Vous aimerez peut-être aussi
- Bac GM Metro Juin95 Centre UsinageDocument24 pagesBac GM Metro Juin95 Centre UsinageMohamed Dridi100% (1)
- Le développement de systèmes d'information (Le): Une méthode intégrée à la transformation des processus, 4e éditionD'EverandLe développement de systèmes d'information (Le): Une méthode intégrée à la transformation des processus, 4e éditionPas encore d'évaluation
- Machine de Debitage de CeinturesDocument14 pagesMachine de Debitage de CeinturesGuiliass100% (1)
- Devoir de Synthèse N°1 - Génie Mécanique Systeme de Fabrication de Couvercles - Bac Technique (2014-2015) MR LotfiDocument12 pagesDevoir de Synthèse N°1 - Génie Mécanique Systeme de Fabrication de Couvercles - Bac Technique (2014-2015) MR Lotfizxhmnzao100% (2)
- MS180 MS180CDocument24 pagesMS180 MS180CuimPas encore d'évaluation
- Dossier Technique-Sommaire, DT1,2&3Document5 pagesDossier Technique-Sommaire, DT1,2&3Gamin'Pas encore d'évaluation
- DT_DS2_3ST_23_24Document7 pagesDT_DS2_3ST_23_24Nejib JallouliPas encore d'évaluation
- Vérin REXROTH FixationsDocument24 pagesVérin REXROTH FixationsSimon CocoPas encore d'évaluation
- Définition de L'idée de ProjetDocument2 pagesDéfinition de L'idée de ProjethichemPas encore d'évaluation
- Caja de Cambios (106 GTI Gr.a)Document9 pagesCaja de Cambios (106 GTI Gr.a)blancohccPas encore d'évaluation
- Caja de Cambios (106 Kit Car 8V)Document10 pagesCaja de Cambios (106 Kit Car 8V)blancohccPas encore d'évaluation
- Devoir de Synthèse N°3 - Génie Mécanique Transmission de Mouvement Cadreuse Automatique - 3ème Technique (2013-2014) MR Mlaouhi SlaheddineDocument12 pagesDevoir de Synthèse N°3 - Génie Mécanique Transmission de Mouvement Cadreuse Automatique - 3ème Technique (2013-2014) MR Mlaouhi Slaheddinemoussa zainPas encore d'évaluation
- HC50 S e 055 W B 38 M B (T38)Document12 pagesHC50 S e 055 W B 38 M B (T38)Franklin Gallardo ArayaPas encore d'évaluation
- Caracteristiques 2CV 1963-1970Document6 pagesCaracteristiques 2CV 1963-1970Jan MaňasPas encore d'évaluation
- Stihl-Hs45 Parts DiagramDocument26 pagesStihl-Hs45 Parts DiagramtunznathPas encore d'évaluation
- DT_DS2_3ST_23_24Document7 pagesDT_DS2_3ST_23_24Nejib JallouliPas encore d'évaluation
- Caja de Cambios (206 CC Copa)Document9 pagesCaja de Cambios (206 CC Copa)blancohccPas encore d'évaluation
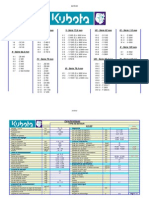
- Aprietes KubotaDocument78 pagesAprietes KubotaJOSEALBERICH80% (5)
- 1975 CitroenDocument6 pages1975 CitroenRafael SadiPas encore d'évaluation
- MC5000 FrenchDocument21 pagesMC5000 FrenchsinchicovichPas encore d'évaluation
- Peugeot MoteurDw10 (2,0LHdi)Document28 pagesPeugeot MoteurDw10 (2,0LHdi)Rodolphe Sandrine VoisyPas encore d'évaluation
- Caja de Cambios Crabots (106 Maxi)Document9 pagesCaja de Cambios Crabots (106 Maxi)blancohccPas encore d'évaluation
- D HPDocument52 pagesD HPSoufiane El OuezzaniPas encore d'évaluation
- TMM2 GIM Sujet 1 ROUE DE MOTEUR HYDRAULIQUEDocument8 pagesTMM2 GIM Sujet 1 ROUE DE MOTEUR HYDRAULIQUEThierry BoulayPas encore d'évaluation
