Vous aimerez peut-être aussi
- Cinemati - STM 2022Document5 pagesCinemati - STM 2022FatimaZahra QOBBIPas encore d'évaluation
- Meca CH3 Epss - VF-20-21Document7 pagesMeca CH3 Epss - VF-20-21Franck Wilfried AdebouPas encore d'évaluation
- 1 - MOUVEMENT - Rotation - Exp - Et - SM PDFDocument4 pages1 - MOUVEMENT - Rotation - Exp - Et - SM PDFAzizElheni100% (1)
- C113 CinématiqueDocument8 pagesC113 Cinématiquedid TouzoPas encore d'évaluation
- CH 4 Mouvement CirculaireDocument5 pagesCH 4 Mouvement Circulairemulungula isalimyaPas encore d'évaluation
- 3 2 4 Vitesse AccelerationDocument1 page3 2 4 Vitesse AccelerationPierre JeanmaxPas encore d'évaluation
- Cours - Vitesse Et RotationDocument20 pagesCours - Vitesse Et Rotationsanaà rhouzaliPas encore d'évaluation
- Rotation D Un Solide Indeformable Autour D Un Axe Fixe Cours 4Document4 pagesRotation D Un Solide Indeformable Autour D Un Axe Fixe Cours 4Omar OutaharPas encore d'évaluation
- ATS Partie 1: Mécanique Chapitre 1: Cinématique Du Point: I. Repérage Dans L'espace Et Dans Le TempsDocument9 pagesATS Partie 1: Mécanique Chapitre 1: Cinématique Du Point: I. Repérage Dans L'espace Et Dans Le TempsEl BenPas encore d'évaluation
- Cours Equations de MouvementDocument10 pagesCours Equations de Mouvementjulien skorkaPas encore d'évaluation
- Chap 3cinématique PDFDocument11 pagesChap 3cinématique PDFStarDawnPas encore d'évaluation
- FichPhys Oscil PDFDocument2 pagesFichPhys Oscil PDFsifo mohPas encore d'évaluation
- CHAPITRE 2 Cinématique Du SolideDocument22 pagesCHAPITRE 2 Cinématique Du Solideyoussefachaaou10Pas encore d'évaluation
- 1 Résumé Cours OndeDocument2 pages1 Résumé Cours OndeEmna TräadPas encore d'évaluation
- Fiche MécaniqueDocument15 pagesFiche MécaniqueAdel Haj SalemPas encore d'évaluation
- CH2 - Cin PT Mat PDFDocument8 pagesCH2 - Cin PT Mat PDFGuy YgalPas encore d'évaluation
- 2 - MOUVEMENT - Rotation - Exp - Et - SMDocument5 pages2 - MOUVEMENT - Rotation - Exp - Et - SMReda SaadaniPas encore d'évaluation
- Cinématique Du Solide - ExtraitDocument8 pagesCinématique Du Solide - ExtraitSékhou DiakitéPas encore d'évaluation
- 1-1-ROTATION D'un SolideDocument4 pages1-1-ROTATION D'un SolidesimoPas encore d'évaluation
- Chap 2 VF Mecanique Du Point SVTU 2019Document21 pagesChap 2 VF Mecanique Du Point SVTU 2019azzamPas encore d'évaluation
- Chap-II Cinématique Du PointDocument24 pagesChap-II Cinématique Du PointIlyes Ben HacenePas encore d'évaluation
- Cinématique Du Point Matériel 1Document8 pagesCinématique Du Point Matériel 1sambe.elPas encore d'évaluation
- Activité MouvementDocument2 pagesActivité Mouvementmohamed safiPas encore d'évaluation
- TDsMECA2011 SCIDocument33 pagesTDsMECA2011 SCIHussel DonkengPas encore d'évaluation
- Cinétique 2021-2022Document6 pagesCinétique 2021-2022Wissal ElPas encore d'évaluation
- Vecteur Vitesse Audio 21-22Document24 pagesVecteur Vitesse Audio 21-22hugo.bakalarz7Pas encore d'évaluation
- Formules D'lectrotechniquesDocument2 pagesFormules D'lectrotechniquesHicham CherrabiPas encore d'évaluation
- ch6 Mouvement Vitesse AccelerationDocument6 pagesch6 Mouvement Vitesse AccelerationFantine DonierPas encore d'évaluation
- Chapitre16 - Théorème Du Moment Cinétique Et Systèmes en RotationDocument7 pagesChapitre16 - Théorème Du Moment Cinétique Et Systèmes en RotationMohamed HnaPas encore d'évaluation
- Mouvement PlanDocument5 pagesMouvement Plansimouhamed83Pas encore d'évaluation
- Chapitre II: Cinématique Sans Changement de RéférentielDocument49 pagesChapitre II: Cinématique Sans Changement de RéférentielDINOPas encore d'évaluation
