Vous aimerez peut-être aussi
- Devoir Surveillé D'automatique-Formation Agrégative en Génie MécaniqueDocument8 pagesDevoir Surveillé D'automatique-Formation Agrégative en Génie MécaniqueKhmira WafaPas encore d'évaluation
- TP Commande Optimale N - 1Document1 pageTP Commande Optimale N - 1Haykel Mhedhbi100% (2)
- TD IdentificationDocument7 pagesTD IdentificationKhalifa BakkarPas encore d'évaluation
- Support de Cours - API - Chap2 - Le GRAFCETDocument23 pagesSupport de Cours - API - Chap2 - Le GRAFCETJetsetasianboiPas encore d'évaluation
- Rapport de Bahatt tp2Document7 pagesRapport de Bahatt tp2asmae amiriPas encore d'évaluation
- Commande Optimale Cours PDFDocument2 pagesCommande Optimale Cours PDFJustin33% (3)
- TP-Représentation D'etatDocument9 pagesTP-Représentation D'etatKooraNow HDPas encore d'évaluation
- Le Système Non Linéaire Continu D'ordreDocument7 pagesLe Système Non Linéaire Continu D'ordreAhmad QudymatPas encore d'évaluation
- TD-Commande PrédictiveDocument4 pagesTD-Commande PrédictivekhaledteslaPas encore d'évaluation
- TP 1 CommandeDocument11 pagesTP 1 CommandeDilekh AnisPas encore d'évaluation
- Asservissement Échantillonné PDFDocument79 pagesAsservissement Échantillonné PDFFabrice FotsoPas encore d'évaluation
- Regulation Industrielle Cours4Document29 pagesRegulation Industrielle Cours4Pj le Welpi0% (1)
- Cours Aoutoma - EchantionéDocument146 pagesCours Aoutoma - Echantionéhamzalotfi60100% (1)
- TD Co Version1Document3 pagesTD Co Version1Anass TaouFik75% (4)
- 2020 - 2021 - TP1 - SEER - 2 & GECSI-2 - Commande Par Retour d'État+Commande Optimale D'un MCCDocument2 pages2020 - 2021 - TP1 - SEER - 2 & GECSI-2 - Commande Par Retour d'État+Commande Optimale D'un MCCimad el-ghayouryPas encore d'évaluation
- Tp2 CommandeDocument21 pagesTp2 CommandeBilal valontinoPas encore d'évaluation
- Devoir Commande NumeriqueDocument5 pagesDevoir Commande NumeriqueRazan Zainab Bouhmidi100% (1)
- Adjimi LobnaDocument56 pagesAdjimi LobnaRabah AmidiPas encore d'évaluation
- TD Correction PID AnalogiqueDocument13 pagesTD Correction PID AnalogiqueChristian DinhoPas encore d'évaluation
- Correction TD 3 RegulationDocument21 pagesCorrection TD 3 Regulationhichem ajinaPas encore d'évaluation
- TP 2 A 1Document10 pagesTP 2 A 1Samagassi SouleymanePas encore d'évaluation
- Projet MNDocument4 pagesProjet MNOutmane KACHACHPas encore d'évaluation
- TD3 - Régulation de NiveauDocument1 pageTD3 - Régulation de Niveaukadirimar01Pas encore d'évaluation
- Chapitre 2Document52 pagesChapitre 2ELmokhtar HamrouniPas encore d'évaluation
- TS1131Document1 pageTS1131amidi5555913Pas encore d'évaluation
- Matlab 9Document3 pagesMatlab 9Kaoutar Ib100% (1)
- Automatique TP N°1Document16 pagesAutomatique TP N°1KHALIL MRIZIKPas encore d'évaluation
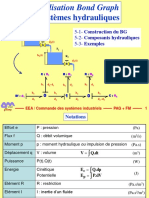
- 5-Systèmes Hydrauliques: Modélisation Bond GraphDocument15 pages5-Systèmes Hydrauliques: Modélisation Bond GraphmassinisssaPas encore d'évaluation
- Commande Retour D Etat E11Document41 pagesCommande Retour D Etat E11Amine AzaoumPas encore d'évaluation
- TD CH21Document4 pagesTD CH21Hichem HamdiPas encore d'évaluation
- Régulation Industrielle-Chapitre 3-2017-BF (4 Avril 2017)Document27 pagesRégulation Industrielle-Chapitre 3-2017-BF (4 Avril 2017)amine milanoPas encore d'évaluation
- TP N°2 - Représentation Des Systèmes Linéaires Sous MatlabDocument4 pagesTP N°2 - Représentation Des Systèmes Linéaires Sous MatlabAymen Hed100% (1)
