Vous aimerez peut-être aussi
- Automatique: Les Grands Articles d'UniversalisD'EverandAutomatique: Les Grands Articles d'UniversalisPas encore d'évaluation
- Généralités Sur Les Systèmes AsservisDocument8 pagesGénéralités Sur Les Systèmes AsservisHamza HamzaPas encore d'évaluation
- Maison Intelligente: Conception et réalisation d'une maison intelligenteD'EverandMaison Intelligente: Conception et réalisation d'une maison intelligenteÉvaluation : 4 sur 5 étoiles4/5 (5)
- Rapport AutomatiqueDocument15 pagesRapport AutomatiqueMariam SajidPas encore d'évaluation
- Automatique Linéaire: Asservissement & RegulationDocument55 pagesAutomatique Linéaire: Asservissement & RegulationAhmed Rhif100% (4)
- Future ArchitictureDocument16 pagesFuture ArchitictureMaamar ElomariPas encore d'évaluation
- Régulation Et Instrumentation1Document11 pagesRégulation Et Instrumentation1Mohammed SalahPas encore d'évaluation
- TP Régulation de TempératureDocument10 pagesTP Régulation de TempératureHadia DjeltiPas encore d'évaluation
- Automatique Lineaire Asservissement Regulation PDFDocument55 pagesAutomatique Lineaire Asservissement Regulation PDFMohamed Benrahal100% (1)
- Mini Projet RégulationDocument18 pagesMini Projet RégulationHanae BoutabaPas encore d'évaluation
- Cours AutomatiqueDocument82 pagesCours Automatiquesamson100% (1)
- TP Eyadridi, NawresbenismailDocument4 pagesTP Eyadridi, NawresbenismailZouhair DridiPas encore d'évaluation
- 1-Notions de Système AsservisDocument5 pages1-Notions de Système AsservisMht zene hassanePas encore d'évaluation
- KhaledDocument16 pagesKhaledKhaled BouzidiPas encore d'évaluation
- Chapitre01 Cours Regulation Et Asservissement 3licence 2021Document5 pagesChapitre01 Cours Regulation Et Asservissement 3licence 2021mohamd techPas encore d'évaluation
- Compte Rendu TP3 AutomatiqueDocument13 pagesCompte Rendu TP3 AutomatiquezayenifadwaPas encore d'évaluation
- Cours Automatique PDFDocument59 pagesCours Automatique PDFkim100% (1)
- AsservissementDocument47 pagesAsservissementsage blanqui nzaouPas encore d'évaluation
- TP AutomatiqueDocument54 pagesTP Automatiquedjnabilos88% (8)
- Chapitre4 Les RégulateursPIDDocument11 pagesChapitre4 Les RégulateursPIDSalim Bouazizi100% (1)
- 5 Synthèse Systèmes de Commande E PDFDocument51 pages5 Synthèse Systèmes de Commande E PDFrajaa latifiPas encore d'évaluation
- Tp1auto PDFDocument6 pagesTp1auto PDFChayeb NoroPas encore d'évaluation
- TP 1 AutoDocument6 pagesTP 1 AutoChayeb NoroPas encore d'évaluation
- TP Ca 2Document13 pagesTP Ca 2Terkia AitPas encore d'évaluation
- Asservissement de Position Et de Vitesse D'une Articulation RobotiqueDocument23 pagesAsservissement de Position Et de Vitesse D'une Articulation RobotiqueHachemi Bhe100% (9)
- Chapitre II: Dimensionnement D'un Régulateur PID Par La Méthode de Ziegler - NicholsDocument17 pagesChapitre II: Dimensionnement D'un Régulateur PID Par La Méthode de Ziegler - Nicholsomda31Pas encore d'évaluation
- Régulation Par Step 7Document64 pagesRégulation Par Step 7Мхамед Аит Абдерахман100% (3)
- CHAPITRE 2 Introduction Aux Systèmes AsservisDocument8 pagesCHAPITRE 2 Introduction Aux Systèmes AsservisAbdelhadi LahachamiPas encore d'évaluation
- Chapitre 3Document24 pagesChapitre 3Mehdi Houari ZaidPas encore d'évaluation
- Chapitre01 2022 Cours Regulation Et Asservissement 3licence GMDocument6 pagesChapitre01 2022 Cours Regulation Et Asservissement 3licence GMmoussa yaserPas encore d'évaluation
- TP 1 DoughDocument9 pagesTP 1 Doughleo slegPas encore d'évaluation
- AUTOMATIQUEDocument50 pagesAUTOMATIQUEAyoüb Sou UadPas encore d'évaluation
- Chapitre 1et 2 REGULATIONDocument40 pagesChapitre 1et 2 REGULATIONAmal ChafaiiPas encore d'évaluation
- Régulation IndustrielleDocument14 pagesRégulation IndustrielleOUMAYMA CHMARKHPas encore d'évaluation
- tp02 ErnDocument9 pagestp02 ErnAkram AbdessemedPas encore d'évaluation
- Régulation Des Systemes DynamiquesDocument134 pagesRégulation Des Systemes Dynamiquessamson100% (1)
