Cours 16 - Cinématique Graphique - Mouvement Plan sur Plan Lycée Fermat Toulouse - CPGE MPSI/PCSI
Cinématique Graphique - Mouvement Plan sur Plan
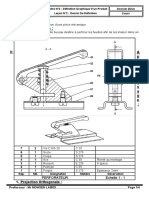
Problème tridimensionnel Problème plan Modèle
Piston 3
Vilebrequin 1 Plan 3
Piston 3
Plan 2
Bielle 2 Bielle 2
Plan 1 Vilebrequin 1
Bâti 0
Bâti 0
On s’intéresse au micromoteur d’aéromodélisme précédemment rencontré. Ce système permet de mettre en
mouvement de rotation continue par rapport au bâti 0 l’hélice (non représentée sur la vue mais qui est en liaison
complète avec le vilebrequin 1) à partir de la translation alternée par rapport au bâti 0 du piston 3. On constate que
les 3 plans 1, 2 et 3 (respectivement rattachés aux solides 1, 2 et 3) restent coïncidents au cours du mouvement :
c’est donc un problème plan sur plan. Cette particularité permet de simplifier le modèle 3D en un problème plan
pour lequel on pourra utiliser des techniques de résolution graphiques simples et rapides.
Exemple de système mécanique
MOTEUR DE MODELE REDUIT
De nombreux mécanismes présentent un cas particulier de mouvement : c’est le mouvement
(1)
plan sur plan. Cette particularité permet d’utiliser des propriétés originales afin de déterminer
la résolution
rapidement la cinématique de ces mouvements : ce sont les méthodes de résolution
graphique abordée ici
sera la méthode basée graphiques. Ce cours est donc consacré à l’étude de ce cas particulier et à une des méthodes
(1)
sur l’équiprojectivité. graphiques associées .
La méthode basé sur
le Centre Instantanée
de Rotation sera vue 1 - MOUVEMENT PLAN SUR PLAN
y
en école d’ingénieur. S
1.1. Définition
x
y0
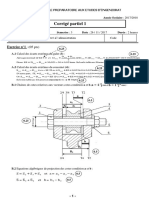
Soit un solide S associé au repère R(O, x , y , z z0 ) en
O θ
mouvement par rapport au repère R0(O0, x 0 , y 0 , z0 ).
Si le plan P(O x y ) lié à S reste constamment z0 = z
confondu avec le plan P0(O0 x 0 y 0 ) lié à R0 alors le O0
mouvement de S par rapport à R est qualifié de
z0 = z x0
mouvement plan sur plan.
1.2. Propriétés
La définition précédente implique les deux conséquences suivantes :
Les vecteurs vitesse de tous les points de S en mouvement par rapport au repère R 0
restent parallèles au plan P(O x y ) (ou P0(O0 x 0 y 0 )) : M S , VMS / R 0 .z 0 .
Le vecteur instantané de rotation de S par rapport à R0 est constamment colinéaire à la
normale au plan du mouvement : S / R 0 z 0 .
Florestan MATHURIN Page 1 sur 5
Cours 16 - Cinématique Graphique - Mouvement Plan sur Plan Lycée Fermat Toulouse - CPGE MPSI/PCSI
1.3. Conséquence
Le paramétrage du solide (S) par rapport au repère R0 ne nécessite que 3 paramètres : 2
translations dans le plan et 1 rotation d'axe perpendiculaire au plan. Le torseur cinématique de
S par rapport à R0 est donc de la forme suivante :
0 vx
C
S / R0
S / R0
0 vy
M
VM , S / R 0 0
M z (x
0 ,y0 , z0 )
Exemple
Si on considère une liaison linéaire annulaire d’axe
z
(O, x ) entre 2 solides 1 et 2, la forme générale de (2) x v x
ce torseur dans le cas tridimensionnel est donnée O
ci-contre. Si le problème est plan alors certains
x C2 / 1 y 0
0
termes du torseur non nuls dans le cas O z (x ,y ,z )
y
(1)
tridimensionnel deviennent nécessairement nuls.
Simplifications dans le cas d’un problème plan
Les termes barrés
dans les torseurs Problème de plan P(O x y ) Problème de plan P(O y z ) Problème de plan P(O x z )
cinématiques doivent
donc être x v x x v x x v x
nécessairement nuls
pour respecter y 0 y 0 y 0
l’hypothèse 0 0 0
mouvement plan O z (x ,y ,z ) O z (x ,y ,z ) O z (x ,y ,z )
Ce type de raisonnement se généralise à tous les torseurs des liaisons et permet ainsi de
minimiser le nombre d’inconnues cinématiques. Il n’y a que 3 Degrés De Liberté (DDL) au
maximum par liaison dans un problème plan.