- Technique Book BeuchatDocument301 pagesTechnique Book Beuchatsch_stefanPas encore d'évaluation
- Unite de Fabrication de Couvercle en Beton Dossier TechniqueDocument6 pagesUnite de Fabrication de Couvercle en Beton Dossier TechniqueHoussamHannad50% (2)
- Re 102 KDocument24 pagesRe 102 KclegracielaPas encore d'évaluation
- DT Tracteur Embarreur NOMENCLATUREDocument1 pageDT Tracteur Embarreur NOMENCLATUREMehrez ZaafouriPas encore d'évaluation
- 03 BDocument8 pages03 BRavengerPas encore d'évaluation
- AscenseurDocument22 pagesAscenseurAljane BelgacemPas encore d'évaluation
- Stihl 032Document40 pagesStihl 032Rafael MoraisPas encore d'évaluation
- DS1!12!13 4ST SOUSSE Complet Prod Pots MielDocument35 pagesDS1!12!13 4ST SOUSSE Complet Prod Pots Miellotfi75% (4)
- Ponce UseDocument7 pagesPonce UseAbderrazak MiassarPas encore d'évaluation
- Caja de Cambios (206 XS Desafío)Document9 pagesCaja de Cambios (206 XS Desafío)blancohccPas encore d'évaluation
- Caja de Cambios Crabots (309 - 306 GTI Gr.a)Document10 pagesCaja de Cambios Crabots (309 - 306 GTI Gr.a)blancohccPas encore d'évaluation
- AnetDocument25 pagesAnetGerard DupondPas encore d'évaluation
- FS48 FS52 FS56 305Document22 pagesFS48 FS52 FS56 305Philippe MartinPas encore d'évaluation
- 1600Document51 pages1600Cezar FlorinPas encore d'évaluation
- Theme 2 Tambour MoteurDocument7 pagesTheme 2 Tambour MoteurKenou Laudince100% (1)
- HaubanageDocument12 pagesHaubanageRosemary GuerreroPas encore d'évaluation
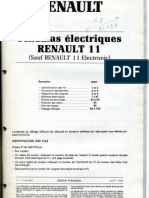
- Schema Elecrikal Renault 11Document100 pagesSchema Elecrikal Renault 1124262380% (1)
- 724 - 904 - Catalogue de Pieces de RechangeDocument73 pages724 - 904 - Catalogue de Pieces de RechangenicolasPas encore d'évaluation
- Devoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFDocument7 pagesDevoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFmohouchPas encore d'évaluation
- Re140kre160k 302Document34 pagesRe140kre160k 302garrettgtPas encore d'évaluation
- DS3 4ST 0809 DT GR Kairouan Unite DusinageDocument5 pagesDS3 4ST 0809 DT GR Kairouan Unite DusinageArwa Berrich0% (1)
- Bac STI GM Antilles Guyane Juin2001 SujetDocument30 pagesBac STI GM Antilles Guyane Juin2001 SujetAli TrikiPas encore d'évaluation
- Sopladora 471KATDocument8 pagesSopladora 471KATishigoPas encore d'évaluation
- Technologie de Construction CC 2014 2015 PDFDocument12 pagesTechnologie de Construction CC 2014 2015 PDFisrael melchisedechPas encore d'évaluation
- Suj 1 SMDocument6 pagesSuj 1 SMMouâd Bihi100% (1)
- 03 ADocument16 pages03 AMélinda ArnoldPas encore d'évaluation
- Verins Cnomo IsoDocument21 pagesVerins Cnomo Isoyouri59490Pas encore d'évaluation
- Travaux DirigesDocument32 pagesTravaux Dirigestarik outalPas encore d'évaluation
- BTS2005 2 ComplementsDocument17 pagesBTS2005 2 Complementssaded05Pas encore d'évaluation
- FR 4715 Brochure Rescue ToolsDocument32 pagesFR 4715 Brochure Rescue ToolsLoic FerlandaPas encore d'évaluation
- FCS230 Vanne 3 Voies MotoriseeDocument11 pagesFCS230 Vanne 3 Voies MotoriseeMEPas encore d'évaluation