- Automatique Cours Partie 2Document68 pagesAutomatique Cours Partie 2AnisPas encore d'évaluation
- Fiche TD N°2Document5 pagesFiche TD N°2anderson leonidassPas encore d'évaluation
- Chap3 RégulationPID NDocument21 pagesChap3 RégulationPID NMalek MalekPas encore d'évaluation
- Rgulation Et Contrle SalamDocument92 pagesRgulation Et Contrle SalamDjamalPas encore d'évaluation
- Fonction de Transfert RéelleDocument2 pagesFonction de Transfert RéelleNidhal CherratPas encore d'évaluation
- PID FlouDocument6 pagesPID FlouhafsaPas encore d'évaluation
- Etude Realisation D'une Carte D'acquisition de Donnees A Base de Microcontroleur PIC 16F876Document69 pagesEtude Realisation D'une Carte D'acquisition de Donnees A Base de Microcontroleur PIC 16F876Mahdi FilaliPas encore d'évaluation
- Cours+TD+DS Régulation-et-AutomatismeDocument158 pagesCours+TD+DS Régulation-et-AutomatismeLghazi OumssadPas encore d'évaluation
- Chapitre 1 - Introduction À La Régulation IndustrielleDocument10 pagesChapitre 1 - Introduction À La Régulation IndustrielleMagraoui AbdelkadirPas encore d'évaluation
- Cours I-1Document3 pagesCours I-1Mohamed DjaiPas encore d'évaluation
- Automatique Et Régulation IndustrielleDocument59 pagesAutomatique Et Régulation IndustrielleYoussef MakmoulPas encore d'évaluation
- Regulateur PIDDocument14 pagesRegulateur PIDsaidiabdelhamidePas encore d'évaluation
- 1 L'Historique, Et La Régulation Automatique Aujourd'huiDocument21 pages1 L'Historique, Et La Régulation Automatique Aujourd'huiRadouan SahbPas encore d'évaluation
- Cours Régulation Industrielle - Chap 1&2Document58 pagesCours Régulation Industrielle - Chap 1&2Lghazi OumssadPas encore d'évaluation
- TP 3 CpaDocument22 pagesTP 3 CpaOuail MakhebiPas encore d'évaluation
- Technologie Et Réglage Des Régulateurs PDFDocument25 pagesTechnologie Et Réglage Des Régulateurs PDFKaziiLaggounPas encore d'évaluation
- Cours Eléments de Contrôle AutomatiqueDocument31 pagesCours Eléments de Contrôle AutomatiqueDavy Jean Draha100% (2)
- 1 - Systemes Asservis Lineaires ContinusDocument18 pages1 - Systemes Asservis Lineaires Continusselma tiguiniPas encore d'évaluation
- Automatique Chapitre IiDocument19 pagesAutomatique Chapitre IiRuphin KabaselePas encore d'évaluation
- M2 INST Elem - Reg NumDocument6 pagesM2 INST Elem - Reg NumMehdi LaserPas encore d'évaluation
- Régulation Pour Les TableautistesDocument111 pagesRégulation Pour Les TableautistesSimon NakyangPas encore d'évaluation
- COURS RegulationDocument95 pagesCOURS Regulationyasser ChemssoPas encore d'évaluation
- Chapitre 1 SechageDocument29 pagesChapitre 1 Sechageferiel zianiPas encore d'évaluation
- Intoduction ExposéDocument1 pageIntoduction Exposéferiel zianiPas encore d'évaluation
- SOL TD2 Exercices 4 Et 5Document3 pagesSOL TD2 Exercices 4 Et 5feriel zianiPas encore d'évaluation
- Intoduction ExposéDocument1 pageIntoduction Exposéferiel zianiPas encore d'évaluation
- TD 04 03 2024Document2 pagesTD 04 03 2024feriel zianiPas encore d'évaluation
- Resumé BarrageDocument6 pagesResumé Barrageferiel zianiPas encore d'évaluation
- Exposéé Management de ProjetDocument19 pagesExposéé Management de Projetferiel zianiPas encore d'évaluation
- SERIE D EXERCICES MOTEUR COURANT CONTINU (PDF - Io)Document2 pagesSERIE D EXERCICES MOTEUR COURANT CONTINU (PDF - Io)feriel zianiPas encore d'évaluation
- TP Eolienne 0000Document7 pagesTP Eolienne 0000feriel zianiPas encore d'évaluation
- 09 - Boucle de RegulationDocument2 pages09 - Boucle de Regulationchabane_148549100% (1)
- TD 3 - Transformée en Z Et Systèmes NumériquesDocument1 pageTD 3 - Transformée en Z Et Systèmes NumériquesYoudas TairiPas encore d'évaluation
- Epreuve + Corrigé-Type - Devoir Surveillé Automatique-Asservissement - Juin 2021 - Tous CentresDocument10 pagesEpreuve + Corrigé-Type - Devoir Surveillé Automatique-Asservissement - Juin 2021 - Tous CentresGael ODJOPas encore d'évaluation