2 - EQUIPROJECTIVITE
2.1. Définition
Le champ des vecteurs vitesse d’un solide indéformable S en mouvement par rapport à un
repère R est toujours équiprojectif, c'est-à-dire :
A S et B S → AB. VAS / R AB. VBS / R
VAS / R
Interprétation graphique :
A VBS / R
Pour appliquer la relation d’équiprojectivité il est indispensable que les
deux vecteurs vitesse soient ceux de deux points différents du MÊME
solide.
Florestan MATHURIN Page 2 sur 5
Cours 16 - Cinématique Graphique - Mouvement Plan sur Plan Lycée Fermat Toulouse - CPGE MPSI/PCSI
3 - METHODE DE RESOLUTION GRAPHIQUE PAR EQUIPROJECTIVITE
L’objectif d’une résolution graphique est de déterminer un ou des vecteurs vitesses à partir des
données d’entrée.
(2)
mouvement
caractérisé par une
direction (celle de la
Exemple du micromoteur. On connait en données d’entrées la vitesse de rotation de la
liaison glissière), un manivelle par rapport au bâti 0 (1000 tr/min), le rayon OB=3cm et on impose une échelle des
sens (donné sur le vitesses de 1cm pour 1m/s. L’objectif est de déterminer la vitesse de sortie du piston 3 par
dessin ou dans rapport au bâti 0.
l’énoncé), une norme
(en m/s).
Etape 1. Définition des mouvements entièrement connus (entrée)
(3)
mouvement L'objectif est de tracer un vecteur vitesse en un point M (par exemple) à partir des données
caractérisé par une d'entrée. On peut avoir imposé en mouvement d’entrée :
direction (celle
perpendiculaire au
Un mouvement de translation(2).
rayon OM), un sens Un mouvement de rotation autour d’un point (O par exemple) (3).
(donné par le sens de
la rotation sur le Le tracé du vecteur vitesse se fait ensuite en utilisant l'échelle des vitesses (donnée imposée ou
dessin ou dans
à fixer).
l’énoncé), une norme
(OM ω avec ω
vitesse de rotation en Exemple du micromoteur
rad/s).
On a en données d’entrées :
Rotation de la manivelle N=1000 tr/min 0
OB=3cm 3
Echelle des vitesses de 1cm pour 1m/s A
Un mouvement de rotaƟon est imposé en entrée → il faut
déterminer VB 1 / 0 : VB 1 / 0 2
- direction : perpendiculaire au rayon OB
- sens : sens trigo (donné sur le dessin)
2. 2.
- norme : ω = .N = .1000 105 rd/s B
60 60
O 1
→ VB 1 / 0 =3,15m/s (3,15 cm mesuré sur la
construction). 0
Attention à ne pas confondre échelle des vitesses et échelle
correspondant aux dimensions du mécanisme.
Etape 2. Définition des mouvements partiellement connus (sorties)
On utilise à cette étape les mêmes propriétés que pour l’étape 1 mais ici seules les directions
sont connues.
(2)
Pour les liaisons ponctuelles, on peut donner la direction Direction de
de la vitesse du point de contact M. M VM 2 / 1
(1)
Exemple du micromoteur
Le mouvement de sortie est un mouvement de translation rectiligne suivant l’axe vertical. La
direction de VA 3 / 0 est donc la même que celle de la liaison glissière.
Florestan MATHURIN Page 3 sur 5
Cours 16 - Cinématique Graphique - Mouvement Plan sur Plan Lycée Fermat Toulouse - CPGE MPSI/PCSI
Etape 3. Progression de solide en solide
On utilise la composition des vecteurs vitesses pour changer de solide et ainsi faire propager
l'information connue en allant de l’entrée vers la sortie (ou de la sortie vers l’entrée, c’est le
même principe). On utilise ensuite les informations sur les liaisons ou les mouvements pour
simplifier les relations de composition de mouvement.
