Vous aimerez peut-être aussi
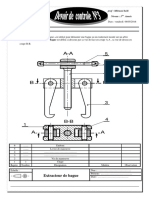
- Devoir de Contrôle N°3 Extracteur de Bague 2015 2016 (MR Mtiraoui Hedi) PDFDocument5 pagesDevoir de Contrôle N°3 Extracteur de Bague 2015 2016 (MR Mtiraoui Hedi) PDFRidha GouadriaPas encore d'évaluation
- Devoir de Synthese N1 1AS 2022 Étau de PerceuseDocument5 pagesDevoir de Synthese N1 1AS 2022 Étau de PerceuseZied BaccarPas encore d'évaluation
- Devoir Synthèse N°1 1er 2022Document4 pagesDevoir Synthèse N°1 1er 2022Sofien GesmiPas encore d'évaluation
- Ve Reglable Devoir de Synthese N 3 CorrigerDocument15 pagesVe Reglable Devoir de Synthese N 3 CorrigerJawher Salem74% (19)
- Devoir de Contrôle N°1 - Génie Mécanique - Fraiseuse Automatique - 3ème Technique (2018-2019) MR Dhifaoui AbdelwahebDocument8 pagesDevoir de Contrôle N°1 - Génie Mécanique - Fraiseuse Automatique - 3ème Technique (2018-2019) MR Dhifaoui AbdelwahebKereme JulienPas encore d'évaluation
- Cours Initiation Technique 8eme Amel SallemiDocument6 pagesCours Initiation Technique 8eme Amel SallemiAHLEM RMida100% (1)
- Lycée Habib Thameur: Ecrou SerréDocument6 pagesLycée Habib Thameur: Ecrou SerréAbdelmajid ZouaghiPas encore d'évaluation
- Devoir de Contrôle N°1 2009 2010 (Jemmali Hassen)Document4 pagesDevoir de Contrôle N°1 2009 2010 (Jemmali Hassen)housinmechani1Pas encore d'évaluation
- Devoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotDocument4 pagesDevoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotArfaoui AymenPas encore d'évaluation
- Evaluation Cotation Fonctionnelle Vrin BoschDocument4 pagesEvaluation Cotation Fonctionnelle Vrin Boschhasan bishPas encore d'évaluation
- EXAMEN - Janvier 2021 - Éléments de Machines - LGM2Document6 pagesEXAMEN - Janvier 2021 - Éléments de Machines - LGM2Khaled GammoudiPas encore d'évaluation
- DS1 3 11 12DPMécaDocument4 pagesDS1 3 11 12DPMécaBouabdellaoui saif ennasr100% (1)
- TD ProcedeDocument2 pagesTD Procedeyousseftrimech4871Pas encore d'évaluation
- 05 GammeDocument76 pages05 GammeAlaa AbarPas encore d'évaluation
- Controlen°1 2020Document4 pagesControlen°1 2020Youssef Aouadi0% (1)
- Devoir de Contrôle N°2 Avec Correction - Génie Mécanique - Bac Technique (2020-2021) MR BEN AMMAR MustaphaDocument4 pagesDevoir de Contrôle N°2 Avec Correction - Génie Mécanique - Bac Technique (2020-2021) MR BEN AMMAR MustaphaGalena PrincePas encore d'évaluation
- Devoir de Contrôle N°2 2008 2009 (Ouslatia Kairouan4)Document4 pagesDevoir de Contrôle N°2 2008 2009 (Ouslatia Kairouan4)EL OUDDARI100% (2)
- Devoir de Synthèse N°2 - Technologie - 1ère AS (2009-2010)Document4 pagesDevoir de Synthèse N°2 - Technologie - 1ère AS (2009-2010)medaminebennacer30Pas encore d'évaluation
- 2007-Synthèse de FABRICATION MECANIQUEDocument4 pages2007-Synthèse de FABRICATION MECANIQUEcha benPas encore d'évaluation
- DEVOIR DE Controle N°1 Vé 2021Document3 pagesDEVOIR DE Controle N°1 Vé 2021Saifeddine BrikiPas encore d'évaluation
- Transformation de MVT 2024Document9 pagesTransformation de MVT 2024hajhammouda174Pas encore d'évaluation
