Vous aimerez peut-être aussi
- Homographie: Homographie : transformations en vision par ordinateurD'EverandHomographie: Homographie : transformations en vision par ordinateurPas encore d'évaluation
- Manuel de Cours PHY106 - Chap 1 CinémaDocument15 pagesManuel de Cours PHY106 - Chap 1 CinémaAdote Akue100% (1)
- TD Ue MP-CP L1 Ufhb 22-23Document4 pagesTD Ue MP-CP L1 Ufhb 22-23FULGENCE DIBIPas encore d'évaluation
- Physique Essentiel - Du.coursDocument74 pagesPhysique Essentiel - Du.coursED-DBIBI fatimaezzahraePas encore d'évaluation
- Phy 1Document14 pagesPhy 1sun_rachidPas encore d'évaluation
- Chap 2 VF Mécanique Du Point SVTU S2 2014 15 by ExoSup - Com-1Document13 pagesChap 2 VF Mécanique Du Point SVTU S2 2014 15 by ExoSup - Com-1setefav697Pas encore d'évaluation
- CTRL PropositionfDocument2 pagesCTRL PropositionfboulaichPas encore d'évaluation
- Mouv Relatif EXO Corrig SDocument14 pagesMouv Relatif EXO Corrig SzakiPas encore d'évaluation
- La Cinematique Du Point MaterielDocument28 pagesLa Cinematique Du Point Materielahmed kitari100% (1)
- Corrigés - Série 2Document15 pagesCorrigés - Série 2thiziroarour0Pas encore d'évaluation
- Chapitre 1Document5 pagesChapitre 1beloufaPas encore d'évaluation
- FormulaireDocument3 pagesFormulaireCəvahir AğazadəPas encore d'évaluation
- Changement de RéferentielDocument7 pagesChangement de RéferentielK.Romaric KaboréPas encore d'évaluation
- Cinematique Du PointDocument19 pagesCinematique Du PointLucien TenorPas encore d'évaluation
- Corriges 07Document23 pagesCorriges 07Jordan TADONBOUPas encore d'évaluation
- Physique PDFDocument8 pagesPhysique PDFhajar zainiPas encore d'évaluation
- ExerciceDocument2 pagesExerciceMustapha ZakiPas encore d'évaluation
- Cinématique Du Solide IndéformableDocument15 pagesCinématique Du Solide IndéformableLarbi Elbakkali100% (2)
- Réseau (De Diffraction) ÉcheletteDocument3 pagesRéseau (De Diffraction) Écheletteraja dhiefPas encore d'évaluation
- DifférentiellesDocument4 pagesDifférentiellesalexf4Pas encore d'évaluation
- Fiche MécaniqueDocument15 pagesFiche MécaniqueAdel Haj SalemPas encore d'évaluation
- ATS Physique 957Document6 pagesATS Physique 957Paolo HoguoPas encore d'évaluation
- Cinematique Du Solidecours CompletDocument28 pagesCinematique Du Solidecours CompletIlu SionPas encore d'évaluation
- GeomDocument28 pagesGeomIlyasse LemezaliPas encore d'évaluation
- Exercices Corriges Mecanique Du PointDocument124 pagesExercices Corriges Mecanique Du PointarmandgahoungaPas encore d'évaluation
- Partie 7Document6 pagesPartie 7Naoual39Pas encore d'évaluation
- Cinématique Du Solide - ExtraitDocument8 pagesCinématique Du Solide - ExtraitSékhou DiakitéPas encore d'évaluation
- Cours Meca 2021Document8 pagesCours Meca 2021WilliamPas encore d'évaluation
- (Réseaux) TD 3-Erreurs (Correction)Document11 pages(Réseaux) TD 3-Erreurs (Correction)maliwariPas encore d'évaluation
- Courbes Polaires PDFDocument13 pagesCourbes Polaires PDFWPas encore d'évaluation
- Cours - Equations Differentielles Et Suites Recurrentes LineairesDocument11 pagesCours - Equations Differentielles Et Suites Recurrentes LineairesMaitredixPas encore d'évaluation