- Technique Beton Systemes de Levage Et D Ancrage Section 2Document27 pagesTechnique Beton Systemes de Levage Et D Ancrage Section 2Nawfel MimouniPas encore d'évaluation
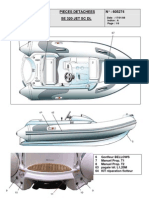
- Avon320dl SC V80371 + V80374Document13 pagesAvon320dl SC V80371 + V80374Karl Tellander100% (2)
- 3 - DC N°1 2019 - 2020 (Trottinette Electrique)Document6 pages3 - DC N°1 2019 - 2020 (Trottinette Electrique)Elafif Hamdi100% (1)
- Moteur Tu5jp4Document13 pagesMoteur Tu5jp4José RodriguesPas encore d'évaluation
- CFM - TechnoDocument18 pagesCFM - TechnoAli TrikiPas encore d'évaluation
- 1 10 09 Crs Cotation FonctionnelleDocument7 pages1 10 09 Crs Cotation FonctionnelleYnsip SmixPas encore d'évaluation
- Manuel Epanet 2Document222 pagesManuel Epanet 2sosi2020100% (2)
- 209 RectificationDocument5 pages209 RectificationSidi RachPas encore d'évaluation
- Ex 14Document5 pagesEx 14Ali TrikiPas encore d'évaluation
- Couple Outil-Piece 3Document4 pagesCouple Outil-Piece 3Mohamed Abed100% (1)
- (FS01) Intro Aux Liaisons MecaDocument3 pages(FS01) Intro Aux Liaisons MecaAli TrikiPas encore d'évaluation
- Activités PédagogiquesDocument3 pagesActivités PédagogiquesAli TrikiPas encore d'évaluation
- 00174854001134482987Document40 pages00174854001134482987Ali TrikiPas encore d'évaluation
- Présentation 2Document2 pagesPrésentation 2Ali TrikiPas encore d'évaluation
- Usinage Par AbrasionDocument1 pageUsinage Par AbrasionmatozoPas encore d'évaluation
- Notes de Cours TCH040 - H2011Document93 pagesNotes de Cours TCH040 - H2011Ali TrikiPas encore d'évaluation
- Determination Des Parametres de CoupeDocument33 pagesDetermination Des Parametres de CoupeAli Triki0% (1)
- Cours UsinageDocument10 pagesCours UsinageAli TrikiPas encore d'évaluation
- Abrasifs AgglomeresDocument14 pagesAbrasifs AgglomeresAli TrikiPas encore d'évaluation
- ChapitreiDocument11 pagesChapitreiAli TrikiPas encore d'évaluation
- Exam COR20Document6 pagesExam COR20Ali TrikiPas encore d'évaluation
- ChapitreivDocument9 pagesChapitreivAli TrikiPas encore d'évaluation
- Conditions de CoupeDocument8 pagesConditions de Coupemaraghni_hassine7592Pas encore d'évaluation
- Cours UsinageDocument10 pagesCours UsinageAli TrikiPas encore d'évaluation
- Bac STI GM Antilles Guyane Juin2001 SujetDocument30 pagesBac STI GM Antilles Guyane Juin2001 SujetAli TrikiPas encore d'évaluation
- 1059 TP Doser Par ConductimetrieDocument3 pages1059 TP Doser Par ConductimetrieAli TrikiPas encore d'évaluation
- Systأ¨me globale et environnementDocument3 pagesSystأ¨me globale et environnementAli TrikiPas encore d'évaluation
- 1057 TP Synthese ChimiqueDocument1 page1057 TP Synthese ChimiqueAli TrikiPas encore d'évaluation
- Bac STI GM Antilles Guyane Juin2001 Corrigé DOCDocument11 pagesBac STI GM Antilles Guyane Juin2001 Corrigé DOCAli TrikiPas encore d'évaluation
- PageDocument2 pagesPageAli TrikiPas encore d'évaluation
- 4 Etude de Cas Systemes HydroliqueDocument45 pages4 Etude de Cas Systemes HydroliqueAli TrikiPas encore d'évaluation
- Tornos Dmag 200901048 Lub HLP Hydraulic FRDocument4 pagesTornos Dmag 200901048 Lub HLP Hydraulic FRAli TrikiPas encore d'évaluation