- Slides PlatitudeDocument194 pagesSlides PlatitudeHami DzicPas encore d'évaluation
- Rapport Des Travaux PratiquesDocument33 pagesRapport Des Travaux PratiquesYassir EL AYYADIPas encore d'évaluation
- Resolution Equation DifferentielleDocument6 pagesResolution Equation DifferentielletortorouPas encore d'évaluation
- 1a Automatique Poly PDFDocument119 pages1a Automatique Poly PDFaimalPas encore d'évaluation
- Regulateur PIDDocument4 pagesRegulateur PIDmguisse100% (1)
- Bond-Graphs Model Diag Command1Document43 pagesBond-Graphs Model Diag Command1Abdel Daa100% (1)
- Slides1 SNL 2019Document41 pagesSlides1 SNL 2019hit master100% (1)
- CR TP ReDocument18 pagesCR TP ReWissal AntraPas encore d'évaluation
- MatlabDocument12 pagesMatlabA.HoussainPas encore d'évaluation
- Cours Commande Par Mode GlissantDocument7 pagesCours Commande Par Mode GlissantAmine Haddad75% (4)
- Chap - 2-Transformée de LaplaceDocument11 pagesChap - 2-Transformée de LaplaceBadreddine BERREHAL50% (2)
- Commande Avancée PDFDocument296 pagesCommande Avancée PDFBouazzaPas encore d'évaluation
- Exos Application 1Document2 pagesExos Application 1Aymen HedPas encore d'évaluation
- Identification - 1er - 2nd - Ordre - ElvDocument5 pagesIdentification - 1er - 2nd - Ordre - Elvnohaila noha100% (1)
- Série Rég GM - GIDocument5 pagesSérie Rég GM - GINisrine DaoukiPas encore d'évaluation
- Chapitre2 Fonction de Transfert Et Asservissement Echantillonne-2020Document12 pagesChapitre2 Fonction de Transfert Et Asservissement Echantillonne-2020I C H I G OPas encore d'évaluation
- Commande ElectriqueDocument37 pagesCommande ElectriqueAbdelbaki ElfahemPas encore d'évaluation
- td3 Version1Document3 pagestd3 Version1SaadElHafidiPas encore d'évaluation
- CEM Diagramme de BodeDocument6 pagesCEM Diagramme de BodeMohamed SbaPas encore d'évaluation
- Automatique-Échanti TD 0910Document18 pagesAutomatique-Échanti TD 0910EA BeatszPas encore d'évaluation
- Cours Automatique PDFDocument125 pagesCours Automatique PDFOumarPas encore d'évaluation
- 145 Analyse Des Systemes AsservisDocument9 pages145 Analyse Des Systemes AsservisMohamed LahninePas encore d'évaluation
- Exposé - Echangeurs de ChaleurDocument32 pagesExposé - Echangeurs de ChaleurAnis Bouhous83% (6)
- Fascicule TDDocument4 pagesFascicule TDnajmimohamed176Pas encore d'évaluation
- TP MDF N°4 - Ecoulement Autour Dun ObstacleDocument5 pagesTP MDF N°4 - Ecoulement Autour Dun ObstacleTtt HggPas encore d'évaluation
- Exercices À Support Concret - Equations Du Premier OrdreDocument14 pagesExercices À Support Concret - Equations Du Premier Ordresjaubert100% (1)
- Travaux Diriges, Exercices, Annales DS: Département Automatique 2002-2003 Hei3 TC Regulation IndustrielleDocument60 pagesTravaux Diriges, Exercices, Annales DS: Département Automatique 2002-2003 Hei3 TC Regulation IndustrielleBafing DOSSO100% (1)
- TD PDFDocument20 pagesTD PDFabidinePas encore d'évaluation
- TD AiiDocument6 pagesTD AiimassinisssaPas encore d'évaluation
- Système A 2 BacsDocument28 pagesSystème A 2 BacsmassinisssaPas encore d'évaluation
- 5-Systèmes Hydrauliques: Modélisation Bond GraphDocument15 pages5-Systèmes Hydrauliques: Modélisation Bond GraphmassinisssaPas encore d'évaluation
- Deco MentationDocument34 pagesDeco MentationmassinisssaPas encore d'évaluation
- BacsDocument6 pagesBacsmassinisssa100% (1)