Exemple du micromoteur
VA 3 / 0 VB 1 / 0
Composition de mouvement Composition de mouvement
VA 3 / 0 VA 3 / 2 VA 2 / 0 VB 2 / 0 VB 2 / 1 VB 1 / 0
Liaison 3/2 : Liaison 2/1 :
Liaison pivot parfaite Liaison pivot parfaite
VA 3 / 0 VA 2 / 0 VB 2 / 0 VB 1 / 0
en A → VA 3 / 2 0 en B → VB 2 / 1 0
Etape 4. Ecriture de la relation entre les vitesses de deux points liés à un même solide
On utilise l'équiprojectivité pour trouver une norme ou une projection d'un vecteur vitesse
inconnu à partir de la vitesse connue en un autre point.
Exemple du micromoteur
VA 2 / 0
On connait VB 2 / 0 (qui est égal à VB 1 / 0 ) et on connait la
direction de VA 2 / 0 (qui est celle de VA 3 / 0 ). 0
3
On applique la relation d’équiprojectivité sur le solide 2 → A
BA. VB2 / 0 BA. VA2 / 0
VB 1 / 0 2
B
O 1
0
Etape 5. Mesure de la vitesse en sortie
On recommence plusieurs fois les opérations précédentes si besoin jusqu’à obtenir le(s)
vecteur(s) vitesse recherché(s). On mesure la longueur du vecteur en sortie et en utilisant
l'échelle des vitesses, on donne la norme de la vitesse (le sens et la direction sont donnés sur la
figure).
Exemple du micromoteur
On a déterminé graphiquement VA 3 / 0 et on mesure 2,8cm pour VA 3 / 0 soit VA 3 / 0 2,8m/s.
Florestan MATHURIN Page 4 sur 5
Cours 16 - Cinématique Graphique - Mouvement Plan sur Plan Lycée Fermat Toulouse - CPGE MPSI/PCSI
4 - NOTION DE CIR (CENTRE INSTANTANEE DE ROTATION)
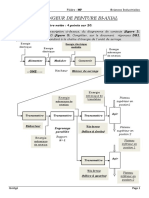
Soit un solide S en mouvement plan
VDS / R
S /R
sur plan dans P(O x y ) par rapport au
repère R(O, x , y , z ) tel que :
S / R 0
D
C S / R
O ≡ IS/R A B C
VA S / R 0
A P(O x y ) ()
avec S / R . VA S / R 0
(4)
voir cours 13. Dans ce cas le torseur est un glisseur(4) et qu’il admet un axe instantané de rotation ()
parallèle à S / R avec O (), VO S / R 0 .
On appelle centre instantané de rotation de S/R le point IS/R intersection entre le plan P(O x y )
et l’axe instantané de rotation (). Par conséquent IS/R est le point du plan P(O x y ) tel que
VIS / R S / R 0 .
Recherche graphique du CIR
P S, VP S / R VIS / R S / R PIS / R S / R PIS / R S / R → Le point IS/R se situe donc sur la
perpendiculaire en P au vecteur vitesse VP S / R .
Le CIR n'existe pas si le solide est en translation. Dans ce cas, il peut être considéré
comme étant à l'infini.
Pour un mouvement de rotation plane, le CIR est confondu avec le centre de la rotation (il
ne bouge pas)
A l’instant t + t le CIR peut être différent (d’où le nom instantané).
Si on considère le mouvement d’un solide S par rapport à un repère R, on appelle :
Base : la trajectoire du CIR IS/R par rapport à R.
Roulante : la trajectoire du CIR IS/R par rapport au solide S.
Visualisation expérimentale du CIR à un instant t donné pour le mouvement du vilebrequin et de la bielle du
micromoteur par rapport au corps par analyse d'images obtenues d’une caméra rapide (600000 images par
secondes) grâce à une technique de corrélation d'images.