- 30 DynamiqueDocument20 pages30 DynamiqueAKRAMPas encore d'évaluation
- Dynamique CoursDocument5 pagesDynamique CoursCyrille DjankouPas encore d'évaluation
- Chap. 02-Cinématique Du Point BON1Document13 pagesChap. 02-Cinématique Du Point BON1PFEPas encore d'évaluation
- TD Mécanique CDocument47 pagesTD Mécanique CwillyPas encore d'évaluation
- 4 - Dynamique Des Systèmes MécaniquesDocument5 pages4 - Dynamique Des Systèmes MécaniquesChaima LajiliPas encore d'évaluation
- Chap I-CINEMATIQUEDocument40 pagesChap I-CINEMATIQUEBalla GassamaPas encore d'évaluation
- TP N°1 - Vitesse Et AccélérationDocument6 pagesTP N°1 - Vitesse Et AccélérationNou-thy SiongPas encore d'évaluation
- Chap2 Cinématique2Document33 pagesChap2 Cinématique2Yassine RakchoPas encore d'évaluation
- Théorèmes Généraux de la Dynamique - ١٠١١٣٨Document19 pagesThéorèmes Généraux de la Dynamique - ١٠١١٣٨Yassine MorokuPas encore d'évaluation
- Ecriture Du Torseur Cinematique PDFDocument15 pagesEcriture Du Torseur Cinematique PDFapi34Pas encore d'évaluation
- Cinematique AnalytiqueDocument6 pagesCinematique Analytiquegildas assoumou allogoPas encore d'évaluation
- Fiche Connaissance Mouvement de TranslationDocument2 pagesFiche Connaissance Mouvement de Translationmehdi.jaadi.proPas encore d'évaluation
- MECANIQUEDocument38 pagesMECANIQUESoufianePas encore d'évaluation
- Cours Rotation D'un Solide Autour D'un Axe FixeDocument3 pagesCours Rotation D'un Solide Autour D'un Axe FixeAli OuchnPas encore d'évaluation
- Cinematique Du Point MaterielDocument9 pagesCinematique Du Point MaterielEmin MohamedPas encore d'évaluation
- Cinématique Analytique: Mouvement de Translation Rectiligne UniformeDocument4 pagesCinématique Analytique: Mouvement de Translation Rectiligne UniformececePas encore d'évaluation
- 2020 - Chp4-Cinétique Du SolideDocument6 pages2020 - Chp4-Cinétique Du SolideFatiha HouyamePas encore d'évaluation
- Corrigé Des Exercices 11 - 12 Et 14 Série 1Document10 pagesCorrigé Des Exercices 11 - 12 Et 14 Série 1Iymen BoutiPas encore d'évaluation
- PSI3 ModelisationDocument16 pagesPSI3 Modelisationلا إلٰه إلّا اللهPas encore d'évaluation
- Cinematique CoursDocument3 pagesCinematique Courswelvye 1Pas encore d'évaluation
- Présentation Soutenance M1 PhysiqueDocument44 pagesPrésentation Soutenance M1 PhysiquegillesgrenotPas encore d'évaluation
- Rottion 3Document2 pagesRottion 3Mohsen ArfaouiPas encore d'évaluation
- SP20-TE-03-19 - Chapter 2 PDFDocument3 pagesSP20-TE-03-19 - Chapter 2 PDFBatungwanayo EnzoPas encore d'évaluation
- Cours La Rotation 1bacfDocument5 pagesCours La Rotation 1bacfJihad ELPas encore d'évaluation
- Fiche Meca2Document5 pagesFiche Meca2yumiPas encore d'évaluation
- Cours CinématiqueDocument4 pagesCours CinématiquesamiPas encore d'évaluation
- MecaRelat MEEF M1-S1 TD4Document2 pagesMecaRelat MEEF M1-S1 TD4Youssef DahaniPas encore d'évaluation
- Homographie: Homographie : transformations en vision par ordinateurD'EverandHomographie: Homographie : transformations en vision par ordinateurPas encore d'évaluation
- 657 Corrige CG Sti2d 2013Document50 pages657 Corrige CG Sti2d 2013LE TOHICPas encore d'évaluation
- Premiere Evaluation Type E3cDocument2 pagesPremiere Evaluation Type E3cLE TOHICPas encore d'évaluation
- Corrigé Maths Session 2019Document5 pagesCorrigé Maths Session 2019LE TOHICPas encore d'évaluation
- Corrigé Maths Session 2019Document5 pagesCorrigé Maths Session 2019LE TOHICPas encore d'évaluation
- TDDocument14 pagesTDYassir Ez-znafryPas encore d'évaluation
