Vous aimerez peut-être aussi
- TD 16 - Lois Entrée-Sortie en Position Et en VitesseDocument6 pagesTD 16 - Lois Entrée-Sortie en Position Et en Vitessebhs channel0% (1)
- Codes Erreur MercedesDocument91 pagesCodes Erreur MercedesLakbirPas encore d'évaluation
- TD 1Document3 pagesTD 1Khalid Ahyeoud100% (1)
- Klubprepa Extrait 6962Document7 pagesKlubprepa Extrait 6962bhsbhs190% (1)
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésD'EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- CI05 TD13 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument4 pagesCI05 TD13 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- Cours de Thermopropulsion IIDocument84 pagesCours de Thermopropulsion IIlazhor20% (5)
- Manuel D'utilisation: D 2866 E D 2866 TE D 2866 LE D 2866 LXEDocument64 pagesManuel D'utilisation: D 2866 E D 2866 TE D 2866 LE D 2866 LXEДориана КирчеваPas encore d'évaluation
- Pompes Et Compresseurs Exercices Et ProblemesDocument21 pagesPompes Et Compresseurs Exercices Et ProblemesHoussame Naim50% (2)
- TD Helico AscenseurDocument8 pagesTD Helico AscenseurWakule Christian MurhabaziPas encore d'évaluation
- TD Révision Cinematique Du SolideDocument8 pagesTD Révision Cinematique Du SolideRomain MarroPas encore d'évaluation
- 1 Sujet VirageDocument4 pages1 Sujet VirageNadia DridiPas encore d'évaluation
- TD 08Document4 pagesTD 08Abdou HamaouiPas encore d'évaluation
- TD Cinematique 9Document5 pagesTD Cinematique 9Jed MansouriPas encore d'évaluation
- TD Cinématique CHARIOT FILOGUIDEDocument4 pagesTD Cinématique CHARIOT FILOGUIDELamia Achour Ep Zanned100% (3)
- TD MecaniqueDocument13 pagesTD MecaniqueSovann_Long80% (5)
- Chap2 Liaisons Solides VAS2 Potel Gatignol PDFDocument11 pagesChap2 Liaisons Solides VAS2 Potel Gatignol PDFDamien MirandaPas encore d'évaluation
- TD 10Document49 pagesTD 10Nassro Ziad100% (1)
- TD2 - Cinématique Du Solide - 2020Document3 pagesTD2 - Cinématique Du Solide - 2020R1V3NPas encore d'évaluation
- TD 3 CinemaTiqueDocument15 pagesTD 3 CinemaTiqueMohamed OuladPas encore d'évaluation
- Cine Solide IndeformableDocument16 pagesCine Solide IndeformableAkram Ben KhemisPas encore d'évaluation
- TD2 - Cine - 2017 18Document4 pagesTD2 - Cine - 2017 18Wael YossraPas encore d'évaluation
- CI02 TD03 Sujet - Interpréter Un Schéma CinématiqueDocument3 pagesCI02 TD03 Sujet - Interpréter Un Schéma CinématiqueKhaled JberiPas encore d'évaluation
- TD-Cinématique: Compresseur ROOTDocument4 pagesTD-Cinématique: Compresseur ROOTGTA5player lucassPas encore d'évaluation
- PT 97 SI1 PDFDocument19 pagesPT 97 SI1 PDFntabPas encore d'évaluation
- TD - Chapitre 3-2022Document3 pagesTD - Chapitre 3-2022R1V3NPas encore d'évaluation
- Vérin MélangeurDocument10 pagesVérin MélangeurahmedguerinPas encore d'évaluation
- TD - Cinématique SolideDocument3 pagesTD - Cinématique SolideAbdelkhalekBenOmarPas encore d'évaluation
- 00 2023 TD Révisions PTSI PTDocument8 pages00 2023 TD Révisions PTSI PTimadbourzamPas encore d'évaluation
- Aero Generate UrDocument6 pagesAero Generate UrbouhaliPas encore d'évaluation
- Meca SolidDocument2 pagesMeca SolidMdzayd EL FahimePas encore d'évaluation
- 8 - Trains D'engrenagesDocument20 pages8 - Trains D'engrenageseslochPas encore d'évaluation
- Chapitre 2 PDFDocument4 pagesChapitre 2 PDFAmd JedPas encore d'évaluation
- Cis Variateur PlateauDocument2 pagesCis Variateur PlateauSafae Bekkal0% (1)