Florestan MATHURIN Page 5 sur 5
Vous aimerez peut-être aussi
- Thème 1 - Poulie Redex-1Document1 pageThème 1 - Poulie Redex-1Anime forever 20160% (1)
- 14 TD Sujet - Torseur Cinétique Et Torseur Dynamique PDFDocument5 pages14 TD Sujet - Torseur Cinétique Et Torseur Dynamique PDFHassanbfk BfkPas encore d'évaluation
- TD 08 - Calcul VectorielDocument4 pagesTD 08 - Calcul Vectorielbhs channelPas encore d'évaluation
- Chap 04 - Ex 1D - Angles Et Valeurs Remarquables Du Cercle Trigonométrique - CORRIGEDocument2 pagesChap 04 - Ex 1D - Angles Et Valeurs Remarquables Du Cercle Trigonométrique - CORRIGEchikha medfethi0% (1)
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- M2103 - TD3 - CinématiqueDocument4 pagesM2103 - TD3 - CinématiqueClément DuvalPas encore d'évaluation
- Exo2 - Composition Des MouvementsDocument6 pagesExo2 - Composition Des MouvementsToufikJalalEddinePas encore d'évaluation
- Sujet de Synthèse 2 Cours Éléments de Machines 2019-2020Document5 pagesSujet de Synthèse 2 Cours Éléments de Machines 2019-2020Abdelmajid Aittaleb100% (1)
- Train ÉpicycloidalDocument3 pagesTrain ÉpicycloidalAhmed Farahidi75% (4)
- Capteurs ExercicesDocument1 pageCapteurs Exercicesالمثقف الصغير100% (1)
- Table-Élévatrice MinesDocument5 pagesTable-Élévatrice MinesHamzaoui ishakPas encore d'évaluation
- Regulateur WattDocument2 pagesRegulateur WattAmara Neji83% (6)
- TD N°4 MDFDocument10 pagesTD N°4 MDFEl Ami Ine100% (1)
- Chap3 Cinematique Du Solide OkDocument16 pagesChap3 Cinematique Du Solide OkmatozoPas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- TD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesDocument4 pagesTD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesZarroui Abdellah0% (1)
- TD 17 Corrigé - Liaisons ÉquivalentesDocument6 pagesTD 17 Corrigé - Liaisons ÉquivalentesJawad Hamriti50% (2)
- TD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocument6 pagesTD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationMönsîeur Abd NourPas encore d'évaluation
- TD Mont RoulementsDocument5 pagesTD Mont Roulementshello youPas encore d'évaluation
- Theorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteDocument8 pagesTheorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteothmanePas encore d'évaluation
- Déssin de DéfinitionDocument4 pagesDéssin de DéfinitionMohsen Laabidi100% (1)
- Modélisation Cinématique Des MécanismesDocument8 pagesModélisation Cinématique Des MécanismesmounirgemPas encore d'évaluation
- Série 3 Et Solution - Etau Porte Tube 1Document8 pagesSérie 3 Et Solution - Etau Porte Tube 1imad boussPas encore d'évaluation
- 05 - PFS TDDocument6 pages05 - PFS TDJean Jules Badiang100% (1)
- GM DS9-2013 CorrigéDocument4 pagesGM DS9-2013 CorrigéGray AbPas encore d'évaluation
- Mac Application Torseur 2Document1 pageMac Application Torseur 2Bilel LaamiriPas encore d'évaluation
- TD20 Correction PDFDocument3 pagesTD20 Correction PDFPapa Gning100% (1)
- Cours Theorie Des Mecanismes PDFDocument12 pagesCours Theorie Des Mecanismes PDFmaraghni_hassine7592100% (2)
- DS1 1Document11 pagesDS1 1Wissal GuilloulPas encore d'évaluation
- Correction - EMD ROBOTIQUE 2020 BMS - Fabrication Mécanique Et Productique FMPDocument5 pagesCorrection - EMD ROBOTIQUE 2020 BMS - Fabrication Mécanique Et Productique FMPomarPas encore d'évaluation
- TDDocument5 pagesTDYassir Ez-znafry100% (1)
- Exercice Porte de BusDocument2 pagesExercice Porte de BusArtros100% (1)
- Exercice Corrigé Du Grafcet LinéaireDocument4 pagesExercice Corrigé Du Grafcet LinéaireZOUHAIR EL-KHAIRANI100% (1)