- Mécanique 1re Année MPSI-PCSI-PTSIDocument0 pageMécanique 1re Année MPSI-PCSI-PTSIOussam Ouadidi75% (4)
- SPH4U M1 AD1 Piste1 CorrigeDocument4 pagesSPH4U M1 AD1 Piste1 CorrigeAdam MezouarPas encore d'évaluation
- Corrige Examen TM 2018Document5 pagesCorrige Examen TM 2018FAWZI RONALDOPas encore d'évaluation
- Cours Engrenages PDFDocument5 pagesCours Engrenages PDFJesuis ContentPas encore d'évaluation
- 02.3 - Dérivée Vectorielle - TD1Document7 pages02.3 - Dérivée Vectorielle - TD1AlaealeaPas encore d'évaluation
- Partie 1 TrnasmissionDocument17 pagesPartie 1 TrnasmissionMohamed LemrabottPas encore d'évaluation
- Corrige Ecole de L Air MP 2003Document4 pagesCorrige Ecole de L Air MP 2003Youssef El Asri50% (2)
- Physique Résumé Du Cours en Fiches MPSI-MPDocument176 pagesPhysique Résumé Du Cours en Fiches MPSI-MPyassino89100% (22)
- Réussir L'examen D'entrée En: MédecineDocument52 pagesRéussir L'examen D'entrée En: Médecinemechergui mariemPas encore d'évaluation
- Cours Sur Les Accouplements - 1Document10 pagesCours Sur Les Accouplements - 1justin onguenePas encore d'évaluation
- Cm-Modelisation Des Liaisons MecaniqueDocument11 pagesCm-Modelisation Des Liaisons MecaniqueYosso YohannPas encore d'évaluation
- TD 1 Association de Deux LiaisonsDocument2 pagesTD 1 Association de Deux LiaisonsGray AbPas encore d'évaluation
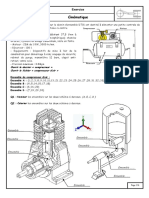
- Exercice Compresseur CinematiqueDocument6 pagesExercice Compresseur CinematiqueManel AyebPas encore d'évaluation
- Torseur LiaisonsDocument1 pageTorseur LiaisonsAmina Dinari100% (1)
- La Fraiseuse Universelle 10N GambinDocument6 pagesLa Fraiseuse Universelle 10N GambinBechir Hamdi0% (1)
- Transmission D11Document61 pagesTransmission D11yassine omarPas encore d'évaluation
- Corrigé DS5Document6 pagesCorrigé DS5elbiyatimanalPas encore d'évaluation
- 03 ParametrageDocument7 pages03 ParametrageDHia Ben AichaPas encore d'évaluation
- Chapitre 1Document20 pagesChapitre 1Tom HardyPas encore d'évaluation
- Cinématique Des FluidesDocument7 pagesCinématique Des FluidesMohamed Ilias HamaniPas encore d'évaluation
- Correction Ap12 Torseur de CohesionDocument3 pagesCorrection Ap12 Torseur de CohesionMPSI 2021Pas encore d'évaluation
- Si PB01 MMC EfDocument23 pagesSi PB01 MMC EfKhaled JberiPas encore d'évaluation
- TD Cinematique Renforcement 2021Document3 pagesTD Cinematique Renforcement 2021Firmin Konan100% (1)
- 09 Differentes Coordonnees PhysiqueDocument8 pages09 Differentes Coordonnees PhysiqueKakiplg MogPas encore d'évaluation
- Chap2 Lembrayage Mécanique - E. LerningDocument11 pagesChap2 Lembrayage Mécanique - E. LerningDavid100% (1)
- ACFrOgA6lJyVGtOaP9MF0vC2c1Cz8m2gjoQ3vOeDhj6mD6sjCEsnT21r6s3A5wDdtMcWBNbqLYaK Sy1uE VB1RxH83n 10GIoD5i7rgXSrKrkD6pxq2XYfh2Zjjae970buqb k9NGny2Bd6L3cvDocument28 pagesACFrOgA6lJyVGtOaP9MF0vC2c1Cz8m2gjoQ3vOeDhj6mD6sjCEsnT21r6s3A5wDdtMcWBNbqLYaK Sy1uE VB1RxH83n 10GIoD5i7rgXSrKrkD6pxq2XYfh2Zjjae970buqb k9NGny2Bd6L3cvRouzalizakariaPas encore d'évaluation
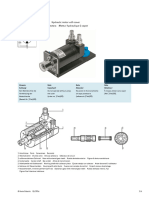
- Deenesfr v2.1 Hydraulic Motor With CoverDocument4 pagesDeenesfr v2.1 Hydraulic Motor With CovercamcadPas encore d'évaluation
- ExcinetrDocument3 pagesExcinetrLucas LIMAPas encore d'évaluation
- 5.chap.5 Boite de Vitesses EtudiantDocument33 pages5.chap.5 Boite de Vitesses EtudiantAli JaouediPas encore d'évaluation
- Cours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Document8 pagesCours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Youssef CherniPas encore d'évaluation