- Pendule Elastique Exercices Non Corriges 1 2Document4 pagesPendule Elastique Exercices Non Corriges 1 2Llouis PhysicsPas encore d'évaluation
- TD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesDocument4 pagesTD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesZarroui Abdellah0% (1)
- Cinematique Ex2004Document16 pagesCinematique Ex2004Larbi Elbakkali100% (1)
- Mécanisme D'ouverture Automatique D'une Trappe de DésenfumageDocument2 pagesMécanisme D'ouverture Automatique D'une Trappe de DésenfumageSoulaiman Andahmou0% (1)
- Ouvre Barriere SinusmaticDocument6 pagesOuvre Barriere SinusmaticmoumouPas encore d'évaluation
- TD 14 - Cinématique Du Contact PonctuelDocument5 pagesTD 14 - Cinématique Du Contact PonctuelboujbalPas encore d'évaluation
- Polycopie de TD 2013Document70 pagesPolycopie de TD 2013hichamkabel100% (1)
- Exercices de Statique TSI 1Document31 pagesExercices de Statique TSI 1Mamoun DrissiPas encore d'évaluation
- TD1 PFS 17 18Document4 pagesTD1 PFS 17 18Yassine Bouchatta50% (2)
- Examens de MécaniqueDocument18 pagesExamens de MécaniqueAicha DaouPas encore d'évaluation
- TD1 Mec Ana 2020 ÉnoncéDocument3 pagesTD1 Mec Ana 2020 ÉnoncéMeddour WassimPas encore d'évaluation
- Exam 2019 20 1 1Document9 pagesExam 2019 20 1 1laurynPas encore d'évaluation
- Exos CinématiqueDocument40 pagesExos Cinématiquehamzasaad615Pas encore d'évaluation
- 4-Cinematique Et Elements Cinetiques D'un SolideDocument4 pages4-Cinematique Et Elements Cinetiques D'un Solideabdrahim benaliPas encore d'évaluation
- TDDocument5 pagesTDYassir Ez-znafry100% (1)
- TSI3 ModelisationDocument12 pagesTSI3 Modelisationlouna yunaPas encore d'évaluation
- 1 - TD13 Cinématique Schémas CinématiquesDocument6 pages1 - TD13 Cinématique Schémas CinématiquesCorentin ProdPas encore d'évaluation
- TD Cinématique 111Document9 pagesTD Cinématique 111Exode Christ GuiellePas encore d'évaluation
- Cinema Ti QueDocument8 pagesCinema Ti Quetaupin1992Pas encore d'évaluation
- Bras A 4 AxesDocument2 pagesBras A 4 AxesMohamed NaciriPas encore d'évaluation
- DS Mecanique 12128539811Document5 pagesDS Mecanique 12128539811Guy EffaPas encore d'évaluation
- DroneDocument13 pagesDroneMeziane LarbiPas encore d'évaluation
- Sec E3a 2011 Si MP PDFDocument25 pagesSec E3a 2011 Si MP PDFAbdelmajid AittalebPas encore d'évaluation
- TD 3 StatiqueDocument18 pagesTD 3 Statiquefoufoua100% (1)
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- 03.2 - Cinématique Du Point - TD2Document4 pages03.2 - Cinématique Du Point - TD2Khaled JberiPas encore d'évaluation
- Klubprepa Extrait 4760Document4 pagesKlubprepa Extrait 4760Mimita Lafleur100% (1)
- Cinématique Des Solides - TD2 EnoncéDocument3 pagesCinématique Des Solides - TD2 EnoncéImad HakkachePas encore d'évaluation
- 2 Chapitre 2Document73 pages2 Chapitre 2mohamed benabbouPas encore d'évaluation
- CI05 Cours - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument10 pagesCI05 Cours - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- CI04 TD12 Sujet - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementDocument4 pagesCI04 TD12 Sujet - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementKhaled JberiPas encore d'évaluation
- CI05 TD14 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéDocument8 pagesCI05 TD14 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéKhaled JberiPas encore d'évaluation