- Exo 8 Batteur A HouleDocument4 pagesExo 8 Batteur A HouleDABAKH LDEEBOYPas encore d'évaluation
- 02 Bac 2008 Contrôle CorrigéDocument12 pages02 Bac 2008 Contrôle CorrigéMohamed AbedPas encore d'évaluation
- 3 Compteur Synchrone 2011 2012Document8 pages3 Compteur Synchrone 2011 2012Mohamed EL MASSOUDIPas encore d'évaluation
- Corrige Examen TM 2018Document5 pagesCorrige Examen TM 2018FAWZI RONALDOPas encore d'évaluation
- 121 2 Mini Concours Sup CorrigeDocument8 pages121 2 Mini Concours Sup CorrigeZaineb Abbad100% (1)
- 3 1 4 Schema CinematiqueDocument1 page3 1 4 Schema Cinematiquehitachi hadiPas encore d'évaluation
- TD2 CDocument1 pageTD2 Cpaul morphyPas encore d'évaluation
- TD 09 Corrigé - Cinématique Analytique - Dérivation Vectorielle PDFDocument8 pagesTD 09 Corrigé - Cinématique Analytique - Dérivation Vectorielle PDFDon Yassine100% (2)
- Corrigé TD 10 - Comportement Cinématique Des SystèmesDocument5 pagesCorrigé TD 10 - Comportement Cinématique Des Systèmesbhs channelPas encore d'évaluation
- TdengrenageDocument5 pagesTdengrenageImane FarrassPas encore d'évaluation
- Corrigé Exercice 1:: Manège Spin FlyDocument8 pagesCorrigé Exercice 1:: Manège Spin FlyFiras HamidPas encore d'évaluation
- FC05b Statique GraphiqueDocument7 pagesFC05b Statique Graphiquepouvoir Koussou100% (1)
- Sciences de Unite Projet PDFDocument13 pagesSciences de Unite Projet PDFmiraPas encore d'évaluation
- TD Révision Cinematique Du SolideDocument8 pagesTD Révision Cinematique Du SolideRomain MarroPas encore d'évaluation
- Cours CinematiqueDocument17 pagesCours Cinematiqueecomech0% (1)
- Modelisation Des Liaisons MecaniquesDocument5 pagesModelisation Des Liaisons MecaniquesayatextPas encore d'évaluation
- 2systeme EncaissageDocument39 pages2systeme Encaissageダークライオン ダークライオンPas encore d'évaluation
- Cotation FonctionnelleDocument27 pagesCotation Fonctionnellenajat ammichePas encore d'évaluation
- Ecriture Du Torseur Cinematique PDFDocument15 pagesEcriture Du Torseur Cinematique PDFapi34Pas encore d'évaluation
- F112 TD Corriges PDFDocument56 pagesF112 TD Corriges PDFEl Youbi MohammedPas encore d'évaluation
- TD28 CorrectionDocument8 pagesTD28 CorrectionWasfi ZakariaPas encore d'évaluation
- Corrigé Partiel 1-2018Document4 pagesCorrigé Partiel 1-2018Ramdane BoulahiaPas encore d'évaluation
- TD Trains Epicycloidaux PDFDocument3 pagesTD Trains Epicycloidaux PDFHechmi Chermiti100% (2)
- Hyperstatisme Et Mobilité: Liaisons en ParallèleDocument11 pagesHyperstatisme Et Mobilité: Liaisons en ParallèleMohamed OuaggaPas encore d'évaluation
- Mecanismes PDFDocument34 pagesMecanismes PDFesloch50% (2)
- IliasssDocument13 pagesIliasssBalalaŇaŖîf100% (1)
- Integration Scei 2020Document2 pagesIntegration Scei 2020BalalaŇaŖîfPas encore d'évaluation
- CcinpDocument12 pagesCcinpBalalaŇaŖîfPas encore d'évaluation
- Cours 10Document4 pagesCours 10BalalaŇaŖîfPas encore d'évaluation
- I - ResultatsDocument1 pageI - ResultatsBalalaŇaŖîfPas encore d'évaluation
- Melangeur de Peinture Bi-AxialDocument18 pagesMelangeur de Peinture Bi-AxialBalalaŇaŖîfPas encore d'évaluation
- PolytechDocument7 pagesPolytechBalalaŇaŖîfPas encore d'évaluation
- ENSIBSDocument13 pagesENSIBSBalalaŇaŖîfPas encore d'évaluation
- Génie InfoDocument2 pagesGénie InfoBalalaŇaŖîfPas encore d'évaluation
- Cours 09Document9 pagesCours 09BalalaŇaŖîfPas encore d'évaluation
- Cours 14Document4 pagesCours 14BalalaŇaŖîfPas encore d'évaluation
- Plaquette CCINPDocument8 pagesPlaquette CCINPBalalaŇaŖîfPas encore d'évaluation