- Devoir de MaisonDocument9 pagesDevoir de MaisonBen Moustapha DembelePas encore d'évaluation
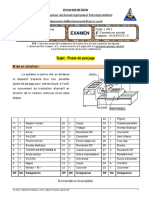
- Devoir de Synthèse N°1 - Technologie Poste de Percage Et Taraudage - 2ème Sciences (2010-2011) MR Raouf OuardiDocument7 pagesDevoir de Synthèse N°1 - Technologie Poste de Percage Et Taraudage - 2ème Sciences (2010-2011) MR Raouf OuardiGhost GhostPas encore d'évaluation
- Devoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezDocument5 pagesDevoir de Synthèse N°2 - Technologie MALAXEUR DE SABLE - Bac Technique (2010-2011) MR ZAAFOURI MehrezAmira JebaliPas encore d'évaluation
- Cours Lycée Pilote - Technologie Le GRAFCET - 2ème Sciences (2014-2015) MR Rafik Ben AmorDocument10 pagesCours Lycée Pilote - Technologie Le GRAFCET - 2ème Sciences (2014-2015) MR Rafik Ben AmorHana KhemissiPas encore d'évaluation
- Devoir de Controle N1-1AS-2021-hache ViandesDocument3 pagesDevoir de Controle N1-1AS-2021-hache ViandesSaber Maalaoui0% (1)
- DS N°1-1AS-2020-hache+viandes+Document4 pagesDS N°1-1AS-2020-hache+viandes+Youssef Aouadi0% (2)
- Devoir de Synthèse N°1 PDFDocument4 pagesDevoir de Synthèse N°1 PDFEl Hâfÿîdÿî KamelPas encore d'évaluation
- 05 Fraiseuse UniverselleDocument15 pages05 Fraiseuse UniverselleKereme JulienPas encore d'évaluation
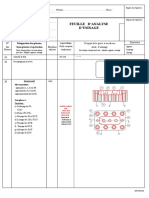
- Feuille Analyse Gamme UsinageDocument2 pagesFeuille Analyse Gamme UsinageBouhdida MohamedPas encore d'évaluation
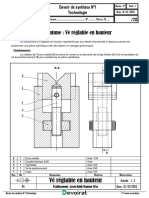
- Devoir de Synthèse N°1 - Technologie - ETAU DE SERRAGE - 1ère AS (2019-2020) MR Zouaghi AbdelmajidDocument6 pagesDevoir de Synthèse N°1 - Technologie - ETAU DE SERRAGE - 1ère AS (2019-2020) MR Zouaghi AbdelmajidabidmecPas encore d'évaluation
- 628393d26101b Revision BAC TPDocument11 pages628393d26101b Revision BAC TPAziz OuazPas encore d'évaluation
- DR2 2020 Mechanical R2018Document11 pagesDR2 2020 Mechanical R2018Fethi BenmassoudePas encore d'évaluation
- APPLICATIONDocument2 pagesAPPLICATIONIsmail EzzinePas encore d'évaluation
- DR 1Document5 pagesDR 1Hassine AliPas encore d'évaluation
- Devoir de Synthèse N°1 - Technologie - 2ème Technique (2022-2023) MR ZOUAGHI AbdelmajidDocument8 pagesDevoir de Synthèse N°1 - Technologie - 2ème Technique (2022-2023) MR ZOUAGHI AbdelmajidAhmedPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Électrique - Bac Technique (2011-2012) MR Raouafi AbdallahDocument4 pagesDevoir de Synthèse N°1 - Génie Électrique - Bac Technique (2011-2012) MR Raouafi AbdallahFethi BenmassoudePas encore d'évaluation
- 5 Filtres PDFDocument16 pages5 Filtres PDFMESSIPas encore d'évaluation
- Guidage en TranslationDocument33 pagesGuidage en TranslationMohamed SaifPas encore d'évaluation
- DRM CorrigéDocument6 pagesDRM CorrigéNajet MarsPas encore d'évaluation
- SpécialDocument4 pagesSpécialAbdelmajid Zouaghi100% (1)
- Examen GIM - Usinage Fabrication 2024Document5 pagesExamen GIM - Usinage Fabrication 2024David VHOUMBYPas encore d'évaluation