- CI05 TD13 Sujet - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument8 pagesCI05 TD13 Sujet - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- CI10 Cours - Evaluer Et Prévoir Le Comportement Fréquentiel Des SLCIDocument19 pagesCI10 Cours - Evaluer Et Prévoir Le Comportement Fréquentiel Des SLCIKhaled JberiPas encore d'évaluation
- CI04 TD12 Corrigé - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementDocument7 pagesCI04 TD12 Corrigé - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementKhaled JberiPas encore d'évaluation
- coursMP2I AlgebreDocument118 pagescoursMP2I AlgebreKhaled JberiPas encore d'évaluation
- CI06 Cours - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes OuvertesDocument11 pagesCI06 Cours - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes OuvertesKhaled JberiPas encore d'évaluation
- CI06 TD15 Corrigé - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - ÉquilibreDocument12 pagesCI06 TD15 Corrigé - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - ÉquilibreKhaled Jberi100% (1)
- CI11 TD28 Sujet - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes FerméesDocument4 pagesCI11 TD28 Sujet - Déterminer La Loi de Commande en Effort D - Un Mécanisme À L - Équilibre - Cas Des Chaînes FerméesKhaled JberiPas encore d'évaluation
- CI05 TD14 Sujet - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéDocument10 pagesCI05 TD14 Sujet - Déterminer Le Modèle de Connaissance D - Un Système Asservi PerturbéKhaled Jberi100% (1)
- CI02 TD05 Corrigé - Imposer Une VitesseDocument6 pagesCI02 TD05 Corrigé - Imposer Une VitesseKhaled JberiPas encore d'évaluation
- CI01 TD02 Corrigé - Analyser Et Décrire La Structure D - Un SystèmeDocument2 pagesCI01 TD02 Corrigé - Analyser Et Décrire La Structure D - Un SystèmeKhaled JberiPas encore d'évaluation
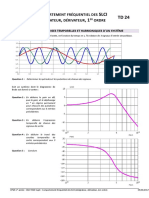
- CI10 TD24 Sujet - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Document4 pagesCI10 TD24 Sujet - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Khaled JberiPas encore d'évaluation
- CI02 TD04 Corrigé - Imposer Une Trajectoire - Imposer Une PositionDocument5 pagesCI02 TD04 Corrigé - Imposer Une Trajectoire - Imposer Une PositionKhaled JberiPas encore d'évaluation
- CI09 TD23 Sujet - Déterminer Une Loi Entrée-Sortie Par Fermeture CinématiqueDocument6 pagesCI09 TD23 Sujet - Déterminer Une Loi Entrée-Sortie Par Fermeture CinématiqueKhaled JberiPas encore d'évaluation
- CI10 TD24 Corrigé - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Document7 pagesCI10 TD24 Corrigé - Comportement Fréquentiel Des SLCI (Intégrateur, Dérivateur, 1er Ordre)Khaled JberiPas encore d'évaluation
- CI02 Cours - Déterminer Les Lois de Commande en Mouvement D - Un Mécanisme - Cas Des Chaînes OuvertesDocument15 pagesCI02 Cours - Déterminer Les Lois de Commande en Mouvement D - Un Mécanisme - Cas Des Chaînes OuvertesKhaled JberiPas encore d'évaluation
- CI02 TD03 Sujet - Interpréter Un Schéma CinématiqueDocument3 pagesCI02 TD03 Sujet - Interpréter Un Schéma CinématiqueKhaled JberiPas encore d'évaluation
- CI01 TD02 Sujet - Analyser Et Décrire La Structure D - Un SystèmeDocument8 pagesCI01 TD02 Sujet - Analyser Et Décrire La Structure D - Un SystèmeKhaled JberiPas encore d'évaluation