- MP Physique X 1 2011.corrigéDocument4 pagesMP Physique X 1 2011.corrigéqpuc198Pas encore d'évaluation
- GradientDocument3 pagesGradientrihame92Pas encore d'évaluation
- Le Gradient D'une Fonction ScalaireDocument3 pagesLe Gradient D'une Fonction ScalaireSami NasryPas encore d'évaluation
- Epreuve Blanche MecaDocument2 pagesEpreuve Blanche MecaIsaacar Moye la SouzaPas encore d'évaluation
- Exmecanique 2008-2009 5Document7 pagesExmecanique 2008-2009 5Salim ErrabiiPas encore d'évaluation
- Apc Cours de Physiques TD Et TC.Document73 pagesApc Cours de Physiques TD Et TC.Magatte DiopPas encore d'évaluation
- A Savoir InertieDocument3 pagesA Savoir InertieemyazPas encore d'évaluation
- 04 Composition Des Vitesses Et AccélérationsDocument8 pages04 Composition Des Vitesses Et AccélérationsNitos IncoPas encore d'évaluation
- 7résumé 1 Du Mécanique Du SolideDocument8 pages7résumé 1 Du Mécanique Du SolidehajarPas encore d'évaluation
- SERIE 3 MécaniqueDocument2 pagesSERIE 3 MécaniqueEld Ayoub0% (1)
- Corrige MMC L3 2011S2Document4 pagesCorrige MMC L3 2011S2Leopold MokaPas encore d'évaluation
- 12 Meca 1a 3Document4 pages12 Meca 1a 3Aime Desire wogouPas encore d'évaluation
- Formalisme de Lagrange Et Oscillations Linéaires Partie 1 Et 2 OkDocument43 pagesFormalisme de Lagrange Et Oscillations Linéaires Partie 1 Et 2 Okboukredimijames1958Pas encore d'évaluation
- Serie4 09Document4 pagesSerie4 09donsimoPas encore d'évaluation
- Chap 2 Mecanique Du Point SVTU 2017-18Document16 pagesChap 2 Mecanique Du Point SVTU 2017-18azzam100% (1)
- TD Mecanique Des Fluides PC Ribiere PDFDocument56 pagesTD Mecanique Des Fluides PC Ribiere PDFdiopPas encore d'évaluation
- Document FluidesDocument6 pagesDocument FluidesAnas MenoirPas encore d'évaluation
- CCR 2018Document2 pagesCCR 2018bilalbbkPas encore d'évaluation
- Cinematique Corr PDFDocument5 pagesCinematique Corr PDFSimoPas encore d'évaluation
- Corrige Physique PC 2022Document4 pagesCorrige Physique PC 2022Lionel MonteiroPas encore d'évaluation
- E Ph2psi2018Document7 pagesE Ph2psi2018ahmadPas encore d'évaluation
- Colles 17Document1 pageColles 17Penda NiassPas encore d'évaluation
- TD 3 Mécanique Du Point MatérielDocument7 pagesTD 3 Mécanique Du Point Matérielelmahdi.elkasmiPas encore d'évaluation
- Changement de RéférentielDocument7 pagesChangement de RéférentielHossam TalibPas encore d'évaluation
- Serie1 09 PDFDocument3 pagesSerie1 09 PDFAbdessalem JerbiPas encore d'évaluation
- Leçons sur les séries trigonométriques : professées au Collège de FranceD'EverandLeçons sur les séries trigonométriques : professées au Collège de FrancePas encore d'évaluation
- Transformation du radon: Dévoiler des modèles cachés dans les données visuellesD'EverandTransformation du radon: Dévoiler des modèles cachés dans les données visuellesPas encore d'évaluation
- Fiche de Revision DNB PDFDocument19 pagesFiche de Revision DNB PDFMohamed MeatiPas encore d'évaluation
- Physicss Paper 1 TZ2 HLDocument23 pagesPhysicss Paper 1 TZ2 HLLaurus NagPas encore d'évaluation