- Conception Et Optimisation Du Fonctionnement D'un Réacteur Agité Ouvert Du LaboratoireDocument76 pagesConception Et Optimisation Du Fonctionnement D'un Réacteur Agité Ouvert Du LaboratoireNa WelPas encore d'évaluation
- Cobalt RimkaDocument3 pagesCobalt RimkaCharte RimkaPas encore d'évaluation
- SansozDocument293 pagesSansozAbdelillah feghoulPas encore d'évaluation
- Définition Et Mesure de La Vitesse D'une Réaction ChimieDocument16 pagesDéfinition Et Mesure de La Vitesse D'une Réaction ChimieKhadija BiallachPas encore d'évaluation
- Analyse Et Simulation de Refroidissement Des Aubes Dune Turbine A GazDocument74 pagesAnalyse Et Simulation de Refroidissement Des Aubes Dune Turbine A GazMechmed100% (1)
- Serie-7 0Document8 pagesSerie-7 0DaboPas encore d'évaluation
- Heat Engines Course - StudentsDocument389 pagesHeat Engines Course - StudentsMouad NntsntzPas encore d'évaluation
- Base de Cours - Régulation InstrumentationDocument7 pagesBase de Cours - Régulation InstrumentationalexisbradPas encore d'évaluation
- Mast GM MehiaouiDocument96 pagesMast GM Mehiaouilamri adamPas encore d'évaluation
- Propulsion CoursDocument53 pagesPropulsion CoursYasmine YasminePas encore d'évaluation
- L AéronautiqueDocument24 pagesL Aéronautiquezebra00Pas encore d'évaluation
- polyGRC Fev2016Document94 pagespolyGRC Fev2016Ousseynou MboupPas encore d'évaluation
- PROPULSION 1ere Année - 221122 - 085003Document10 pagesPROPULSION 1ere Année - 221122 - 085003Kawther KerroumPas encore d'évaluation
- MG 25Document75 pagesMG 25katibraPas encore d'évaluation
- TPSIMULATEURDESPROCEDESDocument11 pagesTPSIMULATEURDESPROCEDESJulius Tandji OnanaPas encore d'évaluation
- BAY AbdenacerDocument141 pagesBAY AbdenacerMayssem SouidPas encore d'évaluation
- Commande Avancée PDFDocument296 pagesCommande Avancée PDFBouazzaPas encore d'évaluation
- Combustion - Série N°2Document1 pageCombustion - Série N°2Axel BekaertPas encore d'évaluation
- 52622348Document11 pages52622348Kamel IbrahimPas encore d'évaluation
- Extrait 42167210Document61 pagesExtrait 42167210sadegPas encore d'évaluation
- Mémoire Modélisation Réacteurs VFDocument46 pagesMémoire Modélisation Réacteurs VFBoukhelif BoualemPas encore d'évaluation
- TP3 Réacteur de Synthèse de LammoniacDocument2 pagesTP3 Réacteur de Synthèse de LammoniacÄyyoüb El-BchiriPas encore d'évaluation
- Projet AérauliqueDocument8 pagesProjet Aérauliquejawhar eddine boukhrisPas encore d'évaluation
- TCCL01 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique Et La Loi Entrée-Sortie en Effort D'un Réducteur Ou Multiplicateur de VitesseDocument9 pagesTCCL01 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique Et La Loi Entrée-Sortie en Effort D'un Réducteur Ou Multiplicateur de VitesseAbdelbassit FadilPas encore d'évaluation
- 03 Concentration D'une Solution de KH2PO4 Poste PIGNATDocument11 pages03 Concentration D'une Solution de KH2PO4 Poste PIGNATsana aitmimiPas encore d'évaluation
- Anhydride Phtalique - Procédé Moyenne TempératureDocument4 pagesAnhydride Phtalique - Procédé Moyenne TempératureHadjer zitPas encore d'évaluation
- Chapitre1 (Etudiants)Document79 pagesChapitre1 (Etudiants)ABDELALI SASSIOUIPas encore d'évaluation
- 2008 Ndiaye F TDocument295 pages2008 Ndiaye F TCronos OttoPas encore d'évaluation
- Cellule Et Systeme Ifr .Document18 pagesCellule Et Systeme Ifr .fkirine.abdelmoumene2004Pas encore d'évaluation
- 8853 Ka BoomDocument9 pages8853 Ka BoomYoann BourbonPas encore d'évaluation