP Mécanique Fluide 2022-2023 - (Mà j10) - EtudiantIsmail OularbiPas encore d'évaluation
- Mesure de PressionDocument8 pagesMesure de PressionHedi Ben MohamedPas encore d'évaluation
- Capteurs FRDocument8 pagesCapteurs FRleroy makita loubakiPas encore d'évaluation
- Sitelec Org Cours Dereumaux Mesureniveau Htm#pressionDocument4 pagesSitelec Org Cours Dereumaux Mesureniveau Htm#pression62qtpr6gxyPas encore d'évaluation
- Rapport TP Étude D'un VenturiDocument13 pagesRapport TP Étude D'un VenturiOumaima100% (1)
- M4 Cours 2Document8 pagesM4 Cours 2Hocine HocinePas encore d'évaluation
- Notions D HydrauliqueDocument13 pagesNotions D HydrauliqueMajide MajdPas encore d'évaluation
- L3 AUT Cours Capteur CHM ch5Document14 pagesL3 AUT Cours Capteur CHM ch5Ishak BoukhPas encore d'évaluation
- Capteurs Intelligents Part4Document82 pagesCapteurs Intelligents Part4Simo AbkariPas encore d'évaluation
- Capter Grandeur - LC - v2015 10 08Document4 pagesCapter Grandeur - LC - v2015 10 08ahmed lpPas encore d'évaluation
- Mèmoire Merouane CHemmamDocument30 pagesMèmoire Merouane CHemmamMerouane CHemmamPas encore d'évaluation
- Capteur de NiveauDocument13 pagesCapteur de NiveauNoui MouhamedPas encore d'évaluation
- Capteurs Cours - PartieDocument56 pagesCapteurs Cours - Partiezahra lbbaguePas encore d'évaluation
- Cem Into3Document11 pagesCem Into3Sab RinaPas encore d'évaluation
- Charge DéchargeDocument6 pagesCharge DéchargeSab RinaPas encore d'évaluation
- Cem IntoDocument18 pagesCem IntoSab RinaPas encore d'évaluation
- Capteurs de PressionDocument20 pagesCapteurs de PressionSab RinaPas encore d'évaluation
- Cem Into - 2Document14 pagesCem Into - 2Sab RinaPas encore d'évaluation
- S4 TD 3 - MergedDocument3 pagesS4 TD 3 - MergedSab RinaPas encore d'évaluation
- 6 التفشيDocument3 pages6 التفشيSab RinaPas encore d'évaluation
- Fourier TransformDocument27 pagesFourier TransformSab RinaPas encore d'évaluation
- S4 TD 6 - MergedDocument2 pagesS4 TD 6 - MergedSab RinaPas encore d'évaluation
- S4 TD 5 - MergedDocument3 pagesS4 TD 5 - MergedSab RinaPas encore d'évaluation
- Derivation NumériqueDocument5 pagesDerivation NumériqueSab RinaPas encore d'évaluation
- Systeme MecaniqueDocument1 pageSysteme MecaniqueSab RinaPas encore d'évaluation
- S4 TD 4 - MergedDocument4 pagesS4 TD 4 - MergedSab RinaPas encore d'évaluation
- TD 1 ElnDocument5 pagesTD 1 ElnSab RinaPas encore d'évaluation
- S4 TD 1 - MergedDocument2 pagesS4 TD 1 - MergedSab RinaPas encore d'évaluation
- S4 TD 2 - MergedDocument2 pagesS4 TD 2 - MergedSab RinaPas encore d'évaluation
- TD3 2022Document3 pagesTD3 2022Sab RinaPas encore d'évaluation
- Chapitre 1 ElnDocument16 pagesChapitre 1 ElnSab RinaPas encore d'évaluation
- Chapitre 3 ElnDocument7 pagesChapitre 3 ElnSab RinaPas encore d'évaluation
- Spline MergedDocument9 pagesSpline MergedSab RinaPas encore d'évaluation
- ANA NUM 2 - Cours Equations Differentielles OrdinairesDocument6 pagesANA NUM 2 - Cours Equations Differentielles OrdinairesSab RinaPas encore d'évaluation
- Chapitre 2 ElnDocument22 pagesChapitre 2 ElnSab RinaPas encore d'évaluation