- Eurocode 3 P 1.8 Calcul Des Assemblages CMDocument142 pagesEurocode 3 P 1.8 Calcul Des Assemblages CMKyser Sose100% (1)
- Série D'exercices N°4 (Avec Correction) - Chimie L'élement Chimique - 2ème TI (2010-2011) MR AbdessatarDocument3 pagesSérie D'exercices N°4 (Avec Correction) - Chimie L'élement Chimique - 2ème TI (2010-2011) MR AbdessatarHadhri Hadhri100% (9)
- Dilatation SDocument3 pagesDilatation Sckhaled30% (1)
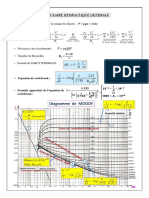
- Formulaire Hydraulique-2021-2022Document2 pagesFormulaire Hydraulique-2021-2022Soumaya IdrissiPas encore d'évaluation
- X Ens MP Physique 2022 SujetDocument13 pagesX Ens MP Physique 2022 SujetTricePas encore d'évaluation
- TD 1Document2 pagesTD 1M L100% (1)
- TP N°2: Etude Des Caractéristiques D'un Moteur Asynchrone Triphasé À CageDocument4 pagesTP N°2: Etude Des Caractéristiques D'un Moteur Asynchrone Triphasé À CageBrandy Odonnell100% (5)
- DisjoncteurDocument14 pagesDisjoncteurFatima100% (1)
- Cosmologie Des Fondements Théoriques Aux Observations PDFDocument488 pagesCosmologie Des Fondements Théoriques Aux Observations PDFhassan_hamo100% (2)
- LHB 1998063Document6 pagesLHB 1998063Amine ChettouhiPas encore d'évaluation
- MSD 2Document29 pagesMSD 2Maroua LHPas encore d'évaluation
- Aero Chimie-Diagrammes ThermodynamiquesDocument8 pagesAero Chimie-Diagrammes ThermodynamiquesKader MilanoPas encore d'évaluation
- X Ens MP 2019 Physique Si SujetDocument15 pagesX Ens MP 2019 Physique Si SujetSohaib EL KARMIPas encore d'évaluation
- (15 - 16) LÉVINAS Emmanuel (La Compréhension de La Spiritualité Dans Les Cultures Française Et Allemande)Document13 pages(15 - 16) LÉVINAS Emmanuel (La Compréhension de La Spiritualité Dans Les Cultures Française Et Allemande)johncarlouy2945Pas encore d'évaluation
- Resume Ondes EMDocument2 pagesResume Ondes EManass sbniPas encore d'évaluation
- Les Ondes Mecaniques Progressives Exercices Non Corriges 4Document2 pagesLes Ondes Mecaniques Progressives Exercices Non Corriges 4Hamza Oushikh100% (5)
- Physico-Chimie Des ÉlectrolytesDocument79 pagesPhysico-Chimie Des ÉlectrolytesAbdelhakim Bailal100% (2)
- Modèle Cinématique DirectDocument7 pagesModèle Cinématique DirectsiamPas encore d'évaluation
- Formulaire RDM Poutres SimplesDocument25 pagesFormulaire RDM Poutres SimplesMohamed Zakaria ZaidiPas encore d'évaluation
- Young PDFDocument15 pagesYoung PDFDaboPas encore d'évaluation
- Correction Exam 10janvier20 M1 GEPDocument8 pagesCorrection Exam 10janvier20 M1 GEPJenina ManksPas encore d'évaluation
- Formule de ClapeyronDocument7 pagesFormule de ClapeyronakaabadrePas encore d'évaluation
- TP2AnalyseTempFrequL2Auto PDFDocument4 pagesTP2AnalyseTempFrequL2Auto PDFMimouni MohamedPas encore d'évaluation
- AdielDocument5 pagesAdielAnonymous McOPrXPas encore d'évaluation
- Organigramme B.A PDFDocument5 pagesOrganigramme B.A PDFValentin Ignace Manga100% (1)
- Calcul Ehangeurs 2011-12Document261 pagesCalcul Ehangeurs 2011-12Fadwa Elouadi67% (6)
- Cours de Thermique L3 SPI 2017Document29 pagesCours de Thermique L3 SPI 2017azzamPas encore d'évaluation
- Physics Paper 1 TZ1 HLDocument24 pagesPhysics Paper 1 TZ1 HLruukiPas encore d'évaluation