- Usiner 4 Rainures Sur Un Arbre Cylindrique: 1. Etude Fonctionnelle: (1.75 PT)Document6 pagesUsiner 4 Rainures Sur Un Arbre Cylindrique: 1. Etude Fonctionnelle: (1.75 PT)Najet MarsPas encore d'évaluation
- Mecan M 2012 PDFDocument102 pagesMecan M 2012 PDFMohamedAyoubPas encore d'évaluation
- University of Djelfa: NoteDocument10 pagesUniversity of Djelfa: NoteAisaoui AisaouiPas encore d'évaluation
- Devoir Controle N1-1AS-2021-sans MontageDocument3 pagesDevoir Controle N1-1AS-2021-sans Montagenabiha20232024Pas encore d'évaluation
- TH Var2 MGP1Document6 pagesTH Var2 MGP1mourad mouradPas encore d'évaluation
- Ds1 1as 2022 Fin YoutubeDocument5 pagesDs1 1as 2022 Fin YoutubeAhmed Aloui100% (1)
- Devoir de Contrôle N°1 - Génie Mécanique Cric Hydraulque - 3ème Technique (2022-2023) MR Mlaouhi Slaheddine 2Document5 pagesDevoir de Contrôle N°1 - Génie Mécanique Cric Hydraulque - 3ème Technique (2022-2023) MR Mlaouhi Slaheddine 2ashrefaskri9Pas encore d'évaluation
- Graphe de Montage Et de DémontageDocument5 pagesGraphe de Montage Et de DémontageMohsen Laabidi91% (11)
- T.P 02 (V2) D RDocument5 pagesT.P 02 (V2) D RMrnadhir MecaniquePas encore d'évaluation
- 2019-2020-DSN°2-1ère-Vé RéglableDocument7 pages2019-2020-DSN°2-1ère-Vé RéglableAdam BensaidPas encore d'évaluation
- DS1 1AS 2022 Fin YoutubeDocument5 pagesDS1 1AS 2022 Fin YoutubeHoussam Had100% (1)
- ds1 1sec 21 22Document6 pagesds1 1sec 21 22Saleh LaifiPas encore d'évaluation
- Th1 MGP1Document7 pagesTh1 MGP1mourad mouradPas encore d'évaluation
- D.R DT DS3 MA I2022 REGpour La Prochaine ScéanceDocument8 pagesD.R DT DS3 MA I2022 REGpour La Prochaine Scéanceilyessaoudi13Pas encore d'évaluation
- DC1 1ére2 2020Document3 pagesDC1 1ére2 2020Mohsen Laabidi100% (2)
- Controle1 S1Document8 pagesControle1 S1Darid AnwarPas encore d'évaluation
- Devoir N°1 1stmDocument5 pagesDevoir N°1 1stmyassine lakhalPas encore d'évaluation
- Traité d'économétrie financière: Modélisation financièreD'EverandTraité d'économétrie financière: Modélisation financièrePas encore d'évaluation
- DC - Productique - Fabrication Prototypage - L2MT - Avril 2023Document3 pagesDC - Productique - Fabrication Prototypage - L2MT - Avril 2023jmolka0Pas encore d'évaluation
- DC - CN - L2GM-MT - Avril - 2022Document1 pageDC - CN - L2GM-MT - Avril - 2022jmolka0Pas encore d'évaluation
- DC - Productique - Fabrication Prototypage - L2MT - Mai 2021Document1 pageDC - Productique - Fabrication Prototypage - L2MT - Mai 2021jmolka0Pas encore d'évaluation
- ch1 ModeDocument17 pagesch1 Modejmolka0Pas encore d'évaluation
- ch3 Elec 1Document13 pagesch3 Elec 1jmolka0Pas encore d'évaluation
- ch3 Elec 2Document18 pagesch3 Elec 2jmolka0Pas encore d'évaluation
- ch5 Mode 1Document16 pagesch5 Mode 1jmolka0Pas encore d'évaluation
- ch4 Hydr 2Document14 pagesch4 Hydr 2jmolka0Pas encore d'évaluation
- ch5 Mode 2Document9 pagesch5 Mode 2jmolka0Pas encore d'évaluation
- Manipulationdes OvinsDocument38 pagesManipulationdes OvinsDhaif dhaifPas encore d'évaluation
- REL M16 - Optimisation Du TransportDocument13 pagesREL M16 - Optimisation Du TransportelmourchidPas encore d'évaluation