- CI01 TD01 Sujet - Analyser Et Décrire Les Fonctions D - Un SystèmeDocument3 pagesCI01 TD01 Sujet - Analyser Et Décrire Les Fonctions D - Un SystèmeKhaled JberiPas encore d'évaluation
- CI02 TD03 Corrigé - Interpréter Un Schéma CinématiqueDocument6 pagesCI02 TD03 Corrigé - Interpréter Un Schéma CinématiqueKhaled JberiPas encore d'évaluation
- CI01 TD01 Corrigé - Analyser Et Décrire Les Fonctions D - Un SystèmeDocument2 pagesCI01 TD01 Corrigé - Analyser Et Décrire Les Fonctions D - Un SystèmeKhaled JberiPas encore d'évaluation
- CI01 Cours - Analyser Et Décrire La Structure D - Un SystèmeDocument9 pagesCI01 Cours - Analyser Et Décrire La Structure D - Un SystèmeKhaled JberiPas encore d'évaluation
- CI01 Cours - Analyser Et Décrire Les Fonctions D - Un SystèmeDocument5 pagesCI01 Cours - Analyser Et Décrire Les Fonctions D - Un SystèmeKhaled JberiPas encore d'évaluation
- Guide 20competition1973Document66 pagesGuide 20competition1973GORDPas encore d'évaluation
- ECR58 ECR88 Plus BrochureDocument12 pagesECR58 ECR88 Plus Brochuredalibor_bogdan100% (1)
- Corrigé Fiche de Travail 1Document4 pagesCorrigé Fiche de Travail 1ursulaahoulahouPas encore d'évaluation
- MS05Document36 pagesMS05tomas100% (1)
- Chap.4.Installations PneumatiquesDocument71 pagesChap.4.Installations PneumatiquesAbdelghani Cheniki100% (2)
- Exo 04 05 Stat Liaison Equiv Cor PDFDocument4 pagesExo 04 05 Stat Liaison Equiv Cor PDFJourdan MbappePas encore d'évaluation
- Hdi Edc 15C2 Moteur DW10-1Document428 pagesHdi Edc 15C2 Moteur DW10-1lom100% (1)
- Hydraulique Symboles PDFDocument17 pagesHydraulique Symboles PDFwoulkanPas encore d'évaluation
- HS 6023Document61 pagesHS 6023ebedoyadPas encore d'évaluation
- Éléments de MachineDocument6 pagesÉléments de MachineAnonymous jmFTK5T100% (1)
- Muf 112131Document2 pagesMuf 112131didinePas encore d'évaluation
- DL420 A Borchure PDFDocument20 pagesDL420 A Borchure PDFAyoub RouissiPas encore d'évaluation
- Fiches pdf943Document211 pagesFiches pdf943Алексей Миронов100% (1)
- Partie 2 Cotations Et TolerancesDocument17 pagesPartie 2 Cotations Et TolerancesErnest AdouPas encore d'évaluation
- M5 - TD Dynamique de RotationDocument4 pagesM5 - TD Dynamique de RotationkldmntPas encore d'évaluation
- CarburateurDocument3 pagesCarburateurKHALIDPas encore d'évaluation
- Procedes de Demarrages Des Moteurs Cours 1Document11 pagesProcedes de Demarrages Des Moteurs Cours 1serignebabacarb6Pas encore d'évaluation
- Synthese Vis BoulonDocument1 pageSynthese Vis BoulonNaoufel Fares100% (1)
- FR Cherubini Cat Acc Manuels PDFDocument119 pagesFR Cherubini Cat Acc Manuels PDFMURATPas encore d'évaluation
- Etude Des Principaux DéfautsDocument31 pagesEtude Des Principaux DéfautsKo Kito100% (1)
- Sherco 250-300 Sef-R Six - Days 2016Document41 pagesSherco 250-300 Sef-R Six - Days 2016Jose Manuel Sanchez ContrerasPas encore d'évaluation
- Ii. Grandeurs de FonctionnementDocument7 pagesIi. Grandeurs de FonctionnementSamar ArbiPas encore d'évaluation
- Howden Compressor Manual PDFDocument86 pagesHowden Compressor Manual PDFSandiSandiiPas encore d'évaluation
- Carburateur Weber 32 Dir 4 PDFDocument5 pagesCarburateur Weber 32 Dir 4 PDFStéphane Audriaz100% (1)
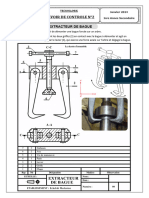
- DC2-2024-Extracteur bague-1ASDocument5 pagesDC2-2024-Extracteur bague-1ASgmar.ghaziPas encore d'évaluation
- Exercice Verin HydrauliqueDocument3 pagesExercice Verin Hydrauliquemerhawi memePas encore d'évaluation