- P2 Calmettes DiaporamaDocument84 pagesP2 Calmettes DiaporamaSeddik MehenniPas encore d'évaluation
- (Automatique) S1-IntroductionDocument22 pages(Automatique) S1-IntroductionMichel GaultPas encore d'évaluation
- Serie9 Asservissement PDFDocument8 pagesSerie9 Asservissement PDFHichem HamdiPas encore d'évaluation
- Fichier Fascicule TPDocument16 pagesFichier Fascicule TPorg 2019Pas encore d'évaluation
- ch1 Representation Symbolique-RégDocument4 pagesch1 Representation Symbolique-RégBladi AhlaPas encore d'évaluation
- Livre Asservissement LineaireDocument289 pagesLivre Asservissement LineaireSamir Sayah50% (6)
- ExercicesDocument14 pagesExercicesАднан Бен АзузPas encore d'évaluation
- Régulation IndustrielleDocument14 pagesRégulation IndustrielleOUMAYMA CHMARKHPas encore d'évaluation
- Rc3a9vision Automatique Des Systc3a8mes Mc3a9caniques - Sc3a9ance 4Document29 pagesRc3a9vision Automatique Des Systc3a8mes Mc3a9caniques - Sc3a9ance 4Idoumou AbdemouPas encore d'évaluation
- Instrumentation ElectroniqueDocument10 pagesInstrumentation Electroniqueaymen errejiouiPas encore d'évaluation
- Chapitre 2Document16 pagesChapitre 2Timble GrandenPas encore d'évaluation
- 01 Manuel de Cours GEESA-23Document54 pages01 Manuel de Cours GEESA-23amiremr00Pas encore d'évaluation
- Le PID Utilisé en Régulation de Position Et/ou de Vitesse de Moteurs ÉlectriquesDocument24 pagesLe PID Utilisé en Régulation de Position Et/ou de Vitesse de Moteurs ÉlectriquesAlaa BergayaPas encore d'évaluation
- Automatique YawoDocument108 pagesAutomatique YawoGael ODJOPas encore d'évaluation
- TD2 FiltresDocument4 pagesTD2 FiltresAya HafsiPas encore d'évaluation
- Document TP 2 Auto Ts2 2011-2012Document61 pagesDocument TP 2 Auto Ts2 2011-2012HazarPas encore d'évaluation
- j1 124 2 Asservissement CorrectionDocument10 pagesj1 124 2 Asservissement CorrectionmarnPas encore d'évaluation
- Rapport FinalDocument99 pagesRapport FinalahmedPas encore d'évaluation
- TP3 Ass 21-22-CopierDocument4 pagesTP3 Ass 21-22-CopierMohammed BenmiaPas encore d'évaluation
- Matlab Et Simulink Pour Lenseignement Des Sciences de LingenieurDocument42 pagesMatlab Et Simulink Pour Lenseignement Des Sciences de LingenieurfaylikokiPas encore d'évaluation
- Chapitre01 Cours Regulation Et Asservissement 3licence 2021Document5 pagesChapitre01 Cours Regulation Et Asservissement 3licence 2021mohamd techPas encore d'évaluation
- Mooc s5 2Document9 pagesMooc s5 2mobio jeanPas encore d'évaluation
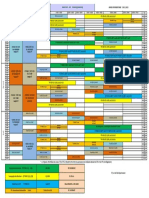
- Emploi Du Temps S6 (ELT) 2021-2022 - Actualisé - 11-05-2022Document1 pageEmploi Du Temps S6 (ELT) 2021-2022 - Actualisé - 11-05-2022amine adnanePas encore d'évaluation
- Cour 1 AA LN1 PDFDocument59 pagesCour 1 AA LN1 PDFrubis tarekPas encore d'évaluation
- 12c.résumé Sur La Synthèse Des Régulateurs-Automatique Systèmes ContinusxDocument5 pages12c.résumé Sur La Synthèse Des Régulateurs-Automatique Systèmes ContinusxRuphin KabaselePas encore d'évaluation
- ASSER Cours - Performances Des Systèmes Asservis - CorrigéDocument18 pagesASSER Cours - Performances Des Systèmes Asservis - CorrigémouniaPas encore d'évaluation
- Rapport TP Régulation IndustrielleDocument10 pagesRapport TP Régulation Industrielletwiha000Pas encore d'évaluation
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationD'EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationPas encore d'évaluation
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)D'EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Évaluation : 4 sur 5 étoiles4/5 (2)
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationD'EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationPas encore d'évaluation
- L'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.D'EverandL'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Évaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserD'EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserPas encore d'évaluation