- CNC Si MP 2019Document25 pagesCNC Si MP 2019BalalaŇaŖîfPas encore d'évaluation
- Exo MatricesDocument3 pagesExo MatricesBalalaŇaŖîfPas encore d'évaluation
- Résumé Asservissement SIDocument20 pagesRésumé Asservissement SIBalalaŇaŖîf100% (8)
- Cours 04Document10 pagesCours 04BalalaŇaŖîfPas encore d'évaluation
- 03 Poster ReductionDocument1 page03 Poster ReductionBalalaŇaŖîfPas encore d'évaluation
- Cours 06Document4 pagesCours 06BalalaŇaŖîfPas encore d'évaluation
- 16 Poster Int paraDocument1 page16 Poster Int paraBalalaŇaŖîfPas encore d'évaluation
- Cours Modelisation Des Liaisons PRDocument7 pagesCours Modelisation Des Liaisons PRDarylPas encore d'évaluation
- Corrige Exam M.G s3 s1!20!21 - Ll2phDocument4 pagesCorrige Exam M.G s3 s1!20!21 - Ll2phBertrand DingamPas encore d'évaluation
- Physique CorrigéDocument12 pagesPhysique CorrigéRANIAPas encore d'évaluation
- Physique Chapitre2 Mouvement Solide ExercicesDocument1 pagePhysique Chapitre2 Mouvement Solide ExercicesNoureddine ElkouayPas encore d'évaluation
- MVT VarieeDocument12 pagesMVT Varieeraniaattia2006mPas encore d'évaluation
- Devoir de Contrôle N°3 2018 2019 (MR Sfaxi Salah)Document5 pagesDevoir de Contrôle N°3 2018 2019 (MR Sfaxi Salah)Atef HandouraPas encore d'évaluation
- Ch4 Dynamique Point MatérielDocument17 pagesCh4 Dynamique Point MatérielAmine BajjiPas encore d'évaluation
- Cours Onde Mecanique ProgressiveDocument4 pagesCours Onde Mecanique Progressiveياسين أوطالب100% (1)
- Cours CharkaouiDocument26 pagesCours CharkaouilawlietshfPas encore d'évaluation
- Si PB01 MMC EfDocument23 pagesSi PB01 MMC EfKhaled JberiPas encore d'évaluation
- Série D'exercice 01Document2 pagesSérie D'exercice 01Ayman gamerPas encore d'évaluation
- 13Exercices-Travail Et EnergieDocument2 pages13Exercices-Travail Et EnergieEsli AmbinintsoaPas encore d'évaluation
- QCM Type Exam YGsDocument15 pagesQCM Type Exam YGsbillel.benchihaPas encore d'évaluation
- Physique Première CDDocument3 pagesPhysique Première CDBejamin Layiebe AssanaPas encore d'évaluation
- Sondage Ionosphérique - Mesure de La Hauteur Virtuelle de Réflexion D'une Onde Dans L'ionosphèreDocument2 pagesSondage Ionosphérique - Mesure de La Hauteur Virtuelle de Réflexion D'une Onde Dans L'ionosphèreAhmedHaddiPas encore d'évaluation
- CC HSLDocument1 pageCC HSLbrice mouadjePas encore d'évaluation
- Mesure de La Vitesse Par Effet DopplerDocument3 pagesMesure de La Vitesse Par Effet DopplerJalel KhediriPas encore d'évaluation
- TR PC Interf Lumineuses 1213Document92 pagesTR PC Interf Lumineuses 1213Mansour Achaour100% (1)
- Optique Ondulatoire 2020 PDFDocument61 pagesOptique Ondulatoire 2020 PDFFor DrivePas encore d'évaluation
- Exercice Sur Les MomentsDocument3 pagesExercice Sur Les MomentsDiagne100% (3)
- CorrectionTD2INFO by ExoSupDocument38 pagesCorrectionTD2INFO by ExoSupBoukhems HamzaPas encore d'évaluation
- Gravimétrie IDocument28 pagesGravimétrie IAnoir RzgPas encore d'évaluation
- Exam 21 Physiq FmosDocument2 pagesExam 21 Physiq FmosIssouf BerthePas encore d'évaluation
- TD1 Prepa2Document3 pagesTD1 Prepa2Aldany lyly GxPas encore d'évaluation
- Transp Chap5Document33 pagesTransp Chap5api-3703339Pas encore d'évaluation
- Chimie (07 Points) : SujetDocument3 pagesChimie (07 Points) : SujetSarah Sara50% (2)
- 1 - Cours de Projectilie 2017Document4 pages1 - Cours de Projectilie 2017Stachis's LightPas encore d'évaluation
- TD8 CorrectionDocument8 pagesTD8 CorrectionAdrien KOBANKAPas encore d'évaluation