- TD TransistorDocument2 pagesTD TransistorSab RinaPas encore d'évaluation
- ANA NUM 2 - Cours Chapitre 4Document12 pagesANA NUM 2 - Cours Chapitre 4Sab RinaPas encore d'évaluation
- ANA NUM 2 - Intégration NumériqueDocument6 pagesANA NUM 2 - Intégration NumériqueSab RinaPas encore d'évaluation
- Language SQLDocument18 pagesLanguage SQLSab RinaPas encore d'évaluation
- ANA NUM 2 - Cours Approximation PolynômialeDocument9 pagesANA NUM 2 - Cours Approximation PolynômialeSab RinaPas encore d'évaluation
- L'algebre RelationnelleDocument6 pagesL'algebre RelationnelleSab RinaPas encore d'évaluation
- Programme Instrumentation Et Métrologie LEEA2 - S3 PDFDocument2 pagesProgramme Instrumentation Et Métrologie LEEA2 - S3 PDFParfumerie Actu'EllePas encore d'évaluation
- Exercice 1Document6 pagesExercice 1Houssam FerrahPas encore d'évaluation
- Chap I I Biomedical eDocument26 pagesChap I I Biomedical eZOUHAIR KADDIOUIPas encore d'évaluation
- Correction Examen PC Juin 2016 2bac SVT FRDocument7 pagesCorrection Examen PC Juin 2016 2bac SVT FRhassan ibnahmadPas encore d'évaluation
- Ens ScientDocument1 pageEns ScientfachaferreroPas encore d'évaluation
- FT Vide InertieDocument5 pagesFT Vide InertielaurynPas encore d'évaluation
- تمارينDocument4 pagesتمارينnouraddine tadmoriPas encore d'évaluation
- Dans Les Secrets de L UniversDocument165 pagesDans Les Secrets de L UniversNihad FarahPas encore d'évaluation
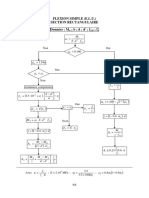
- Organigrame BaelDocument5 pagesOrganigrame BaelKaram HoussamPas encore d'évaluation
- Les Transformations PhysiquesDocument6 pagesLes Transformations Physiquesbcmdata bcmdata100% (1)
- 1.série N°1 de Chimie II - 1er CP - 2018-2019 ModDocument7 pages1.série N°1 de Chimie II - 1er CP - 2018-2019 ModLAICHAOUI NOURELIMANEPas encore d'évaluation
- M Ecanique Quantique II - Corrig e S Erie 2: 1 Delta de Dirac IDocument9 pagesM Ecanique Quantique II - Corrig e S Erie 2: 1 Delta de Dirac Iaba armelPas encore d'évaluation
- Cours DSsDocument227 pagesCours DSslouabdiaPas encore d'évaluation
- YAICHDocument187 pagesYAICHAnonymous yIQPdchHPas encore d'évaluation
- QCM Phisique-ChimieDocument2 pagesQCM Phisique-ChimieklowkerPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4anas100% (1)
- Modélisation en 2 Dimensions D'une Poutre de Forme Rectangulaire Trouée, Homogène Et Isotrope en Élastoplasticité Sous Sollicitation StatiqueDocument8 pagesModélisation en 2 Dimensions D'une Poutre de Forme Rectangulaire Trouée, Homogène Et Isotrope en Élastoplasticité Sous Sollicitation StatiqueYOUNES KABBAJPas encore d'évaluation
- Chap M2Document33 pagesChap M2Kader MilanoPas encore d'évaluation
- Dossier Corrigé MecaDocument8 pagesDossier Corrigé Mecaantoine71160Pas encore d'évaluation
- Formulaire Dipoles ParfaitsDocument1 pageFormulaire Dipoles ParfaitsDavid100% (1)
- 55-1-2 PhysicsDocument15 pages55-1-2 PhysicsAli GadaPas encore d'évaluation
- C4 2Document22 pagesC4 2Hoang-Vu BuiPas encore d'évaluation
- Cours S4 Edp 08Document81 pagesCours S4 Edp 08Guy Gildas DjemPas encore d'évaluation