- RapportLicence-Master - Methode de RedactionDocument1 pageRapportLicence-Master - Methode de RedactionAli TrikiPas encore d'évaluation
- Ad-N 720 T 41-45 WT My 2013 PDFDocument9 pagesAd-N 720 T 41-45 WT My 2013 PDFKhalido DigoPas encore d'évaluation
- 3 Renf Struct SOCOBAT 2022 - CDocument59 pages3 Renf Struct SOCOBAT 2022 - Ckhalil helalPas encore d'évaluation
- Mapeplast UW - 01 - 09 PDFDocument3 pagesMapeplast UW - 01 - 09 PDFMohamed InedjarPas encore d'évaluation
- Chap Comptage DebitmetrieDocument6 pagesChap Comptage DebitmetrieDuboisPas encore d'évaluation
- Béton Armé - Avant-Propos PDFDocument5 pagesBéton Armé - Avant-Propos PDFNacer AssamPas encore d'évaluation
- These FEMTO 2023 - 5fmicromecanique Interface Fibre MatriceDocument4 pagesThese FEMTO 2023 - 5fmicromecanique Interface Fibre MatriceJihen BoukadidaPas encore d'évaluation
- Corrigé Sel Seconde 5Document2 pagesCorrigé Sel Seconde 5Mariie JosyPas encore d'évaluation
- Examen Local 5 Physique Chimie 3ac SujetDocument1 pageExamen Local 5 Physique Chimie 3ac SujetHbn S'hraPas encore d'évaluation
- RuhalPervezMemonMFKA2016 FRDocument28 pagesRuhalPervezMemonMFKA2016 FRdiablo kouamPas encore d'évaluation
- Trait EmentDocument11 pagesTrait EmenthakoPas encore d'évaluation
- Cours Eco Entreprises l1 Seg Et Isn 2020Document51 pagesCours Eco Entreprises l1 Seg Et Isn 2020diakite fatimPas encore d'évaluation
- VEDDocument6 pagesVEDMohamed Anouar BidaPas encore d'évaluation
- La FlexionDocument6 pagesLa Flexionkanoukone4Pas encore d'évaluation
- CND 2022 INtroDocument32 pagesCND 2022 INtroAhmed RACHDIPas encore d'évaluation
- Rapport de Stage2 PDFDocument27 pagesRapport de Stage2 PDFBenachir TnaibiPas encore d'évaluation
- Gilet Rosa 2021 FR S1mhy6Document9 pagesGilet Rosa 2021 FR S1mhy6Annie LabiauPas encore d'évaluation
- Expose Fabrication MecaniqueDocument10 pagesExpose Fabrication MecaniqueYounes NedjoumPas encore d'évaluation
- Rendement de La Pile À CombustibleDocument4 pagesRendement de La Pile À CombustibleSalomey El'fejerPas encore d'évaluation
- Pied de Poteau EncastrésDocument25 pagesPied de Poteau EncastrésblueengPas encore d'évaluation
- Dillidur400v 05 2011 FDocument4 pagesDillidur400v 05 2011 FFerdak AminePas encore d'évaluation
- Ex IUPGSI05Document3 pagesEx IUPGSI05MaëlAoayPas encore d'évaluation
- Introduction To Thermostats technologyFR20140218 PDFDocument28 pagesIntroduction To Thermostats technologyFR20140218 PDFramzi2521Pas encore d'évaluation
- LTM 1090/2 - Tourelle OW-04: Couronne D'orientation À Rouleaux (ROD)Document8 pagesLTM 1090/2 - Tourelle OW-04: Couronne D'orientation À Rouleaux (ROD)ncirPas encore d'évaluation
- Présentation2 1Document46 pagesPrésentation2 1Mahamadou Makan DiakitéPas encore d'évaluation
- Soap CalculatorDocument20 pagesSoap CalculatorbelkodiaPas encore d'évaluation
- BORDEREAU VRD Res Lobna 08-12-2019Document6 pagesBORDEREAU VRD Res Lobna 08-12-2019MedAminBenTaiebPas encore d'évaluation
- 2012 AlexandreMerleDocument233 pages2012 AlexandreMerletiktokPas encore d'évaluation