- Chapitre 3-2023Document71 pagesChapitre 3-2023Diwani NessrinePas encore d'évaluation
- Nouvel Edito B1 UD1 Didier 2012 Unite1 Dossier1Document12 pagesNouvel Edito B1 UD1 Didier 2012 Unite1 Dossier1VCBPas encore d'évaluation
- Cours Evaluation Entreprise 2021 (15413)Document11 pagesCours Evaluation Entreprise 2021 (15413)Imane Fares100% (1)
- MembraneDocument14 pagesMembraneImene HarbaouiPas encore d'évaluation
- Article Critique 29 09Document3 pagesArticle Critique 29 09Kamila OkumaPas encore d'évaluation
- Guide Recrute Sans DiscriminerDocument40 pagesGuide Recrute Sans DiscriminerClaudia MCPas encore d'évaluation
- Mesures AngulairesDocument21 pagesMesures AngulairesREGAYEG abdiPas encore d'évaluation
- Dossier-presse-SIA-2015 SAUCE GRAINE ABIDJANDocument5 pagesDossier-presse-SIA-2015 SAUCE GRAINE ABIDJANKennedy JohnsonPas encore d'évaluation
- Le Système OctalDocument2 pagesLe Système OctalitriiPas encore d'évaluation
- Code Electoral UydiiDocument6 pagesCode Electoral UydiiFrédéricPas encore d'évaluation
- Module 1 AuditDocument65 pagesModule 1 AuditAliou DialloPas encore d'évaluation
- Notice Nac Rd6 2016Document180 pagesNotice Nac Rd6 2016tautenePas encore d'évaluation
- Météorologie Et Aérologie: 1 - Le Nuage Figurant Sur La Photographie Ci-Contre Est UnDocument5 pagesMétéorologie Et Aérologie: 1 - Le Nuage Figurant Sur La Photographie Ci-Contre Est UnE.I.R.L BONNAL GillesPas encore d'évaluation
- Pain D'épiceDocument2 pagesPain D'épiceYves LevesquePas encore d'évaluation
- 5-Emballage Et ConditionnementDocument23 pages5-Emballage Et ConditionnementISMAEL ABDILLAHI0% (1)
- 1 Ttexte Le Travail J Gagner Sa Vie J À Quel Prix Résumé PDFDocument1 page1 Ttexte Le Travail J Gagner Sa Vie J À Quel Prix Résumé PDFsaad BakkaliPas encore d'évaluation
- BTS Constructions MetalliquesDocument2 pagesBTS Constructions MetalliquesIbrahim KamaraPas encore d'évaluation
- 24 12 HADEF Data Sheet Spur Gear HoistDocument3 pages24 12 HADEF Data Sheet Spur Gear HoistNenad PetrovicPas encore d'évaluation
- From Revit To RobotDocument30 pagesFrom Revit To RobotKamel Eddine BenhaddouPas encore d'évaluation
- Liste Des Présents Mariages CoutumiersDocument2 pagesListe Des Présents Mariages CoutumiersPavlic YACKAMAMBOUPas encore d'évaluation
- Manuel QualiteDocument15 pagesManuel QualitekoffiPas encore d'évaluation
- Etude Phytochimique Et Biologique de Leea Guinensis (Leeaceae)Document233 pagesEtude Phytochimique Et Biologique de Leea Guinensis (Leeaceae)ophil7467% (3)
- FTTCDocument6 pagesFTTCZoheir AhmedPas encore d'évaluation
- Manuel Soundcraft EFX8 PDFDocument56 pagesManuel Soundcraft EFX8 PDFcontact8876Pas encore d'évaluation
- GMAO OptiMaint - Manuel de Prise en MainDocument64 pagesGMAO OptiMaint - Manuel de Prise en MainBilogba Alex86% (7)
- TM 4003 Mud Agitator FR Rev00Document120 pagesTM 4003 Mud Agitator FR Rev00Noureddine AdjPas encore d'évaluation
- Chapitre 7 - FormationDocument4 pagesChapitre 7 - FormationLoubaba Ibn OmarPas encore d'évaluation