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsD'EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsÉvaluation : 3.5 sur 5 étoiles3.5/5 (19)
- Dark Python : Apprenez à créer vos outils de hacking.D'EverandDark Python : Apprenez à créer vos outils de hacking.Évaluation : 3 sur 5 étoiles3/5 (1)
- Technologie automobile: Les Grands Articles d'UniversalisD'EverandTechnologie automobile: Les Grands Articles d'UniversalisPas encore d'évaluation
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 5 sur 5 étoiles5/5 (2)
- Conception & Modélisation CAO: Le guide ultime du débutantD'EverandConception & Modélisation CAO: Le guide ultime du débutantPas encore d'évaluation
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésD'EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésÉvaluation : 3.5 sur 5 étoiles3.5/5 (4)
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxD'EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxÉvaluation : 1 sur 5 étoiles1/5 (1)
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxD'EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Le Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsD'EverandLe Bon Accord avec le Bon Fournisseur: Comment Mobiliser Toute la Puissance de vos Partenaires Commerciaux pour Réaliser vos ObjectifsÉvaluation : 4 sur 5 étoiles4/5 (2)
- Dans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellD'EverandDans l'esprit des grand investisseurs: Un voyage à la découverte de la psychologie utilisée par les plus grands investisseurs de tous les temps à travers des analyses opérationnellÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.D'EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Pas encore d'évaluation
- Le marketing d'affiliation en 4 étapes: Comment gagner de l'argent avec des affiliés en créant des systèmes commerciaux qui fonctionnentD'EverandLe marketing d'affiliation en 4 étapes: Comment gagner de l'argent avec des affiliés en créant des systèmes commerciaux qui fonctionnentPas encore d'évaluation
- Le money management facile à apprendre: Comment tirer profit des techniques et stratégies de gestion de l'argent pour améliorer l'activité de trading en ligneD'EverandLe money management facile à apprendre: Comment tirer profit des techniques et stratégies de gestion de l'argent pour améliorer l'activité de trading en ligneÉvaluation : 3 sur 5 étoiles3/5 (3)
- Le trading des bandes de bollinger facile à apprendre: Comment apprendre à utiliser les bandes de bollinger pour faire du commerce en ligne avec succèsD'EverandLe trading des bandes de bollinger facile à apprendre: Comment apprendre à utiliser les bandes de bollinger pour faire du commerce en ligne avec succèsÉvaluation : 5 sur 5 étoiles5/5 (1)
- NFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueD'EverandNFT et Cryptoart: Le guide complet pour investir, créer et vendre avec succès des jetons non fongibles sur le marché de l'art numériqueÉvaluation : 5 sur 5 étoiles5/5 (5)
- Manuel de fabrication du savon: Je fabrique mes savons facilementD'EverandManuel de fabrication du savon: Je fabrique mes savons facilementÉvaluation : 5 sur 5 étoiles5/5 (4)
- WiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxD'EverandWiFi Hacking : Le guide simplifié du débutant pour apprendre le hacking des réseaux WiFi avec Kali LinuxÉvaluation : 3 sur 5 étoiles3/5 (1)
- Hacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersD'EverandHacking pour débutant Le guide ultime du débutant pour apprendre les bases du hacking avec Kali Linux et comment se protéger des hackersPas encore d'évaluation
- Comment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.D'EverandComment analyser les gens : Introduction à l’analyse du langage corporel et les types de personnalité.Pas encore d'évaluation
- Blockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondeD'EverandBlockchain: Applications et compréhension du monde réel: Comment appliquer la Blockchain dans votre mondePas encore d'évaluation